NASA learned early on that the decompression problems of soft space suits could be avoided if hard-shelled full pressure suits were used. If a soft suit was full pressurized, the astronaut would be splayed out like a starfish and probably could not bend their arms or legs. A hard suit does not have that problem, but instead has the problem of wearing out the astronaut. They are about as easy to work in as a set of medieval plate armor constructed of pure osmium. So NASA looked into adding a powered exoskeleton to the suit, to reduce the muscle strain on the astronaut. NASA eventually decided it was not worth the effort, but the idea just wouldn't go away. Especially if the powered exoskeleton is attached to a suit of armor. It would be "powered armor".
And it took about five minutes for science fiction writers to figure out if you put weapons on on the armor you'd have an unstoppable one-man-army suit that would let a 99 pound weakling beat the snot out of Superman.
Definitions
Powered-exoskeleton
A baseline Powered-exoskeleton is a human shaped external skeleton constructed of strong materials, with powerful electronic servomotors or hydraulic actuators replacing human muscles. There are many variants.
I made up these definitions all by myself. If you don't like them, feel free to make up your own.
OPERATOR (OPR:)
Human Being [Human]
Computer
Unintelligent software [Comp App]
Artificial Intelligence [Comp AI]
AMPLIFIER LOCATION (LOC:)
Operator Inside Amplifier [0]
Amplifier Inside Operator [-]
Operator Remote Controlling Amplifier [+]
CONTROLS (CTL)
Human Controls
Game Controller [Game]
Exoskeleton Motion-Capture system [Exo-Mocap]
Brain-Computer Interface [BCI]
Computer Controls
Digital Interface [DigInt] (computer just plugs into the man amplifier)
AMPLIFIER SIZE (SIZ)
Smaller Than Human Sized [0]
Human Sized [1]
Slightly Larger Than Human Sized [2]
Quite A Bit Larger Than Human Sized [3]
Outrageously Larger Than Human Sized [4]
COMBAT (COM)
Armored
None [A0] No combat armor, but non-gun combat enhancements (load carrying, sensors, etc.)
Partial [A½] Partial armor protection
Full [A1] Total armor coverage
Environment Suit [A2] Total Armor Coverage plus life support and CBRN defense
Integral Weapons [W:1]
or [NON] No combat armor, no combat enhancements, no integral weapons
The OPERATOR is the entity operating the man amplifier, either a person (OPR:Human) or a computer running either simplistic pre-programmed task software (i.e., a Roomba vacuum cleaner) or full-fledged AI software (i.e.,Ultron).
If the operator is a computer (OPR:Comp), the man amplifier is classified as a Robot. If the computer is running unintelligent software (OPR:Comp App) it is a Robot Appliance). If the computer is running Artificial Intelligence software (OPR:Comp AI) it is a Robot Synthetic Organism)
OPR:Human
Human Operator
OPR:Comp App or OPR:Comp AI
Operator is Computer either App or AI
The AMPLIFIER LOCATION is the location of the amplifier with respect to the Operator.
LOC:0 If the operator is inside the amplifier then it is an exoskeleton. Examples include Tony Stark wearing an Iron Man suit, Col. Quaritch driving an "AMP" suit, Raleigh and Mako in their Jaeger, or this is a self-contained Robot Appliance or Robot Synthetic Organism (Intel Inside)
LOC:- If the amplifier is surgically embedded inside the operator, then it is an endoskeleton and the amplifier is called a Cyborg. An example is the Six Million Dollar Man. This option does not make sense if the operator is a computer.
LOC:+ If the amplifier is remotely controlled at some distance from either the human or computer operator, then it is a Telerobotic Drone with only 3rd person visual feedback, such as an unmanned aerial vehicle or a waldo handling radioactive material. More extreme is a Telepresence Drone, with 1st person visual and haptic feedback in virtual reality.
LOC:0
Exoskeleton
Operator is inside the amplifier
LOC:-
Cyborg
Amplifier is inside the operator
LOC:+
Telepresence Drone
Amplifier is at some distance from operator
The CONTROLS are how the operator issues commands to the man amplifier.
A Game Gontroller (CTL:Game) is a joystick and a keyboard set up, a steering wheel with brakes and accelerator, or other manually operated controls.
An exoskeleton motion capture system (CTL:Exo-Mocap) is something attached to various portions of the operator's body to measure body motions, such as waldo hands, power gloves, or even a full-body frame. Instead of the operator using manual controls for the man amplifier, the operator moves their body naturally and the exo-mocap ensures that the man amplifier mimics the motion. This allows the operator to focus on the task at hand instead of wasting time fighting with the joystick.
An exo-mocap for human form fitting man amplifiers sometimes use negative feedback. Exo-mocap for huge man amplifiers or remote controlled drones sometimes use haptic feedback. This means the operator is suspended inside the exoskeleton, and the exoskeleton is forced to conform to the current position of the remote drone. This allows the operator to do things like climb stairs and feel when the drone has walked into a brick wall. For example, in the movie Pacific Rim, when the pilots walk, their feet are not actually on any flat surface. Instead the exo-mocap bits attached to their feet stop the motion (and hovering in the air) when the giant mecha's foot hits the ground.
A Brain—computer interface (CTL:BCI) uses electronics to directly communicate with the human brain in order to issue commands to the man amplifier. The operator just thinks their commands to the man amplifier. Sometimes the man amplifier can communicate back, with sensory information (or with enslaving thought control). Also known as mind-machine interface (MMI), brain—machine interface (BMI), or direct neural interface.
In the movie Pacific Rim, the Humongous Mecha each have not one, but two pilots who do synchronised piloting. This seemed like a pretty stupid idea to me, until I read this report. Apparently with a BCI, a single pilot has an accuracy of 67%, but dual pilots have an accuracy of 90%. Reaction times are halved. And momentary lapses of attention are not quite as fatal, since the other pilot is hopefully still on the job. The technical term is "collaborative BCI".
Sometimes the man amplifier also has "computerized reflexes", to automatically react common situations, e.g., tripping over an obstacle or unexpectedly coming under sniper fire. So even if the operator does not react to sniper, the computer reflexes in the amplifier can do the reacting instead.
A Digital Inteface (CTL:DigInt) is for Computer Apps or Computer AIs to control the man amplifier. Basically it is the wires (or WiFi box) and ports used to plug in the computer.
CTL:Game
Game Gontroller
CTL:Exo-Mocap
Exoskeleton motion capture system (in yellow)
Artwork by Larry S. Todd
CTL:BCI
Brain-computer interface
The AMPLIFIER SIZE is a rough indication of the relative size. Smaller that Human Size (SIZ:0) would be some sort of remote drone. Human Sized (SIZ:1) would be something like Tony Stark's Iron Man armor. Slightly to Quite A Bit Larger Than Human Sized (SIZ:2 to 3) are called Mini-Mecha. An example is Tony Stark's Hulk-Buster armor from Avengers: Age of Ultron. And Outrageously Larger Than Human Size (SIZ:4) are called Houmongous Mecha. They are more like skyscrapers, an example are the Jaegers from Pacific Rim.
SIZ:
COMBAT is a rough indication of military or other combat modification.
Armor is protection against hostile weapons.
None (COM:A0) is an absence of combat armor, but there might be other combat-related non-weapon enhancements (e.g., the ability to carry an increased loadout of ammo and supplies, combat sensors, heightened runnings speed, etc). Partial (COM:A½) means that only some of the amplifier is covered with armor. Both of these are called Combat Exoskeletons.
Full (COM:A1) means the amplifier is totally covered with armor. Enviroment Suit (COM:A2) means not only does it have total armor, but also life support (i.e., it is a space suit) and CBRN defense as well. Both of these are called Powered Armor.
Integral weapons (COM:W1) mean some weapons that are built into the amplifier, instead of being separate firearms being carried. An example is the "laser finger" found in The Forever War, with the ultimate "point-and-shoot" interface.
COM:NON means amplifier has zero armor, zero combat enhancements, and zero weapons
If there exists an A rating, a W rating, or both, the word "Combat" is prefixed to the name. For instance, an amplifier with OPR:Comp and W:Yes would be a Combat Robot.
COM:A0
No combat armor, but he can punch you into next week
Exoskeleton from Elysium
artwork by Aaron Beck
CTL:Exo-Mocap Scene is control cabin inside head of a Humongous Mecha. Black suits are exo-mocaps. The steel frames are the suspension frames. From Pacific Rim (2013)
CTL:Exo-Mocap Walk cycle for suspended exo-mocap. Note parts of suspension frame attached to shoes. From Pacific Rim (2013)
Man Amplifier: A more or less human sized powered-exoskeleton controlled by an internal exo-mocap with a human operator. In some cases the powered-exoskeleton and the exo-mocap are merged into a single unit. Generally the exo-mocap uses negative feadback. It is called a "man amplifier" because it literally amplifies the person's strength.
Definition: Prosthesis
Prosthesis: In this context, a Man Amplifier whose main purpose it to allow disabled persons to use their arms and/or legs.
Mecha: A larger than human sized powered-exoskeleton controlled by a human operator in an internal control cabin (generally in the Mecha's head or chest) via a game controller, exo-mocap, or BCI. If controlled by exo-mocap, usually has haptic feedback. According to TV Tropes tank-sized mecha are "Mini Mecha" and mecha which are several stories tall are "Humongous Mecha". As they put it, if the operator can be described as a "pilot" or "driver", then you have a Mini Mecha on your hands.
If COM: is anything but NON, then it is a Combat Mecha.
Teleroboticsaka "Drone" or "Remote": In this context, a man amplifier, powered armor, or mecha where the operator is not inside the machine, but instead is located at some distance using remote control. In other words if the LOC is + it is telerobotic, regardless of the other parameters.
If controlled by exo-mocap it almost invariably has haptic feedback. Most telerobotics in the real world and science fiction have human operators, but there are some controlled by computer apps and AIs.
If COM: is anything but NON, then it is a Combat Drone.
Cyborg: In this context, a Man Amplifier that is surgically embedded inside the human operator's body. Sometimes also includes other enhancements, such as sensors, life support gear, replacement organs, armor and weapons. Aka "bionics", "six million dollar man".
If COM: is anything but NON, then it is a Combat Cyborg.
Robot: A man amplifier, powered armor, or mecha where the operator is a computer.
OPR: Comp App are Robot Appliances, only capable of perform pre-programmed tasks and stealing jobs from automobile construction workers.
OPR: Comp AI are Robot Synthetic Organism; and are disturbing, Asimov's Four Laws of Robotics notwithstanding.
If COM: is anything but NON, then it is a Combat Robot.
Challenges
There are several challenges standing in the way of creating a useful man amplifier.
The primary difficulty is the power supply. The first Iron Man movie got that right, the most important invention of all was the "arc reactor", the miniature fusion reactor that supplies almost unlimited power. Real world man amplifiers use non-rechargeable primary cells, internal combustion engines, and electrochemical fuel cells. These can only power the amplifier for a few hours. For many applications the designers give up and tether the man amplifier to a huge power generator sitting on the ground via a power cable.
The material used to construct the exoskeleton is a problem. Aluminum is inexpensive, lightweight, does not stress the motors, and easy to mold. But if the operator is holding an automobile over their head and the aluminum decides to fold up like an accordion (i.e., "fail catastrophically in a high-load condition), the operator will be left feeling quite flat. There are safer but more expensive options like titanium and molded carbon-fiber plates.
The joint actuators (motors) are a problem. Hydraulics have the power and the accuracy, but are heavy due to the fluid-filled hoses and actuator cylinders, and tend to leak hydraulic fluid everywhere. Pneumatics are lighter but since gas is springy the accuracy suffers. Electronic servomotors are a better choice. They are more efficient and power-dense.
Joints are a problem. Human hips and shoulders are ball and socket joints, it is almost impossible to match all the possible human movements with an exoskeleton using single-axis hinges. This limits the operator's flexibility. An exoskeleton with external ball and socket joints have a problem with the series of joints being forced into misalignment. Using a hollow spherical ball joint that encloses the human joint is a better solution, but requires telescoping plates. And the problem of joints in the arms and legs are trivial compared to the nightmare of duplicating the human spine.
Power control and modulation are a problem. The actuators have to not move too fast, over shoot, or otherwise lag behind the operators movement.
Detection of unsafe motions is a problem. You do not want the man amplifier moving in such a way that it breaks the operator's arm, or damages another part of the exoskeleton.
Pinching and joint fouling is a problem. You do not want any part of the exoskeleton's hinges savagely pinching the skin of the operator, nor do you want environmental dust and grit getting into the joints.
A smaller but still difficult problem are the powered armor hands. Space suits have a similar problem: you need to make the various protective layers thin enough to be able to fit between adjacent fingers, and somehow fit miniature constant volume cuffs at each finger joint. NASA manage to design this, but the gloves still need some work. Astronauts using these to do prolonged work discovered that their fingernails would start to bleed, and sometimes would fall off.
Trying to fit plate armor and power motors in between adjacent fingers just makes the challenge even worse.
A common solution in science fiction is to make the powered armor hands to be waldoes. The human operator's hands are not actually inside the powered armor hands. Instead, they are in a hollow big enough to allow all finger movements, and the hand is held in a small exo-mocap. The powered hands are mounted just forwards of the human hands.
Operators hands are not actually inside the powered hands From Ogre (1977). Artwork by Winchell Chung (me). Concept art: rough sketch of waldo hand.
Bhargav Gajjar of Vishwa Robotics with a prototype Extensor hand for a deep-sea diving suit
Hands not inside the powered hands
Hands not inside the powered hands From "PoweredSuit Explination" (sic) NewType magazine May '85 (1985)
Note how human arms are actually inside secondary armlets sticking out of the mecha's sides, instead of being inside the mecha's arms Landmate from Appleseed
artwork and story by Masamune Shirow click for larger image
Yes, all you young whipper-snappers think that powered armor is the latest cool thing since the first Iron Man movie came out in 2008. Well, as it turns out, the concept goes a long ways back. Even Iron Man himself goes a ways back, he first appeared in a comic book called Tales of Suspense #39 in March 1963.
The concept of a powered fighting suit arguably dates back to E. E. "Doc" Smith's Children of the Lens (1947) with Kimball Kinnision's armored suit made of pure dureum a quarter of an inch thick. Doc Smith had armored suits back in 1937 with Galactic Patrol but those were not power-assisted. Later came Robert Heinlein's classic Starship Troopers (1959). In "Champion Robot" by E R James (1953), "Creakyfoot" is an eight foot high powered suit for use on farms and in factories. And before that, there were all sorts of bizarre patients for assisted walking/running machines powered by compressed air, wind-up springs, and steam.
Post 1960's powered armor will be covered in the subsequent sections.
The dureum inlay of the glove held, and glove and axe smashed together against the helmet. The Boskonian went down with a crash; but, beyond a broken arm or some such trifle, he wasn’t hurt much. And no armor that a man had to carry around could be made of solid dureum. Hence, Kinnison reversed his weapon and swung again, aiming carefully at a point between the inlay strips.
The Lensman landed, and made his way to Harkleroy’s inner office in what seemed to be an ordinary enough, if somewhat over-size, suit of light space-armor. But it was no more ordinary than it was light. It was a power-house, built of dureum a quarter of an inch thick. Kinnison was not walking in it; he was merely the engineer of a battery of two-thousand-horsepower motors. Unaided, he could not have lifted one leg of that armor off the ground.
Inch by inch, foot by foot, Kinnison fought his way back along the corpse-littered corridor. Under the ravening force of the attackers’ beams his defensive screens flared into pyrotechnic splendor, but they did not go down. Fierce-driven metallic slugs spanged and whanged against the unyielding dureum of his armor; but that, too, held.
Dureum is incredibly massive, unbelievably tough, unimaginably hard— against these qualities and against the thousands of horsepower driving that veritable tank and energizing its screens the zwilniks might just as well have been shining flashlights at him and throwing confetti. His immediate opponents could not touch him, but the Boskonians were bringing up reserves that he didn’t like a little bit; mobile projectors with whose energies even those screens could not cope.
Man Amplifier: A more or less human sized powered-exoskeleton controlled by an internal exo-mocap with a human operator. In some cases the powered-exoskeleton and the exo-mocap are merged into a single unit. Generally the exo-mocap uses negative feadback. It is called a "man amplifier" because it literally amplifies the person's strength.
Y-17 trauma override harness from game Fallout: New Vegas. This was designed for autonomous casualty recovery. When the soldier was wounded enough, the harness would "walk" the soldier back to the medical facilities. Horrifyingly they could malfunction, creating walking corpses that would shoot at anything that moved.
The General Motors Terrain Walker from The Warbots by Larry S. Todd, Galaxy Magazine Oct. 68 (1968). Technically this is a mecha.
The General Motors Terrain Walker from The Warbots by Larry S. Todd, Body Armor: 2000 (1986). Technically this is a mecha.
Originally developed for construction work and back-echelon pack horsing, the General Motors Terrain Walker was quickly accepted by the armies of America, Earth, when it was proved that the machine could carry a gun. Standing twelve feet tall and weighing eight tons, the Walker could stride down a highway at 30 mph and do 20 mph on rough terrain, such as burnt-out slums.
Nuclear powered, it required little servicing and often powered its weapons directly from its own power system. Great hydraulic pistons operated its arms and legs, which followed every movement made by the pilot. The pilot was strapped in a control cradle that translated every motion to the Walker, and he had a clear view fore and aft through a Plexiglas bubble.
The Walker was equipped with a wide range of sensory devices, among them snooper-scopes, radar, amplified hearing, some primitive smell-detection devices and tactile pads on the hands and feet, all of which were wired to the pilot.
The Walkers were instrumental in assisting in heavy construction. They rebuilt the foundations of cities, realigned the world's power conduits, built dams and, in one fierce burst of zealous activity, built almost a hundred thousand miles of beautiful roadway in four years.
Three years after that commercial aircars were produced in profusion. The new roads were ignored and slowly cracked while approaching obsolescence.
Man amplifiers augment the user's strength by monitoring the direction the user is moving their limbs and using engines to move the exoskeleton in the same direction, but with much more emphasis. That's what gives Iron Man his super-strength.
As previously mentioned, this is somewhat of an engineering challenge.
The technical name for the motors is "joint actuators", and they may or may not be electrical motors.
Hydraulics have the power and the accuracy. Drawbacks include how heavy the units are due to the fluid-filled hoses and actuator cylinders. They also have a regrettable tendency to leak hydraulic fluid all over the blasted place.
Pneumatics are lighter than hydraulics and are less prone to leak. The drawback is since gas is springy, the accuracy suffers. With hydraulics, the fact that the fluid is basically incompressible there ain't no spring at all so the accuracy is better.
Electronic servomotors are more efficient and power dense than either of the others. All they need are the motors and a power supply. Hyraulics and pneumatics need a power supply, the acutators, AND a separate system to generate, store, and transport pressurized air or fluid. The main drawback is they are much heavier than both and require more power.
PNEUMATICS 1
(ed note: in an effort to reduce size and mass, this innovative design not only uses Pneumatics for the joint acuators, it uses it for the exoskeleon as well)
Children with a rare neurological disease were recently given the chance to walk for the first time thanks to a new robotic exoskeleton. These devices – which are essentially robotic suits that give artificial movement to a user’s limbs – are set to become an increasingly common way of helping people who’ve lost the use of their legs to walk. But while today’s exoskeletons are mostly clumsy, heavy devices, new technology could make them much easier and more natural to use by creating a robotic skin.
Exoskeletons have been in development since the 1960s. The first one was a bulky set of legs and claw-like gloves reminiscent of the superhero, Iron Man, designed to use hydraulic power to help industrial workers lift hundreds of kilogrammes of weight. It didn’t work, but since then other designs for both the upper and lower body have successfully been used to increase people’s strength, help teach them to use their limbs again, or even as a way to interact with computers using touch or “haptic” feedback.
These devices usually consist of a chain of links and powered joints that align with the user’s own bones and joints. The links are strapped securely to the user’s limbs and when the powered joints are activated they cause their joints to flex. Control of the exoskeleton can be performed by a computer – for example if it is performing a physiotherapy routine – or by monitoring the electrical activity in the user’s muscles and then amplifying the force they are creating.
Heavy and painful
But despite half a century of research, exoskeletons still aren’t widely used. This is largely because they are usually very uncomfortable to wear for long periods of time, as individuals’ bodies differ from the one-size-fits-all structure of the suits. Some exoskeletons are designed to be adjusted to fit a user’s body better, but if the robotic joints and the user’s real joints don’t rotate in exactly the same position it can produce unnatural motion, causing discomfort or pain. This is made worse by the stiffness of each part of the suit.
Another problem, especially with upper-body exoskeletons, is how heavy they are, usually because of the strong materials needed to support the body weight and the powerful actuators that move the joints. Current suits also aren’t designed to cope with temperature changes or rain, which makes them difficult to use in the real world. And their appearance, which hasn’t been a primary concern of designers so far, can put people off.
Prototype soft exoskeleton glove. Steve Davis, Author provided
To make exoskeletons more practical and appealing, we need innovations to make them more like a “second skin” than a giant robotic suit. Exoskeletons typically use heavy electric motors, but lightweight actuators such as pneumatic muscles are now being considered. These can produce similar forces to electric motors but at a fraction of the weight. The muscles consist of a rubber bladder surrounded by a woven sleeve. When pressurised, they increase in diameter and contract in length, pulling the joint. They are made from lightweight materials but can generate the force needed to lift many hundreds of kilogrammes.
Soft robotics
However, even these lightweight actuators still need to be attached to a rigid mechanical structure mounted to the user’s body. Myself and my colleagues at the University of Salford’s Centre for Autonomous Systems and Robotics are developing another alternative: soft robotics. This technology uses physically soft advanced materials to carry out similar tasks to traditional rigid robotic devices. They are particularly well suited to interaction with humans as they are typically lightweight which means if they collide with a person they are unlikely to cause injury.
We recently developed a new “soft continuum actuator”, a joint that bends like an elephant’s trunk. Unlike a traditional rigid robot joint, if it encounters resistance in one part of its body it will still bend but at a different location elsewhere along its length. By equipping a skintight material suit with these actuators, we can create a soft exoskeleton that bends at the precise location of the wearer’s joints. This means the suit will fit a range of users comfortably without needing mechanical adjustment or calibration. Plus, the system is lightweight and can be worn like clothing rather than a bulky mechanical frame.
Exoskeletons are now starting to be sold commercially and we’ll probably see more of them in the coming years. In 2012, paralysed woman Claire Lomas even completed the London Marathon wearing one. But there are still significant engineering challenges to be addressed before we will see widespread use of these systems. For one thing, we need a way for people to power the suits without having to plug themselves in every half an hour.
Note the "Linear Armature" (flat) Motors to Mimic Motions of Specific Muscles
More conventional motors are at the elbows and knee joints Doctor Doom's Armor. From The Official Handbook of the Marvel Universe Vol. I issue 3 (1983).
Image scan from Eliot R. Brown Comically Technical blog
Ordinary man-amplification takes the strength and moving ability of an average person and magnifies it. Prosthetics are for physically challenged people who strength or mobility is weaker than average, or even absent. The man-amplification is to amplify their abilitys up to that of an average person.
The prosthetics are generally limited to the arms and/or legs. If the prosthetics are for internal organs, this becomes more a medical cyborg. Naturally the division between the two types is sort of fuzzy.
2 year old Emma was born with arthrogryposis multiplex congenita. The exoskeleton with resistance bands allow her to use her arms. (2012)
Sophie Morgan walks with the aid of "Rex", a Robotic Exoskeleton at the Welcome Trust on September 19, 2012 in London, England. The system allows wheelchair users including fully paralyzed people, to stand upright and walk independently. Sophie was paralyzed from the breast bone down in 2003 following a car accident. (2012)
In the role playing game Space Opera (1980), the Irsol live in free-fall star cities. They need exoskeletons in order to walk under ordinary gravity. Artwork by David C. Sutherland III
M.A.N.T.I.S. (1994). Being paraplegic, the protagonist required the suit even to walk, let alone be a superhero.
Novel A Spectre is Haunting Texas by Fritz Leiber (1969). Human beings who developed in microgravity environments were called "Thins." They require a Titanium Exoskeleton to function in Earth's gravity.
Magazine version "A Spectre is Haunting Texas" by Fritz Leiber (1968). Artwork by Jack Gaughan.
Actress Angel Giuffria was born missing the left arm below the elbow. She wears an arm from Advanced Arm Dynamics with a hand from Bebionic. It is controlled by myoelectric muscle signals. IMDB, Twitter, Instagram
click for larger images
SMA PROSTHETIC EXOSKELETON
The Spanish National Research Council (CSIC) recently unveiled a prototype of what it believes is the world’s first assistive exoskeleton designed to enhance mobility for children with the degenerative illness spinal muscular atrophy (SMA), a rare disease that affects 1 in 10,000 babies born in Spain.
The 26-pound device, made primarily of the lightweight metals aluminium and titanium, is designed to help children to walk, which in some cases will be for the first time. The exoskeleton will also be used as a physiotherapy device in hospitals to help prevent the effects associated with loss of mobility in SMA. Currently in the preclinical phase, the technology developed for the device has been patented and is licensed jointly by CSIC and its technology-based business unit, Marsi Bionics.
The exoskeleton’s architecture is built around long support rods, or orthoses, which are adjustable to snugly fit the child’s legs and torso. The joints are powered by a set of servo motors to mimic the effort of human muscles, providing the child with the necessary strength to stand upright and to walk. A series of sensors feed into an onboard computer to tracks the child’s steps in order to create the smoothest mechanical gait possible. The entire apparatus is outfitted with telescoping supports that allow the mechanism to adjust as a child grows in height. A movement controller and a battery providing five hours of life between recharges complete the engineering components.
“The number one drawback in developing this type of pediatric exoskeleton is that the symptoms of neuromuscular illnesses — such as spinal muscular atrophy — change over time, as much in the articulations as in the body,” said Elena Garcia, senior researcher at the CSIC/Politechnic University of Madrid’s Centre for Automation and Robotics, and founder of the spin-off Marsi Bionics, in a press release.
“That’s why it’s fundamental to have an exoskeleton capable of independently adapting to these changes. Our model includes intelligent joints which alter the brace’s rigidity automatically and adapt to the symptoms of each individual child whenever required,” she added.
The CSIC exoskeleton is designed for use by children between the ages of 3 and 14. The necessity of having five assistive motors in each leg to balance the standing child to help keep them up and active, all requiring space to function, restricts the minimum length of each leg, and the unpredictability of involuntary body movements typical of children younger than 3 obliged the researchers to set an age limit for the device. The Spanish National Research Council will continue working on finding ways to lighten and simplify the bulky device. In future versions for use with pathologies that don’t restrict joint movement — and therefore require fewer motors — a smaller frame device would be possible, García said.
García and her research and development team hope the exoskeleton helps SMA patients walk and thereby prevent spinal curvature — a typically side-to-side type of curvature called scoliosis — from setting in along with a chain of associated conditions caused by the inability to stand upright and walk.
The CSIC/Marsi Bionics exoskeleton project is being financed by the Spanish Ministry of the Economy and Competition, and through the European Union’s Echord++ program, with the help of medical specialists at the Sant Joan de Déu Children’s Hospital in Barcelona and the Ramón & Cajal University Hospital in Madrid.
But most Loonies never tried to leave The Rock—too risky for any bloke who’d been in Luna more than weeks. Computermen sent up to install Mike were on short-term bonus contracts—get job done fast before irreversible physiologlcal change marooned them four hundred thousand kilometers from home.
But despite two training tours I was not gung-ho computerman; higher maths are beyond me. Not really electronics engineer, nor physicist. May not have been best micromachinist in Luna and certainly wasn’t cybernetics psychologist.
But I knew more about all these than a specialist knows—I’m general specialist. Could relieve a cook and keep orders coming or field-repair your suit and get you back to airlock still breathing. Machines like me and I have something specialists don’t have: my left arm. You see, from elbow down I don’t have one. So I have a dozen left arms, each specialized, plus one that feels and looks like flesh. With proper left arm (number-three) and stereo loupe spectacles I could make untramicrominiature repairs that would save unhooking something and sending it Earthside to factory—for number-three has micromanipulators as fine as those used by neurosurgeons.
I wondered about his life expectancy. Tourists often remark on how polite everybody is in Luna—with unstated comment that ex-prison shouldn’t be so civilized. Having been Earthside and seen what they put up with, I know what they mean. But useless to tell them we are what we are because bad actors don’t live long—in Luna.
But had no intention of fighting no matter how new-chum this lad behaved; I simply thought about how his face would look if I brushed number-seven arm across his mouth.
And computerman-of-the-watch comes banging and ringing at door. I took my time answering and carried number-five arm in right hand with short wing bare; this makes some people sick and upsets almost everybody.
She asked how I felt. Told her I was right, just hungry. “Sister, did you see some prosthetic arms in our luggage?”
She had and I felt better with number-six in place. Had selected it and number-two and social arm as enough for trip. Number-two was presumably still in Complex; I hoped somebody was taking care of it. But number-six is most all-around useful arm; with it and social one I’d be okay.
But this time we were searched—and a recorder removed from my pouch.
I surrendered it without much fuss; was Japanese job supplied by Stu—to be surrendered. Number-six arm has recess intended for a power pack but near enough size of my mini-recorder. Didn’t need power that day—and most people, even hardened police officers, dislike to touch a prosthetic.
They were looking ... at a handsome, shapely, dramatic-featured man, eight feet eight inches tall and massing 147 pounds with and ninety-seven pounds without his exoskeleton. Except for relaxed tiny bulges of muscle in forearms and calves (latter to work lengthy toes, useful in gripping), this man was composed of skin, bones, ligaments, fasciae, narrow arteries and veins, nerves, small-size assorted inner organs, ghost muscles, and a big-domed skull with two lumps of jaw muscle. He was wearing a skintight black suit that left bare only his sunken-cheeked, deep-eyes, beautiful tragic face and big, heavy-tendoned hands.
This truly magnificent, romantically handsome, rather lean man was standing on two corrugated-soled titanium footplates. From the outer edge of each rose a narrow titanium T-beam that followed the line of his leg, with a joint (locked now) at the knee, up to another joint with a titanium pelvic girdle and shallow belly support. From the back of this girdle a T-spine rose to support a shoulder yoke and rib cage, all of the same metal. The rib cage was artistically slotted to save weight, so that curving strips followed the line of each of his very prominent ribs.
A continuation of his T-spine up the back of his neck in turn supported a snug, gleaming head basket that rose behind to curve over his shaven cranium, but in front was little more than a jaw shelf and two inward-curving cheekplates stopping just short of his somewhat rudimentary nose...
Slightly lighter T-beams than those for his legs reinforced his arms and housed in their terminal inches his telescoping canes. Numerous black, foam-padded bands attached his whole framework to him.
...Eight small electric motors at the principal joints worked the prosthetic framework by means of steel cables riding in the angles of the T-beams, much like antique dentist drills were worked, I've read. The motors were controlled by myoelectric impulses from his ghost muscles transmitted by sensitive pickups buried in the foam-padded bands.
I tongued pep, instant glucose, and antigrav pills out of their cheekplate container into my mouth. Even the tiny dissolving pellets seemed heavy as osmium on my tongue, and they dropped down my throat like bullets. I followed them with a sip of truly heavy water from my other cheekplate, tilting my exoskulled head to do so.
Iron Man's Armor. From The Official Handbook of the Marvel Universe Vol. I issue 5 (1983). Click for larger image.
Doctor Doom's Armor. From The Official Handbook of the Marvel Universe Vol. I issue 3 (1983).
Image scan from Eliot R. Brown Comically Technical blog
Click for larger image.
from INFANTRYMEN! INFANTRYMEN! by Ricardo Barreiro (1980)
artwork by Juan Giménez
Heavy Metal - September 1981 - p.24-33
from INFANTRYMEN! INFANTRYMEN! by Ricardo Barreiro (1980)
artwork by Juan Giménez
Heavy Metal - September 1981 - p.24-33
The point behind the story is that while the enemy troops are actually robots the human troops are pretty much robots as well, due to being controlled by electrodes in their brains. from INFANTRYMEN! INFANTRYMEN! by Ricardo Barreiro (1980)
artwork by Juan Giménez
Heavy Metal - September 1981 - p.24-33
from INFANTRYMEN! INFANTRYMEN! by Ricardo Barreiro (1980)
artwork by Juan Giménez
Heavy Metal - September 1981 - p.24-33
artwork by Masamune Shirow click for larger image
From "PoweredSuit Explination" (sic) NewType magazine May '85 (1985)
From "PoweredSuit Explination" (sic) NewType magazine May '85 (1985). Obviously inspired by the Cornell Aeronautical Labs Man-Amplifier
From Ogre (2012). Artwork by Winchell Chung (me). Art for the re-issued game.
From Ogre (1977). Artwork by Winchell Chung (me). Concept art: rough sketch of waldo hand.
From Ogre (1980). Artwork by Winchell Chung (me). Custom work for individual client.
From Ogre (1977). Artwork by Winchell Chung (me). Concept art.
From Ogre (1977). Artwork by Winchell Chung (me). Concept art.
From Ogre (1977). Artwork by Winchell Chung (me). Powered armor squad with GEV (armored hovercraft)
Artist unknown
Artist unknown
PITMAN
Designed as an "enhanced special forces capability for low intensity conflicts and counterterrorists". It was conceived at Los Alamos National Laboratory by Jeff Moore of Advanced Weapons Technology Group.
The operator is housed in a 500 Lbs fiberglass, polymer/ceramic composite armor called Body Armor, Powered (BAP). Pitman is capable of carrying 300 Lbs of equipment. BAP consists of six layers: (1) Impregnated antibacterial polypropylene; (2) Closed-cell foam laced with heating/cooling tubing; (3) Sealed, impermeable "condom" layer; (4) nitrogen- filled polyurethane bubble sensors; (5) energy absorbing closed-cell foam(6) laminated, composite armor. The exoskeleton frame and joints are lightweight graphite epoxy or Kevlar. Joint structure and kinematics are still unconceptualized at this time. Photoreactive polymer-gel muscles drive the joints. Protected from 0.50 caliber armor piercing rounds, laser, thermal, nuclear, chemical and biological weapons, this 500 Lbs suit appears weightless because the polymer-gel actuators counterbalance the weight. The operator views the environment through vibrating mirror virtual displays. Mounted over his head are C3i Antennae and sensor arrays. An Auxiliary Power Unit (APU)/battery/environmental control pack provides power and cooling/heating for operator comfort.
This design marks a departure from the use of traditional actuation and joint technology. More organic in nature, this monster blends with its operator in as seamless a mechanical interface as possible. Traditional joint technology used in Hardiman and even in the Man-Amplifier may be unsuitable. Actuator control is provided by the soldier's own brain and central nervous system augmented by computers. Lining each segment a sheet of nitrogen filled polyurethane sacs (similar to bubble wrap). In addition to providing cushioning, this material senses the operator's movements and generates signals that are processed for actuation. In the ultimate system magnetoencephalographic (MEG) sensors would monitor brain activity creating a phantom central nervous system to control the polymer muscles. Hydrogen/oxygen conducting polymer fuel cells supply the power.
Although still years into the future, the Army's interest has been piqued. No doubt in time this technology will become a reality as pursues bigger and better killing machines.
From ROBOT EVOLUTION: THE DEVELOPMENT OF ANTHROBOTICS by Mark Rosheim (1994)
SPACE ARMOR
(ed note: the antigravity starship city of New York has accepted a contract to build a technological infrastructure for the feudal planet called Heaven. Chris is a teenager who has been adopted by Sergent Anderson (his guardian), his friend Piggy Kingston-Throop is a disrespectful juvenile delinquent.)
Nothing could be seen of (planet called) Heaven from the air. As the city descended cautiously, the spindizzy field became completely outlined as a bubble of boiling black clouds, glaring with blue-green sheets and slashes of lightning, and awash with streams of sleet and rain. At lower altitude the sleet disappeared, but the rain increased; —
Amid the excitement of the storm Chris almost made the mistake of laughing at him; but at the same instant, he felt the boards of the ancient pier begin to shudder beneath them to the tramp of steel boots. Startled, he looked back over his shoulder, and then jumped up. Twenty men in full space armor were behind them, faceless and bristling, like a phalanx of giant robots. One of them came forward, making the planks of the pier groan and squeal under the weight, and suddenly spoke to him.
The voice was blarey and metallic, as though the gain had been turned up in order to shout across acres of ground and through cannonades of thunder, but Chris had no difficulty in recognizing it. The man in the armor was his guardian.
“CHRIS!” The volume of sound suddenly went down a little. “Chris, what are you doing here? And Kingston-Throop’s kid! Piggy, you ought to know better than this. We’re landing in twenty minutes—and this is a sally port. Beat it—both of you.”
“We were only looking,” Piggy said defiantly. “We can look if we want.”
“I’ve got no time to argue. Are you going or not?”
Chris pulled at Piggy’s elbow. “Come on, Piggy. What’s the sense of being in the way?”
“Let go. I’m not in the way. They can walk right by me. I don’t have to go just because he says so. He’s not my guardian—he’s only a cop.” A steel arm reached out, and steel pincers opened at the end of it. “Give me your card,” Anderson’s voice said harshly. “I’ll let you know later what you’re charged with. If you won’t move now, I’ll assign two men to move you—though I can’t spare the men, and when that winds up on your card you may spend the rest of one lifetime wishing it hadn’t.”
“Oh, all right. Don’t throw your weight around. I’m going.”
The bulbous steel arm remained stiffly extended, the pincers menacingly open. “I want the card.”
“I said I was going!”
“Then go.”
Piggy broke and ran. After a puzzled look at the armored figure of his guardian, Chris followed, dodging around and through the massive blue-steel statues standing impassively along almost the whole length of the pier.
(ed note: Chris tries to discover the terms of the city's contract with planet Heaven, by evesdroppoing on his guardians: Sergeant Anderson and his wife Carla)
Nevertheless, Chris picked up a few fragments, mostly from conversations between the sergeant and Carla:
“What they want us to do is to help them industrialize the planet. It sounds easy, but the kicker is that their social setup is feudal—the sixty-six thousand people they call the Elect are actually only free landholders or franklins, and below them there’s a huge number of serfs—nobody’s ever bothered to count them. The Archangels want it to stay that way even after they’ve got their heavy industries established.”
“It sounds impossible,” Carla said.
“It is impossible, as they’ll find out when we’ve finished the job. But that’s exactly the trouble. We’re not allowed to change planets’ social systems, but we can’t complete this contract without starting a revolution—a long, slow one, sure, but a revolution all the same. And when the (Earth) cops come here afterward and find that out, we’ll have a Violation to answer for.”
Between these eavesdroppings and the increasingly rare visits home of his guardian, Chris gradually built up a fuzzy picture of what the colonists seemed to want. As a citizen, he could have asked the City Fathers directly for the text of the contract, but access to this was denied to passengers (Chris is a passenger, until he turns 18 year old and only if he passes his citizenship exams). In general, however, he gathered that the Archangels proposed to establish an economy like that of Venus, complete with undersea farming and herding, with the aid of broadcast power of the kind that kept the city’s Tin Cabs in the air. The (New York) Okies were to do the excavating in the shifting, soaking terrain, and were to build the generator-transmitter station involved. They were also to use city facilities to refine the necessary power metals, chiefly thorium, of which Heaven had an abundance beyond its ability to process. After the economy , was revamped, the Archangels hoped to have their own refineries, and to sell the pure stuffs to other planets. Curiously, they also had enough germanium to be willing to pay for the job in this metal, although it too was notoriously difficult to refine; this was fortunate for them, since without any present interstellar trade, they were woefully short of Oc Dollars.
(ed note:Sergeant Anderson and Sergeant Dulany are kidnapped by a faction of the Archangels. Chris performs a complicated plan to try and locate and rescue them, but just winds up being captured himself. The are all being held at Castle Wolfwhip.)
They put him in the same cell with Anderson and Dulany. His guardian was appalled to see him—"Gods of all stars, Irish, now they’re snatching children!”—and then, after he had heard the story, thoroughly disgusted (because Chris' shenanigans are just making matters worse). Dulany, as usual, said very little, but he did not look exactly pleased.
“There’s probably a standard recognition signal you should have sent, except that you wouldn’t have known what it was,” Anderson said. “These petty barons did a lot of fighting among themselves before we got here—fleecing us is probably the first project they’ve been together on since this mudball was colonized.”
“Bluster” Dulany commented.
“Yes, it’s part of the feudal mores. Chris, those men in the boat are going to take a lot of ribbing from their peers, regardless of the fact that they were never in any danger and they had sense enough to let you spin your own noose. They’ll be likely to take it out on you when you’re taken out for questioning.”
“I’ve already been interviewed,” Chris said grimly. “And they did.”
“You have? Murder! There goes that one up the flue, Irish.”
“Complication,” Dulany agreed.
Anderson fell silent, leaving Chris to wonder what they had been talking about. Evidently they had been planning something which his news had torpedoed—though it was hard to imagine even the beginnings of such a plan, for their captors, out of a respect for the two Okies which Chris knew to be more than justified, had left them nothing but their underwear. At last the boy said hesitantly:
“What could I have done if my interview were still coming up?”
“Located our space suits,” Anderson said gloomily. “Not that they’d have let you search the place, that’s for sure, but you might have gotten a hint, or tricked them into dropping one. Even wary men sometimes underestimate youngsters. Now we’ll just have to think of something else.” “There are dozens of space suits, standing around the wall of that big audience chamber,” Chris said. “If you could only get there, maybe one of them would fit one of you.”
Dulany only smiled slightly. Anderson said: “Those aren’t suits, Chris; they’re armor—plate armor. Useless here, but they have some kind of heraldic significance; I think the Barons used to collect them from each other, like scalps.” “That may be,” Chris said stubbornly, “but there were at least two real suits there. I’m sure of that.”
The two sergeants looked at each other. “Is it possible—?“ Anderson said. “They’ve got the bravado for it, all right.”
“Could be,”
“By Sirius, there’s a bluff we’ve got to call! Get busy on that lock,Irish!”
“In my underwear? Nix.”
“What difference does that—oh, I see.” Anderson grimaced impatiently. “We’ll have to wait for lights out. Happily it won’t be long.”
“How are you going to bust the lock, Sergeant Dulany?” Chris asked. “It’s almost as big as my head!”
“Those are the easy kinds,” Dulany said loquaciously.
Okay, boy, stick your elbows out and we’ll fly you out to where there’s a floor you can walk on.
Chris in fact never did find out what Dulany did with the lock, for the operation was performed in the dark. Standing as instructed all the way to the back of the cell, he did not even hear anything until the huge, heavy door was thrown back with a thunderous crash.
The crash neatly drowned out the only yell the guard outside managed to get off. In this thunder-ridden fortress, nobody would think anything of such a noise. Then there was a jangle of keys, and two loud clicks as the unfortunate man was manacled with his own handcuffs. The Okies rolled him into the cell.
“What’ll I do if he comes to?” Chris whispered hoarsely.
“Won’t for hours,” Dulany’s voice said. “Shut the door. We’ll be back.”
From the boarding-squad sergeant, nine words all in one speech had the reassuring force of an oration. Chris grinned and shut the door. Nothing seemed to happen thereafter for hours, except that the thunder got louder. That was certainly no novelty on Heaven. But was it possible for even the heaviest thunderclap to shake a pile of stone as squat and massive as Castle Wolfwhip? Surely it couldn’t last long if that were the case—and yet it was obviously at least a century old, probably more. The fourth such blast answered his question. It was an explosion, and it was inside the building. In response, all the lights came on; and Chris saw that the door had been jarred open. When he went over to close it again, he found himself looking down a small precipice. The corridor floor had collapsed. Several stunned figures were sitting amid the rubble it had made on the story below it. Considering the size of the blocks of which it had been made, they were lucky that it hadn’t killed them. Still another explosion, and this time the lights went back out. Quite evidently, the suits Chris had seen in the audience hall had indeed been Anderson’s and Dulany’s battle dress. Well, this ought to cure the baron of Castle Wolfwhip of the habit of exhibiting his scalps. It ought to cure him of the habit of kidnapping Okies, too. It occurred to Chris that the whole plan of using Anderson and Dulany as hostages, even in their underwear, was about as safe an operation as trying to imprison two demons in a corncrib.
Then they were back. Seeing them hovering in the collapsed corridor, their helmet lamps making a shifting, confusing pattern of shadows, Chris realized, too, what kind of vehicle the city would have sent out after him if he had managed to get word back.
“You all right?” Anderson’s PA speaker demanded. “Good. Didn’t occur to me that the floor might go.”
They came into the cell. The guard, who had just recovered his senses, took one look and crawled into the corner farthest from the two steel figures.
“Now we’ve got a problem. We’ve got a safe-conduct out of the castle, but we can’t carry you through that storm, and we don’t dare risk putting you in one of theii suits.”
“Boat,” Dulany said, pointing at Chris.
“That’s right, I forgot, he knows how to drive one. Okay, boy, stick your elbows out and we’ll fly you out to where there’s a floor you can walk on. Irish, let’s go.”
Some people would raise powered armor as the solution to this problem. After all, if an infantryman can be given the firepower of a vehicle, there is no need for vehicles. The problem with that is that there is virtually no reason to expect that practical powered armor will be developed in the PMF (Plausible Mid-Future).
First, we must define powered armor. Powered armor is a suit that provides the infantryman with greater strength and protection than an unarmored infantryman while not interfering with his function as an infantryman. The last part is critical. The armored infantryman must still be able to do the jobs required of infantry, such as clearing buildings and going up stairs. This in turn sets size and weight limits on the armor. Current OSHA guidelines state that the design load for stairs is 510 lb. Even assuming that all of that limit is available (ignoring things like old or rotten stairs, or stairs not built to code), an average combat-loaded modern infantryman (sans armor) still weighs approximately 225 lb., leaving 285 lb. available for the armor. This number includes not only the armor itself, but also all of the various servos and power supplies necessary to run it. As an example, the Lockheed HULC currently weighs 53 lb. without batteries and can carry about 200 lb. However, it is only a lower-body system and must include its own structure, so given various developments, a total of 50 lb. for the entire power/servo system does not seem entirely out of the realm of possibility. This leaves 235 lb. for armor. Taking as a baseline current ESAPI (Enhanced Small Arms Protective Insert) plates, this translates to about 35 square feet of armor or 3.2 m2.
A typical adult male has a surface area of 1.9 m2, so this is a vaguely practical number for armor area once all the other stuff under the armor is taken into account. The ESAPI plates are rated to resist WWII-vintage M2 .30 caliber armor-piercing rounds, but only when backed by the various plate carrier vests. This means that the total surface area available would have to drop again, which in turn reduces the practicality of the system. Even then, more modern 7.62 mm AP ammo would likely be able to defeat it, although solid information on this is difficult to find. At one point, rifles in this caliber were standard-issue, and could be again if a need (such as defeating targets in powered armor) was there. Such an evolution of weapons to counter increased armor has happened before. In the 1500s, the standard gunpowder weapon was called an arquebus, and it was incapable of penetrating the increasing thicknesses of armor being worn on the battlefield. A heavier gunpowder weapon, called the musket, was developed to defeat such armor. Muskets made armor more or less obsolete, and once they had done that, they shrank to the size of the arquebus, absorbing it in the process.
Dalek
Increasing the weight of armor protection to defeat such threats moves the armor out of the category of “powered armor” and into the realm of “small vehicle”, which has the side-effect of removing the operator from the infantry. As a friend of the author’s said “if you plan on having your infantry armed like tanks, and armoured like tanks, you shouldn't be surprised that they weigh as much as tanks.” The small vehicles that would result have no parallel in modern warfare, casting doubt on their utility, and even if they were to prove useful, it is likely that they would not look like powered armor, due to the complex actuators and control systems required of such armor. A small tracked or wheeled vehicle with a turret would be much more efficient, although it has been pointed out that it might also look quite a lot like a Dalek.
All of the above analysis assumes modern armor and weapons, and the assumption for application to the PMF is that the balance between armor and weapons will remain more or less constant. This could obviously be flawed, but even if armor increases in power relative to weapons, the weapons used will be tailored to deal with the threat. Small (~25 mm), low-power weapons that fire shaped charges would probably be effective if all else fails, absent special authorial pleading.
The above is a best-case analysis. There are likely to be other complications from powered armor, such as reduced mobility (a problem in urban combat), increased ground pressure (a problem anywhere there is mud), increased logistics burden (a problem anywhere) and the fact that not all steps are built to OSHA specs. The combat load of a soldier will also likely increase, and the number used above was for a basic rifleman only. Grenadiers in the study referenced carried an extra 8.5 lb, and SAW gunners an extra 16 lb, to say nothing of the heavy weapons personnel, or even personnel who are simply heavier than average. Add to this the fact that powered armor, both in fiction and in real life, is often touted as not only protecting the soldier, but also increasing his carrying capacity. All of these combine to render powered armor a dubious proposition. This is not to say that exoskeletons will not be useful for increasing the carrying capacity of soldiers, or that powered armor might not have a role in peacekeeping/counterinsurgency operations, where the enemy does not have access to modern weapons. The problems of reliability and maintenance will also be major issues for a force that relies so much on very high-tech equipment. Without real-world experience, it is difficult to determine how much maintenance powered armor would require, but even the most basic powered armor will be very complex compared to virtually all systems the infantry use today. This is not a good thing when the system will be exposed to dirt, mud, debris, insufficient maintenance, and near-continuous use. This in turn indicates that additional maintenance facilities above and beyond what is standard today will have to be dropped with the unit, exposing them to the orbital defenses.
An M.I. lives by his suit the way a K-9 man lives by and with and on his doggie partner. Powered armor is one-half the reason we call ourselves "mobile infantry" instead of just "infantry." (The other half are the spaceships that drop us and the capsules we drop in.) Our suits give us better eyes, better ears, stronger backs (to carry heavier weapons and more ammo), better legs, more intelligence ("intelligence" in the military meaning; a man in a suit can be just as stupid as anybody else only he had better not be), more firepower, greater endurance, less vulnerability.
A suit isn't a space suit—although it can serve as one. It is not primarily armor—although the Knights of the Round Table were not armored as well as we are. It isn't a tank—but a single M.I. private could take on a squadron of those things and knock them off unassisted if anybody was silly enough to put tanks against M.I. A suit is not a ship but it can fly, a little; on the other hand neither spaceships nor atmosphere craft can fight against a man in a suit except by saturation bombing of the area he is in (like burning down a house to get one flea!). Contrariwise we can do many things that no ship—air, submersible, or space—can do.
No need to describe what it looks like, since it has been pictured so often. Suited up, you look like a big steel gorilla, armed with gorilla-sized weapons.
But the suits are considerably stronger than a gorilla. If an M.I. in a suit swapped hugs with a gorilla, the gorilla would be dead, crushed; the M.I. and the suit wouldn't be mussed.
The "muscles," the pseudo-musculature, get all the publicity but it's the control of all that power which merits it. The real genius in the design is that you don't have to control the suit; you just wear it, like your clothes, like skin. Any sort of ship you have to learn to pilot; it takes a long time, a new full set of reflexes, a different and artificial way of thinking. Even riding a bicycle demands an acquired skill, very different from walking, whereas a spaceship oh, brother! I won't live that long. Spaceships are for acrobats who are also mathematicians.
But a suit you just wear.
Two thousand pounds of it, maybe, in full kit—yet the very first time you are fitted into one you can immediately walk, run, jump, lie down, pick up an egg without breaking it (that takes a trifle of practice, but anything improves with practice), dance a jig (if you can dance a jig, that is, without a suit)—and jump right over the house next door and come down to a feather landing.
But here is how it works, minus the diagrams. The inside of the suit is a mass of pressure receptors, hundreds of them. You push with the heel of your hand; the suit feels it, amplifies it, pushes with you to take the pressure off the receptors that gave the order to push. That's confusing, but negative feedback is always a confusing idea the first time, even though your body has been doing it ever since you quit kicking helplessly as a baby. Young children are still learning it; that's why they are clumsy. Adolescents and adults do it without knowing they ever learned it—and a man with Parkinson's disease has damaged his circuits for it.
The suit has feedback which causes it to match any motion you make, exactly—but with great force.
Controlled force ... force controlled without your having to think about it. You jump, that heavy suit jumps, but higher than you can jump in your skin. Jump really hard and the suit's jets cut in, amplifying what the suit's leg "muscles" did, giving you a three-jet shove, the axis of pressure of which passes through your center of mass. So you jump over that house next door. Which makes you come down as fast as you went up ... which the suit notes through your proximity & closing gear (a sort of simple-minded radar resembling a proximity fuse) and therefore cuts in the jets again just the right amount to cushion your landing without your having to think about it.
And that is the beauty of a powered suit: you don't have to think about it. You don't have to drive it, fly it, conn it, operate it; you just wear it and it takes its orders directly from your muscles and does for you what your muscles are trying to do. This leaves you with your whole mind free to handle your weapons and notice what is going on around you ... which is supremely important to an infantryman who wants to die in bed. If you load a mud foot down with a lot of gadgets that he has to watch, somebody a lot more simply equipped—say with a stone ax—will sneak up and bash his head in while he is trying to read a vernier.
Your "eyes" and your "ears" are rigged to help you without cluttering up your attention, too. Say you have three audio circuits, common in a marauder suit. The frequency control to maintain tactical security is very complex, at least two frequencies for each circuit both of which are necessary for any signal at all and each of which wobbles under the control of a cesium clock timed to a micromicrosecond with the other end—but all this is no problem of yours. You want circuit A to your squad leader, you bite down once—for circuit B, bite down twice—and so on. The mike is taped to your throat, the plugs are in your ears and can't be jarred out; just talk. Besides that, outside mikes on each side of your helmet give you binaural hearing for your immediate surroundings just as if your head were bare—or you can suppress any noisy neighbors and not miss what your platoon leader is saying simply by turning your head.
Since your head is the one part of your body not involved in the pressure receptors controlling the suit's muscles, you use your head—your jaw muscles, your chin, your neck—to switch things for you and thereby leave your hands free to fight. A chin plate handles all visual displays the way the jaw switch handles the audios. All displays are thrown on a mirror in front of your forehead from where the work is actually going on above and back of your head. All this helmet gear makes you look like a hydrocephalic gorilla but, with luck, the enemy won't live long enough to be offended by your appearance, and it is a very convenient arrangement; you can flip through your several types of radar displays quicker than you can change channels to avoid a commercial—catch a range & bearing, locate your boss, check your flank men, whatever.
If you toss your head like a horse bothered by a fly, your infrared snoopers go up on your forehead—toss it again, they come down. If you let go of your rocket launcher, the suit snaps it back until you need it again. No point in discussing water nipples, air supply, gyros, etc.—the point to all the arrangements is the same: to leave you free to follow your trade, slaughter.
But, in general, powered armor doesn't require practice; it simply does it for you, just the way you were doing it, only better. All but one thing—you can't scratch where it itches. If I ever find a suit that will let me scratch between my shoulder blades, I'll marry it.
There are three main types of M.I. armor: marauder, command, and scout. Scout suits are very fast and very long-range, but lightly armed. Command suits are heavy on go juice and jump juice, are fast and can jump high; they have three times as much comm & radar gear as other suits, and a dead-reckoning tracker, inertial. Marauders are for those guys in ranks with the sleepy look—the executioners.
(ed note: this was written before Pluto's moon Charon was discovered. In the novel Charon is an imaginary planet about twice as far from the Sun as Pluto is. It is cold enough to make Pluto seem like Miami Beach.)
"Now I know you got lectured back on Earth on what a fighting suit can do." The armorer was a small man, partially bald, with no insignia of rank on his coveralls. Sergeant Cortez had told us to call him "sir," since he was a lieutenant.
"But I'd like to reinforce a couple of points, maybe add some things your instructors Earthside weren't clear about or couldn't know. Your First Sergeant was kind enough to consent to being my visual aid. Sergeant?"
Coitez slipped out of his coveralls and came up to the little raised platform where a fighting suit was standing, popped open like a man-shaped clam. He backed into it and slipped his arms into the rigid sleeves. There was a click and the thing swung shut with a sigh. It was bright green with CORTEZ stenciled in white letters on the helmet.
"Camouflage, Sergeant." The green faded to white, then dirty gray. "This is good camouflage for Charon and most of your portal planets," said Cortez, as if from a deep well. "But there are several other combinations available." The gray dappled and brightened to a combination of greens and browns: "Jungle." Then smoothed out to a hard light ochre: "Desert." Dark brown, darker, to a deep flat black: "Night or space."
"Very good, Sergeant To my knowledge, this is the only feature of the suit that was perfected after your training. The control is around your left wrist and is admittedly awkward. But once you find the right combination, it's easy to lock in.
"Now, you didn't get much in-suit training Earthside. We didn't want you to get used to using the thing in a friendly environment. The fighting suit is the deadliest personal weapon ever built, and with no weapon is it easier for the user to kill himself through carelessness. Turn around, Sergeant.
"Case in point." He tapped a large square protuberance between the shoulders. "Exhaust fins. As you know, the suit tries to keep you at a comfortable temperature no matter what the weather's like outside. The material of the suit is as near to a perfect insulator as we could get, consistent with mechanical demands. Therefore, these fins get hot—especially hot, compared to darkside temperatures—as they bleed off the body's heat.
"All you have to do is lean up against a boulder of frozen gas; there's lots of it around. The gas will sublime off faster than it can escape from the fins; in escaping, it will push against the surrounding 'ice' and fracture it... and in about one-hundredth of a second, you have the equivalent of a hand grenade going off right below your neck. You'll never feel a thing.
"Variations on this theme have killed eleven people in the past two months. And they were just building a bunch of huts.
"I assume you know how easily the waldo capabilities can kill you or your companions. Anybody want to shake hands with the sergeant?" He paused, then stepped over and clasped his glove. "He's had lots of practice. Until you have, be extremely careful. You might scratch an itch and wind up breaking your back. Remember, semi-logarithmic response: two pounds' pressure exerts five pounds' force; three pounds' gives ten; four pounds', twenty-three; five pounds', forty-seven. Most of you can muster up a grip of well over a hundred pounds. Theoretically, you could rip a steel girder in two with that, amplified. Actually, you'd destroy the material of your gloves and, at least on Charon, die very quickly. It'd be a race between decompression and flash-freezing. You'd die no matter which won.
"The leg waldos are also dangerous, even though the amplification is less extreme. Until you're really skilled, don't try to run, or jump. You're likely to trip, and that means you're likely to die."
"Charon' s gravity is three-fourths of Earth normal, so it's not too bad. But on a really small world, like Luna, you could take a running jump and not come down for twenty minutes, just keep sailing over the horizon. Maybe bash into a mountain at eighty meters per second. On a small asteroid, it'd be no trick at all to run up to escape velocity and be off on an informal tour of intergalactic space. It's a slow way to travel.
"Tomorrow morning, we'll start teaching you how to stay alive inside this infernal machine.
The suit was fairly comfortable, but it gave you the odd feeling of simultaneously being a marionette and a puppeteer. You apply the impulse to move your leg and the suit picks it up and magnifies it and moves your leg for you.
"Now everybody pay close attention. I'm going out to that blue slab of ice"—it was a big one, about twenty meters away—"and show you something that you'd better know if you want to stay alive."
He walked out in a dozen confident steps. "First I have to heat up a rock—filters down." I squeezed the stud under my armpit and the filter slid into place over my image converter. The captain pointed his (laser) finger at a black rock the size of a basketball, and gave it a short burst. The glare rolled a long shadow of the captain over us and beyond. The rock shattered into a pile of hazy splinters.
"It doesn't take long for these to cool down." He stopped and picked up a piece. "This one is probably twenty or twenty-five degrees (Kelvin). Watch." He tossed the "warm" rock onto the ice slab. It skittered around in a crazy pattern and shot off the side. He tossed another one, and it did the same.
"As you know, you are not quite perfectly insulated. These rocks are about the temperature of the soles of your boots. If you try to stand on a slab of hydrogen, the same thing will happen to you. Except that the rock is already dead.
"The reason for this behavior is that the rock makes a slick interface with the ice—a little puddle of liquid hydrogen—and rides a few molecules above the liquid on a cushion of hydrogen vapor. This makes the rock or you a frictionless bearing as far as the ice is concerned, and you can't stand up without any friction under your boots.
"After you have lived in your suit for a month or so you should be able to survive falling down, but right now you just don't know enough. Watch."
The captain flexed and hopped up onto the slab. His feet shot out from under him and he twisted around in midair, landing on hands and knees. He slipped off and stood on the ground.
"The idea is to keep your exhaust tins from making contact with the frozen gas. Compared to the ice they are as hot as a blast furnace, and contact with any weight behind it will result in an explosion."
The suit is set up to save as much of your body as possible. If you lose part of an arm or a leg, one of sixteen razor-sharp irises closes around your limb with the force of a hydraulic press, snipping it off neatly and sealing the suit before you can die of explosive decompression. Then "trauma maintenance" cauterizes the stump, replaces lost blood, and fills you full of happy-juice and No-shock. So you will either die happy or, if your comrades go on to win the battle, eventually be carried back up to the ship's aid station.
So let’s talk about the M70 Havoc combat exoskeleton, the current standard wear of the Heavy Legions. (Which is a combat exoskeleton because it’s descended from a long line of ancestors including, up front, civilian models used for construction, rescue, and so forth. It’s also fully-sealed powered armor, but then, so’s the N45 Garrex.)
Well, it’s big. It looks like a giant, stocky, barrel-bodied, dome-headed, no-necked humanoid with a back-sized hump, with weapons to match strapped to it. (And sort of as if it might overbalance backwards; it won’t, the gearing is much better than that and the armor is heavier in front to counterbalance, but the size of the powerplant and the auxiliary systems it’s carrying back there do create that impression, somewhat.) What it is, is basically a walking tank with interchangeable modular heavy-weapon packs that let it blast away on the battlefield, punch out small buildings, throw respectably-sized vehicles, dance a merry jig amid venting plasma, and toss around nuclear grenades at close range.
Operator
The wearer/operator goes in the front. The whole body opens up at the front, hydraulically, forward and up; the legionary climbs in backwards, then sticks his head up into the helmet and arms into the sleeves; then it closes again. The sleeves are internal to the body, not inside the arms of the suit; you can’t wear a suit that much bigger than you without risking tearing your arms off with every maneuver. Technically, when you’re fighting in a Havoc, you’re doing so with your arms at your sides, slightly bent, resting on the emergency hand controllers and keypads.
Those are only for emergency backup control, though. For primary control — if you’re wearing the suit right, the command torc built into the base of the helmet is resting right up against the back of your neck and the virtuality laser-port they installed in there, if you didn’t have one already, about halfway through basic, and has already established a high-bandwidth data connection with your brain. The moment you go active, you’re no longer wearing the suit and moving it about like a marionette; you are the suit, and moving it like your own body.
(Given its radically different capabilities, of course, this can be tricky to learn. That’s why they spend months teaching you Piston-Driven Fist Style martial arts, designed for these things, before letting you get anywhere near a combat exoskeleton for real; it’s also why an active-service heavy legionary is easy to spot on the street, because his gait will always be that little bit off.)
What they’re wearing in there is a very similar silk organza-type body glove to the one worn under regular combat armor; and exactly like its counterpart, it’s woven through with internal networking and environmental control and medical systems, capable of self-sealing, closing wounds, dispensing emergency pharmaceuticals, and covering everything in NBCN decontamination foam if penetrations are detected. The main difference here is that it can get hot in there; the Havoc bodysuit includes sweat-removal facilities (which filter water removed for the drinking reservoir) and Peltier cooling, run off the main power systems. This, and the legionary wearing it, fit tightly into the suit’s internal gel-filled padded sleeve that cushions them against acceleration and shock.
Power
Naturally, all of this uses a lot of power. A lot of power. This is buffered through distributed superconducting-loop accumulators throughout the exoskeleton, but while they do provide enough power to let you keep moving for a while if you lose the main power plant, they aren’t really enough to actually fight it. For that, you need something that can generate the necessary power.
Ordinarily, they might solve that problem with an antimatter (except that’s not good stuff to keep around where people might be shooting at it) or fusion reactor (except they involve lots of auxiliary machinery to keep the reaction sustained, which also makes it stop working fairly readily when people shoot at it). To bypass those problems, they reached back a little in history, and what’s under the small of this suit’s back is a good old-fashioned micro-fission reactor, of the thorium molten-salt design (which is to say, tasty “hot soup”). This is much more resilient under fire — although if someone does manage to penetrate the armor and crack the flask, it does have the minor disadvantage of spraying highly radioactive heavy-metal fluoride vapor over the landscape. But you can’t have everything.
Sensors and Communications
Core sensors and communications are essentially identical to light-legionary combat armor; radio and whisker laser communications, access to the OTP-encrypted military mesh, threat identification systems, teamware and C3I systems integration, thermal imaging, remote sensor access, 360 degree sensing, etc., etc. It also incorporates the sound transmission and imaging systems, which are even more important in the case of the Havoc, since its “helmet” is a sealed armor-dome with no direct vision possible; all internal displays are produced by the battle computer. The internal computer is rather more powerful than that included in, say, the N45 Garrex, both to run the more complicated systems and to act as a more major node in the battle ‘mesh.
On top of this, the Havoc adds pulsed-usage radar and lidar systems, plus integral T-ray high-frequency snoopers, powered by its greater reactor capacity, and a full ECM suite.
Structure, Strength and Armor
In construction terms, outside the padded sleeve is the diamondoid-composite skeleton of the suit, a honeycomb-patterned framework to provide the basic structural strength of the armor. This includes the attachment points and channels for the “muscles” — pseudo-organic structures capable of changing length on electrical signal — which power the suit. (In conjunction, yes, with the stabilization gyros.) They’re calibrated for high strength, speed, and flexibility; a Havoc is designed to let its wearer run at 54 mph and lift over a ton within safe tolerances — while still being able to dance a jig and pick up an egg without breaking it.
This skeleton is environmentally sealed and environment-controlled, for NBCN protection and exotic atmosphere/vacuum use, able to withstand and operate within several hundred atmospheres of pressure and extreme temperatures. Also at this level, all the working portions of suit equipment (computers, sensors, life support, medical support, power distribution, etc.) are located and secured in place. All of these systems are spread out throughout the skeleton, constructed from highly redundant circuitry with automatic re-routing, so that even with heavy damage, it can still function. It also includes mounting voids for heavier subsystems, such as the power reactor, external hives, and modular weapons pack.
The armor on top of this is qualitatively similar to light infantry armor — a sandwich of interlinked, highly corrosion-resistant and refractory cerametal composite armor plates around electrical and thermal superconductor meshes, with an outer anti-energetic ablative layer sprayed atop it. There’s just a lot more of it, quantitatively speaking, in thick, overlapping slabs. Likewise, the Havoc comes with rather more kinetic barrier emitters than light legionary armor, and thanks to its thorium reactor, has a lot more power available to back them up with. Finally, some portions of the armor include reactive sections, capable of exploding outward to neutralize force from external explosions or impacting projectiles (or, occasionally, long drops), in deference to the fact that large anti-materiel weapons are fired at heavy legionaries with depressing regularity.
There are, generally, no chameleonic or “stealth” features included — and the heavy legionary exoskeleton does not come in any “scout” variants — since the thermal — heat has to be radiated! — et. al., signature produced by the reactor and other exoskeletal systems are more than enough to vitiate attempts at stealth. On the other hand, it is equipped with the abovementioned ECM and signature-scrambling systems to confuse incoming guided missiles out of perfect target locks.
Flight
The Havoc can also fly, at up to several hundred mph depending on local conditions, using a combination of the same vector-control trickery used in standard combat armor, and of using its power reactor to provide the working heat to nuclear-thermal thrusters. (This is normally only an option in atmosphere, which functions as the supply of working fluid; in vacuum, it requires carting a big clip-on tank of remass around with you, which is less than convenient most of the time.) As in the former case, using this for extended flight is discouraged since it makes you an easy kill for air vehicles; on the other hand, it’s great for attaining position, making short skips, and so forth, not to mention extended low ground-skims. Attempting combat parkour with it is possible, but do bear in mind the strength of whatever it is you plan to bounce off of in the process; smashing right through it is often tactically awkward in combat situations.
Integral Weapons & Point Defense
In addition to weapons supplied by the modular pack, the Havoc possesses four integral weapons systems. Two of these are inbuilt to the arms of the suit: on the right, a heavy carbine equivalent to a tribarrel version of the IL-15i Battlesystem‘s carbine section, for routine anti-personnel and light anti-materiel use, and on the left, the KF-15 Dragonspume anti-nanitic/area-denial flamer, serving essentially the same purposes as they do for the light legionary only more so. The EI-12d Valkyrie target designator is built into the helmet section of the Havoc, for use in designating targets for the tactical net and ortillery, etc.
The fourth is a collection of defensive weaponry: each shoulder bears a point-defense pack, consisting of a pair of short-range lasers (designed to cause spontaneous explosion or vaporization-induced deflection) and a pair of short-range autocannon, independently and automatically targeting incoming fire for destruction.
The Havoc also carries an exoskeleton combat knife, which resembles a large hanrian — too heavy for unaugmented sophonts to use — scaled to the exoskeleton, which can be picked up and wielded by its manipulators for use primarily as a utility blade, although melee combat usage isn’t entirely unknown.
Swarms and their Hives
The Havoc also comes with swarm hives, both internal and external, housing microbot/nanobot swarms. The internal hive(s) are integrated into the structural honeycomb, housing repair and medical ‘bots whose purpose is to crawl around the interior of the suit ensuring that it self-repairs, and even more importantly, it keeps its operator in good repair.
The external hives, on the other hand, are a reflection of the Legions’ belief in really close air support. The exact mix can be varied by pre-mission module swap-outs, but a typical default mix for the external hives (the M-823 Horde) is a roughly equal mix of eyeballs, shrikes, gremlins, and balefire — which is to say, of expendable recon assets, counter-swarm swarms, anti-machinery swarms, and anti-personnel/area-denial carbon-devourer swarms.
Modular Weapons Pack
The primary weapons of the heavy legionary, however, are those supplied by the modular weapons pack: again, selected according to mission. The modular weapons pack fits onto the upper rear of the exoskeleton, beneath the armor and behind the helmet, with hardened lines running to extended firing packages which clamp onto the suit’s arms. A typical “mixed-mission” modular weapons pack would be the BP-400 Conflagration, which adds to the integrated loadout the following:
An arm-mounted heavy tribarrel sluggun, a larger-bore version of that included in the IL-15i Battlesystem, capable of firing larger (1.5″) versions of all its different ammo types: anti-materiel spikes, flechette canister shot, bore-compatible grenades, or gyroc micromissiles, the latter of which can include as their payload exploding shells, incendiaries and napalm, cryoburn shells, nanoweapons (if someone’s set up a microwave power system for them), chemical/gas dispensers, cyberswarm dispensers, network node — or spy dust — dispensers, injector needles (at low power), restraint nanoglop, electroshock “stunner” shells, acid globs, anti-electronic fiberdust, mollynet, antimatter nuke-in-a-bullets, etc., etc. Naturally, the weapons pack can store plentiful supplies of multiple types, and switch between them on the fly. (One that they’re particularly fond of is the infamous “backscratcher”, which travels a short distance and then blasts flechettes back down at the firer, rattling harmlessly off the heavy armor but making a real mess out of any lighter infantry trying to attack it close up.)
A chemical/nanoweapons dispensing system, with storage tanks for same.
A backpack vertical-launch system for a half-dozen minimissiles, usually supplied with 0.1 kt microfusion warheads.
Drones
Like the light legionary, the heavy legionary is accompanied by and acting as the command nexus for a half-dozen AI combat drones, in this case usually mixed from the WMH-4 Octoscorp, the WMH-7 Grizzly, and the WMH-12 Skyorca, depending on mission parameters, each heavily armed in its own right. When not commanded otherwise, these too default to acting as defense platforms — but the best defense is a good offense, right?
Transportation?
Like the light infantry, the heavy infantry is usually delivered to the field by the G5-TT Corvee tactical transport, fulfilling its multipurpose role. The module used for heavy legionary transport, however, is somewhat different — it’s an open frame, and the legionaries ride on the outside, held in by suit-controlled magnetic clamps, the Havoc already being heavily armored enough. The weight savings permit systems to let them refuel and rearm in flight to be added instead of all that wasteful hull.
They don’t generally use IFVs/APCs to get around on the battlefield. A platform like this doesn’t need ‘em.
He leaped clear of the drop boat as it burned around him, landing pack flaring. Six meters above the ground he cut the pack free and dropped, taking the shock of the landing in his armored legs and going with it into a forward tuck-and-roll meant to throw off any targeting gunners. But the drop boat was still drawing the Mishimans' defensive fire; it slewed away clumsily in a flare of jets and steaming ablative as laser fire and missiles broke it open and dropped it flaming to the pocked tarmac of the port. There was no going home now, not unless they won time enough to carve out and hold a secure pickup zone, but Hallorhan wasn't thinking about retreat. Specials weren't supposed to. The platoon was moving out, thirty-six heavy-metal thunder-rapers psyched on gung-ho speeches, firepower, and high-mike bouncers, and he was supposed to be moving out with them. That was all he had to worry about.
He leaped, current flowing from his enerpacs through the striated "muscle" tissues of his symbioplast armor. The pseudoliving plastic flexed to match the input action of thighs and calves and arching back; alloyed exoskeletal hinges supported organic joints that would have been torn in half under such strains. He landed in the cover of the tail vanes of a wrecked cutter. He looked around, selected a target, and jumped again.
The jump carried him through the line of fire of one of the whirling two-barrel lasers. Its pulses stabbed harmlessly past him with far more power than they needed to kill one man. The weapon was still firing in its ship-killing mode; it took too long to recycle between the heavy pulses for the laser to lay out an effective antipersonnel pattern.
He came down in the gunpit, and the Krupp pulser in his hand speared the man before him with a lance of solid light. His left-hand plasma gauntlet vomited a streamer of incandescent energy and a second man fell back, screaming, wreathed in blue flame, to scatter the rest of the guntechs as he was consumed.
Possibly the most personalized form of vehicle, and one of the more complex per cubic centimeter, would be one that the soldier wears. Individualized battle armor, grown massive enough to require servomechanical muscles, could be classed as a vehicle for the wearer. The future for massive man-amplifying battle dress doesn't look very bright, though. If the whole system stands ten meters tall it will present an easier target; and if it is merely very dense, it will pose new problems of traction and maneuverability.
Just to focus on one engineering facet of the scaled-up bogus android, if the user hurls a grenade with his accustomed arm-swing using an arm extension fifteen feet long, the end of that extension will be moving at roughly Mach 1. Feedback sensors would require tricky adjustment for movement past the trans-sonic region, and every arm-wave could become a thunderclap! The user will have to do some fiendishly intricate rethinking when he is part of this system—but then, so does a racing driver. Man-amplified battle armor may pass through a certain vogue, just as moats and tanks have done.
The power source for this kind of vehicle might be a turbine, until heat-seeking missiles force a change to fuel cells or, for lagniappe, a set of fly wheels mounted in different parts of the chassis. The rationale for several prime movers is much the same as for the multi-engined aircraft: you can limp home on a leg and a prayer. Aside from the redundancy feature, mechanical power transmission can be more efficient when the prime mover is near the part it moves. Standing ready for use, a multiflywheel battle dress might even sound formidable, with the slightly varying tones of several million-plus RPM flywheels keening in the wind.
Mecha: A larger than human sized powered-exoskeleton controlled by a human operator in an internal control cabin (generally in the Mecha's head or chest) via a game controller, exo-mocap, or BCI. If controlled by exo-mocap, usually has haptic feedback. According to TV Tropes tank-sized mecha are "Mini Mecha" and mecha which are several stories tall are "Humongous Mecha". As they put it, if the operator can be described as a "pilot" or "driver", then you have a Mini Mecha on your hands.
If COM: is anything but NON, then it is a Combat Mecha.
The difference between an powered exoskeleton and a mecha is pretty straightforwards, but there is still a gray area. Exoskeletons are form-fitting and thus quite close to the size of the operator while mecha are typically huge with the operator inside a control cabin. Having said that, some mecha are controlled by the operator in the cabin wearing an exo-mocap that looks suspiciously like an exoskeleton with no armor (see the McCauley Walker below for an example). Powered exoskeletons are true "man amplifiers", they augment the operator's strength to do tasks. Mecha act more like an operator with a tractor or front-end loader. Mecha range in size from the size of a tank (Armored Trooper Votoms), to a few stories tall (Gundam), to the size of a skyscraper (Space Runaway Ideon), to the size of a city (Macross), or even larger.
The TV Tropes site calls mecha that are tank-sized or smaller "Mini Mecha" while those that are larger are called "Humongous Mecha." As they put it, if the operator can be described as a "pilot" or "driver", then you have a Mini Mecha on your hands. GURPS Mecha defines a "battlesuit" as powered armour where the pilot's arms and legs extend into the suit's arms and legs. A "mecha" is piloted from a cockpit.
Armored units from Command & Conquer: Tiberian Sun (1999). According to the TV Tropes classification, from left to right: Drone, Human being, Powered Armor, Mini Mecha, Humongous Mecha.
Armored units from Command & Conquer: Tiberian Sun (1999). According to the TV Tropes classification, from left to right: Drone, Human being, Powered Armor, Mini Mecha, Humongous Mecha.
AMP suit from Avatar (2009). This is borderline between powered armor and mecha. While the operator is in a control cabin like a mecha, the operator controls the arms with an exoskeleton like powered armor.
John Reiher noted that the AMP suit from Avatar (pictured above) has a problem. The thing can't walk unless it can shift its center of gravity from one foot to another. If you play with the toy version of the mecha, you quickly discover that if it lifts a foot it will fall over. Its hips are too wide. This can be addressed with a some tricky engineering, but the design as pictured won't work.
Actually I learned about a possible solution back in 1966, which I was a little boy. The solution is probably older than I am.
I had a wind-up Snoopy walking toy. You wind up the spring and the toy walks. I noticed on the feet there were prongs. They looked unsightly to me, so I trimmed them off.
And when I wound it up, immediately with the first step the toy toppled over onto its side. There it lay sideways, with its feet sadly paddling the air. Obviously those prongs were crucial to keeping it upright.
See the prongs on the feet?
A bus' "gravity line" is a line drawn from its center of gravity to the planet's center of gravity. If the bus is tipped enough so that the gravity line falls outside of the wheelbase, the bus topples over. For road vehicles this is called a tilt test.
In the diagram, the gravity line is blue, and the center of gravity is the black-and-white crossed disc.
In the diagram, the gravity line is red, and the center of gravity is the black-and-white crossed disc. The yellow cross is where the gravity line hits the ground (at the midpoint between Snoopy's left side and right side). The green rectangle is place the left foot makes contact with the ground. The right foot is not making contact with the ground.
If the yellow cross leaves the green rectangle, Snoopy topples over.
Here silly me has trimmed off the prongs. Now the green rectangle has narrowed so much that the yellow cross is very much outside
By looking at the diagram of Snoopy above, you can deduce what happened to me. If the yellow cross leaves the green rectangle, it is topple time. When I foolishly trimmed the prongs from the feet, the green rectangle suddenly narrowed enough so the yellow cross was outside. If both feet were on the ground, the combined green rectangle confined the yellow cross. But the instance one foot was lifted, the green rectangle narrowed to the point where a topple was inevitable.
If you don't trim off the blasted prongs like an idiot, each foot's green rectangle is big enough to contain the yellow cross. This allows the toy to alternatively balance on one foot while moving the other foot ahead, thus making a walk cycle. Note that the tip of each prong must extend past the halfway point to the other side, since the yellow cross is at the halfway point between Snoopy's left side and right side.
Obviously my point is that early crude Mecha may have no choice but to have similar prongs on their feet.
WHY GIANT MECHA ROBOTS ARE STUPID
Admit it, you love giant robots. Call them mecha, Gundam, super robots, battlemechs, or whatever—you love them. I love them. Everyone loves them. Ultraman. MechaGodzilla. Gigantor. Voltron. The other Voltron. Tranzor Z. Each of these franchises has found international acclaim and nourished the battlebot desires of millions of fans—some of whom forget exactly how fictional these sci-fi superdroids really are.
The next person who says "I can't wait until the Army develops real mecha" gets a boot to the head, because in real life, mecha are actually really stupid. Here's why:
Bipedal robots are stupid
Pretty much since the dawn of robotics, we've been trying to find a way to make robots walk on two legs. Not because anybody needs robots to walk on two legs, but just to prove it can be done. And while it is possible now, with millions of dollars of technology and advanced software, it still can't be done well. Try and get Asimo to walk up stairs or, you know, move quickly and you get the picture. Bipedal locomotion is hard. That's why it's rare in nature.
Compare the number of two-legged creatures to those sporting four, six, or eight legs and you'll realize that bipedal is a gross minority position, for a variety of reasons. Four legs is a minimal base for stability—just ask any table. You could get by with three legs, but you you abandon bilateral symmetry, which virtually every creature on Earth has, and you also give up some basic redundancy. A four-legged creature can get by on three legs in a pinch, but a biped isn't going far hopping on one foot. Also, being bipedal means that any rest state requires a change in position—you can't sleep standing up. Thus, if a bipedal mecha were to lose power—or just be turned off—it would at best be left in a vulnerable state that was easy to push over, and at worst would collapse into a heap of mangled, unconscious robot wreckage. Sure, mecha are as tall as skyscrapers, but they don't have that handy bolted-to-the-ground thing to keep them from toppling in a swift wind. (Even with quadrupeds, stability can be an issue if you don't set up a low center of gravity. Case in point: AT-ATs.)
Biologically, most bipeds started out as quadrupeds and gave up the forelegs (and four legs) to convert them into some more specialized appendage — say, a wing or a grasping, tool-using hand. When you can flat-out design a function-specific battlebot, you don't need to make these kinds of zero-sum tradeoffs. Which brings up another point...
Robot hands are stupid
The whole point of a hand is to grasp tools and objects. That's what it's for. Now, if you're a giant robot, what exactly are you grasping, apart from the giant energy sword that exists solely to justify the creation of your giant hands? Again, when you're custom-building a combat robot, you don't have to make a generic interface like a hand, you can just weld the energy blades, rocket launchers, laser cannons and whatnot right onto the frakkin' robot where they can't be dropped.
Sure, you can pick up some cars and hurl them for sport, but that's hardly an efficient use of resources. And there are better climbing implements than human-style fingers and thumbs — setting aside the fact that there's almost nothing out there with the structural integrity to handle the weight of a mecha trying to climb it. Also, a lion's mouth for a hand is cool looking but hideously impractical. Then again, so are flying robot lions.
Giant robots are stupid
What, exactly, is the point of being the size of the Chrysler Building, unless your job is to fight the Chrysler Building? (Please don't, the American auto industry has enough problems.) If Godzilla shows up, I might spot you the on-a-lark tactic of meeting the radioactive reptile with an equal-scale automated countermeasure, especially if conventional weaponry has failed and King Kong is busy filming a sequel with Peter Jackson. But since reality is tragically short on kaiju city-wreckers, what's the point?
Most mecha are depicted as military weapons, but not even armed navies like to build things any bigger than they have to. Aircraft carriers are a quarter-mile long because it's a necessary length to land and launch planes. Everything else about their scale flows from that design constraint. Most every classic naval battleship has been retired because speed, agility, and coordinated attack — the kind that GPS, computerized communications, and precision-targeted ordnance make possible — are prized over bulk tonnage. We'd rather have a swarm of destroyers and fast-attack boats than one big dreadnought, if only to avoid the issue of making a big giant target. Same goes for robot warriors.
Basically, giant humanoid military mechas are stupid
All of the above sets aside the fact that (at least according to Wired) it would cost $725 million just to build a basic mecha from existing tech, and that doesn't even include any of the cool super weapons — or, for that matter, the actual development, design, and systems integration costs needed to build a super robot from off-the-shelf parts.
This is not to say that uber-bots will never exist, just that they won't look anything like a Gundam.
In a general sense, legs are better than wheels or even treads when it comes to dealing with uneven terrain and extreme grades. Legs don't need flat surfaces with minimal obstacles, so a quadrupedal (or better) robot is actually an advantage in many situations. Like, say, other planets that haven't seen much civilization. Thus, we're likely to see walking robots in the future — on four or more legs. (For all the film's remaining idiocy, the AMEE droid from Red Planet is actually a pretty clever and workable take on what an explorer robot would look like.)
We may also see large-scale robots in the future as the technology becomes available to automate — and make autonomous — large industrial equipment. Robot cranes, trucks, excavators and loggers are very likely on the horizon. Just make sure they're programmed not to squish the environmental protesters they encounter (unless the protesters start building androids to replace their numbers, too).
Humanoid robots also have a role to play — in places where they will operate in shared environments with humans. Every building on Earth is designed by and for humans, so rather than redesign every edifice on the planet to accommodate our new cybernetic overlords, simply make the robots human-like, so they can walk up stairs, open doors and operate human-friendly equipment with us.
What is unlikely is a confluence of gigantic, humanoid, ambulatory, military robots — better known as mecha. Anyone who says otherwise needs to detox from the anime and take an engineering course or two.
The benefits and merits of using mecha are highly dependent on how big these mecha are.
Under 9' Tall
At the lowest end of the size scale, you have what is probably better coined powered armour. But mecha this big should be considered, if for no other reason than to illustrate where larger mecha sizes potentially don't have much use. A 90' tall isn't going to fit inside a building, but a 9' tall is... providing they smash a 9' tall door frame upon entry.
I chose 9' because I pictured a person and scaled them up until they had to duck uncomfortably in my office. Then I replaced this person with a robot. This mecha is tiny by mecha standards, but is by no means a lightweight. The average person displaces 66 litres of liquid when fully submersed, and is 5'4" tall (which strikes me as unusually small). Scaling this up to 9', my mecha displaces 332 litres. If we assume the mecha is predominantly made of Iron (7.87 kg/L), it weighs-in at 2.5 tonnes (sans room for the pilot).
Modern militaries still use infantry for a great number of reasons, but the two I think are relevant to you are; they can go where vehicles can't, and they can make high-level decisions where-as a machine cannot (yet).
Mecha this sized should be able to withstand small-arms fire much better than infantry can. If you need shock-troopers to lead an assault against a defended position, this guy is your best friend.
Over 9' Tall
For the moment, I'm going to assume that mecha weigh the same as an M1A2 Abrams Tank (~62 tonnes). And has a similarly sized gun, similarly rated armour, and a single pilot, and is vaguely human-shaped. The M1A2 has a crew of four(4), so a single pilot is a massive improvement with regards to minimising loss of life.
Applying my scaling rules from the 9' tall case, this mecha should be in the order of ~25' tall. Taller than a two-story building, but only slightly.
In urban environments, the mecha has a surprise advantage over M1A2. It can poke-out from cover faster than a tank can. It can then retreat to cover quickly too. However this is a pretty moot point because I don't think city buildings withstand cannon fire very well. The M1A2 simply has to aim where the mecha is hiding, and shoot through the cover and will either hit the target, or shower it with chunks of the (now missing) concrete wall.
Since this mecha is vaguely human-shaped, it might be capable of replacing construction equipment. By construction, I mean demolition, and equipment, I mean lets knock this wall down and block traffic. Pile those cars up in places that obscure enemy line of sight and give friendly troops a place to hide.
This doesn't need fine motor control. Just hydraulic grippers.
Where problems occur
If you want to follow some degree of scientific hardness, then the square-cube relationship is what stops you from scaling up mecha in size. If you make something twice as tall (and wide and thick) it becomes eight times heavier. But it only becomes four times stronger. Eventually, it reach a point where it weighs so much that it can't support itself (scaling down, you get proportionally stronger - which is why ants carry many times their body weight with ease).
I won't say where this point lies. I that kind of maths is some heavy mechanical engineering, and it depends on what you build your mecha out of. 25' might be attainable with today's metallurgical knowledge. Then again; it might not.
Speed. This is where I think tanks trump mecha.
Scaling up human running speeds to 25' tall people gives silly results. Think, 200km/h sprinting. Which is more than three(3) times the M1A2's [reported] top speed. This is because I didn't factor in the square-cube relationship.
I expect tanks to have a higher top speed than mecha. On an open plain, you will want tanks. That said, using tanks in an open plain today is probably a nigh-suicidal tactical decision. Heat-seeking missiles have speed and ranges far greater than what a tank can react to. The best defence is not presenting a target to shoot at in the first place. Land mines exist, as do people with rocket launchers and rocket-propelled grenades.
Moving parts. Put simply; the more moving parts something has, the more parts that will need maintenance, and the more parts that can (and will) get damaged during use. The fewer moving parts your mecha has, the more robust it will be. Mecha that have as many degrees-of-freedom as a human are probably too fragile to be practical and will require too many man-hours of maintenance. Mecha should be treated as sledgehammers, not scalpels.
Plausible role for mecha
I think the most plausible place for mecha in a near-future military would be in situations where you need mobile firepower that's more than infantry can comfortably carry, but comes in a package that's smaller than a tank.
SMITHKM:
Barring some form of setting specific contrivance, none.
The goal in building an armoured fighting vehicle like a tank is to give it the best armour for its mass, to spread the weight out over the largest area you can so it has grip and won't sink into the ground, to give it the lowest profile you can so it is a difficult target and can hide behind terrain features, and in the particular case of tanks, to pack in the biggest gun you can manage so that you can beat the armour of enemy AFVs, and to provide stability for that weapon so you can fire it accurately, even when moving.
A flat, low to the ground box with enormous treads and a single big gun mounted in a rotating turret in the middle does this very well.
A giant humanoid is very hard to armour, It has a large surface area for its size and complex, multi-axis joints that are near impossible to armour effectively. This is also the major difficulty with human body armour. A tank is a compact box with a turret that has two single axis rotating joints making it fairly easy to armour. The treads are more difficult, but still easier than limbs, especially at the front.
Bipeds also have very high ground pressure compared to a tank. Even if given snow-shoe-like feet, a biped is going to find a much larger range of terrain to be "soft" than a similarly massive tank is.
Because of its low slung design and top mounted turret, a tank is able support a gun that is a significant proportion of its own mass. A mech the size of a tank would not be able to use a gun anywhere near the size of the tank's gun.
A tank is always laying prone compared to a mech and still able to move at full speed. A giant humanoid is an easy target. It can drop prone, but only if it knows in advance that it is about to be attacked, and it will take much longer to do so that a human would (it takes time to fall a greater distance) and will take more damage from doing so (Square cube law plus longer fall.) Afterwards it will be unable to move effectively until it stands back up.
The agility and familiarity of movement often suggested as benefits of mecha is also going to be hampered by the square-cube scaling issues. They just wouldn't be able to move like we can, any more than an elephant could move like a cheetah. Even with a full on neural interface that makes it feel as if the vehicle is your body, the limitations and change in scale would feel extraordinarily alien. It would be something like adapting to having osteoporosis, with ordinary ground feeling soft and slippery like mud, in low gravity.
With fewer degrees of freedom to worry about, it would probably be much easier to adapt existing training with other ground vehicles to tanks than body sense to mecha. Without neural interfaces or something similar, there's absolutely no benefit to a humanoid shape, and a massive increase in complexity in terms of controls.
Besides overestimating the agility a giant robot would have, many people underestimate the agility of tanks. Considering they weigh 40-50 tonnes or so, modern tanks are phenomenally manoeuvrable. They are also extremely stable while maneuvering, allowing them to attack effectively while on the move, and they are extremely resistant to being flipped.
Some have suggested that height gives an advantage in seeing the enemy, but there are tanklike vehicles already have telescoping periscopes that they can deployed without having to expose the rest of the vehicle. This gives the benefits of height without the drawbacks of raising the entire vehicle.
A tank is also just a lot simpler to build as it has fewer things that need to be moved around. It doesn't need a complex dynamic stability system just to keep it from falling over, and it doesn't need a neural interface or motion capture system. So you can build more tanks with the same resources.
So that leaves contrived reasons:
We have giant humanoid chassis from some outside source that are just better than any tank we can build for whatever reason: Robots built by aliens for some inscrutable reason, or maybe giant alien carcasses. We don't have the capability to make the same materials from scratch or to re-shape them into more practical forms.
Magic in some form is used to operate them and for whatever reason, magic vehicles work better if human shaped. The same goes if magic is called something else like 'psionics'.
They aren't meant to be practical. Like much of the Goa'uld technology in Stargate, there are psychological/social reasons to have a design that's much less effective than could be produced otherwise. The imperial walkers in Star Wars are probably best explained as terror weapons.
They are just better by authorial fiat because the author wants giant war robots. This explains them in most settings that have them including Gundam, Macross, and Battletech.
BORNTODOSTUFF:
Bipedal Mechs are not the Right Choice™
I am noticing a lot of answers focusing on bi-pedal mecha. I think this is a poor choice for many reasons and I will list them and then move to why I think they matter.
(lack of) Redundancy
Limits to locomotion
Complicated joints
Bad Height
Awkward Stability
I agree with @user6511's post about bipedal mecha in some ways, especially for mecha under 9 feet. For small mecha, I think that bipedal may be viable. However, I think that it will fall short of expectations once it is bigger than what is essentially the marine armor from Starcraft.
My proposed solution is a hexapod (or octopod) mecha.
The additional legs would address all of the above points while maybe keeping the weight of the mech down and probably making it easier to produce.
Lack of Redundancy
If one joint is even slightly damaged the mech is going to come down. Human locomotion is extremely sophisticated and a surprisingly delicate balancing act. It could be worse than dead weight if it won't move properly. What is the solution? More legs!
In a hexapod mecha even if one of the legs is blown completely off it will be fine, in fact, it could theoretically still remain mobile with half its legs even if it is slow. That is a lot more than can be said for the biped.
Limits to Locomotion
Because of the square-cube relationship (where things get heavier way faster than they get stronger) its unlikely that a 2 legged mecha will be able to jump or climb very well, they will be dependant on a surface that can be walked on, even if it may be able to be more jagged or steep than a surface a tank could traverse. It would have to have very big feet for balance and to support the vertical weight. What could fix this? More legs!
Hexapods to the rescue. It has more points of contact, therefore, spreading out the weight over more space. Additionally, with all of the legs it has, it's very feasible to say that it could jump. Not as dramatically as a spider, but being able to leap a short distance in an emergency could be life-saving. I theorize that with the extra mobility options it would never have to though. It can easily traverse tall ledges, step across trenches or over roadblocks, and because of its many points of contact, it would definitely be better at handling steep slopes and jagged terrain than tanks or bipeds (although I guess not as well as planes technically).
Complicated Joints
Didn't I already talk about complex joints in point 1? Yes! But not enough!
The very minimum a bipedal mech would need for each leg is 3 joints... wait, isn't that the same amount of joints as in a hexapod mecha leg? Yes, but also no. The knee joint is simple, it just needs one axis of movement, hooray! But if you want your mech to be able to balance itself the ankle needs 2 axes or the mech needs to be moving its arms around a lot to throw its weight into the balance corrections. The arms moving around a lot seems like a bad idea for many reasons even if the weapons are not attached to the arms so I am assuming that the ankle either has 2 axes of movement or its a complex multi-part foot with either 2 joints in addition to the ankle joint or 4 total joints within the foot and no ankle joint. And then the hip joint, even assuming simplicity, will need at least 2 axes of movement. If it doesn't then the robot can't turn its legs unless you want to throw even more complexity into the feet.
So how does the hexapod fix this? Well, each leg needs exactly 3 joints, just like a simple bipod, but each of these joints only needs a single axis of movement for the robot to be able to do everything it needs to do. The joint attaching to the body only needs to be able to move in an arc parallel to the ground, and the two leg joints only need to be able to move perpendicular to the ground as you can see in my incredibly detailed and beautiful diagram here.
(red arcs are arcs of movement)
So while it may have more joints total, the simplicity of them allows a lot more options for what can actually be used to control them and how they are manufactured and serviced.
Bad Height
Bipedal mechs kind of have to be taller because of the nature of how they work. The stubbier their legs are the harder it is for them to balance and move and the less benefit you actually gain from having them in the first place. They are easy targets because of their height, and being an easy target just makes it that much more likely they are going to get shot. Being shot is bad, so being tall is bad.
Hexapods are able to easily stay close to the ground, in fact, they can position themselves so they are only barely taller than the cabin (cockpit) that the legs are attached to and still locomote. They are also able to make themselves taller than their standard resting position if necessary to poke their weapons above a piece of cover or terrain.
Awkward Stability
Now bipedal mechs would have some sort of shock absorber on them for their weapons firing I am sure, so we can assume their own weaponry wouldn't pose balance issues for them, but what about taking heavy fire? Only having two points of contact (and relatively small ones for their mass) is not great when you are taking that much force straight to the armor plating. There will have to be constant balance calculations and adjustments made even for just normal operation out of combat and their stability just gets even more calculation intensive and delicate once they are in rough terrain and required to move quickly while possibly under fire. I am not a physicist but it seems to me that if its armor cant take the hits its dead, and if it can take the hits it might just fall over because of its high center of gravity.
A hexapod does not suffer from stability concerns. Even with several legs missing it is simple to move. Additionally, because of its low center of gravity and proximity to the ground it almost cant "fall over" even if it does get hit hard enough that its many legs cant stabilize it.
Hexapods are Boss
The hexapod mech has many advantages to biped mechs. It is able to maneuver through extremely complex terrain, climb very steep surfaces, stay low to the ground, can fit through almost any space that is at least as wide as the cockpit (leg configuration for fitting through narrow spaces), theoretically be straight up faster, and because of their simple joints should be easier to manufacture and maintain.
They would be advantageous over tanks for their mobility in weird terrain (because of their ability to increase their height they would be better at fording rivers. Tanks usually have Deep Wading but it takes setup time, endangers the crew, and any leak in the tank is bad news. Why not just walk above it?), ability to simply step over/onto/into roadblocks and trenches, and with the right attachments have any of the more advantageous aspects of a biped that other answers have suggested.
Alien mecha from District 9 (2009). Human mecha often resemble a robot in human form. So it is logical than an alien mecha would resemble a robot in alien form.
Martian Tripod from H. G. Well's War of the Worlds (1898). Cover of Amazing Stories pulp August 1927. Artwork by Frank R. Paul.
APU (Armored Personal Unit) from The Matrix: Revolutions (2003). This is technically not powered armor, although it is powered, it has no armor. Apparently the Sentinels can easily penetrate any armor so why bother? The Animiatrix showed that armor only prolongs the suffering of the operator. This also means APU is a misnomer.
APU (Armored Personal Unit) from The Matrix: Revolutions (2003). More or less a weaponized power loader.
Coyote Tango Humongous Mecha. From Pacific Rim (2013)
Coyote Tango Humongous Mecha. Detail showing control cabin in mecha's head. From Pacific Rim (2013)
Scene is control cabin inside head of a Humongous Mecha. Black suits are exo-mocaps. The steel frames are the suspension frames. From Pacific Rim (2013)
Walk cycle for suspended exo-mocap. Note parts of suspension frame attached to shoes. From Pacific Rim (2013)
Teleroboticsaka "Drone" or "Remote": In this context, a man amplifier, powered armor, or mecha where the operator is not inside the machine, but instead is located at some distance using remote control. In other words if the LOC is + it is telerobotic, regardless of the other parameters.
If controlled by exo-mocap it almost invariably has haptic feedback. Most telerobotics in the real world and science fiction have human operators, but there are some controlled by computer apps and AIs.
If COM: is anything but NON, then it is a Combat Drone.
Ideally we would be talking about a humanoid drone controlled by a remote operator wearing an exo-mocap, but in the real world such drones are conspicuous by their absence.
PackBot explores the lethally radioactive Fukushima Daiichi nuclear power plant disaster (2012). 57 millisieverts per hour, yikes!
Unlike robots, drones et al have no on-board brains or AI, they are remotely controlled by a human being. Waldoes are fixed in place, while robot arms like the amazing Canadarm can "walk" from socket to socket like a giant metal caterpillar.
Canadarm 2
Canadarm 2 socket. The socket plugs into Power Data Grapple Fixtures.
A Power Data Grapple Fixture. These provide the arm with power and a computer/video link to astronaut controllers inside.
"And you are right, Mr. Chao. It may well be wise to get a gravities man down there." Daltry looked down at his notepack again. "I notice one other thing in your file. You are experienced with teleoperators?"
Larry hesitated a moment. "Well, yes. I am. We use them at the Gravities Station for doing maintenance on the Ring."
"Wait a second," Lucian said. "A teleoperator. A remote-control robot? Those things don’t give you the dexterity or the reflexes you need for this kind of job."
"I agree," Daltry said. "We can’t send a T.O. down by itself. But they do have advantages. They can do heavy lifting. They can carry telemetry. And they are expendable. Of course, we haven’t found the entrance to this so-called Rabbit Hole yet. Maybe we won’t find it in time for Mr. Chao to run the T.O. from the surface. Maybe we’ll never find it. But if we do, it seems to me, Mr. Dreyfuss, that we could send a T.O. down with you."
Lucian stepped into the cage, sat in his crash couch, and turned his head to regard his companion for this little jaunt. It sat there, motionless, on a packing case full of radio relay gear. A humanoid teleoperator. And an ugly one, too: all angles and cameras, wires and servos, more closely resembling a human skeleton than a human. Its dark metal frame was gaunt and wiry, and the object above its shoulders could be called a head only because of its position.
Two primary television camera lenses were more or less where the eyes should go, and two strangely sculpted mikes where the ears should go. But half a dozen other auxiliary camera lenses, and boom and distance mikes, augmented its operator’s senses.
The sweat ran down Larry’s brow. Even just sitting still in this thing was a strain. No matter what he might say to keep Lucian settled down, wearing a teleoperator control rig was tough work. Larry was so thoroughly enveloped in the control rig’s exoskeleton that the comm techs at the other end of the room could barely see him.
The control rig hung in midair, so that the feet would be unconstrained by the floor. He could run, jump, kick, wave his arms, do anything he wanted, and the control rig would stay right where it was, merely waving its limbs about. The teleoperator down below actually moved.
Pressure sensors inside the legs, the arms, the body of the teleoperator itself transmitted their sensations back to servos inside the control rig, providing appropriate physical sensations based on what the T.O. was doing. The mildest of electric shocks susbstituted for a pain response, warning Larry if what he was doing threatened to damage the T.O.
Larry’s head was hidden inside an enormous helmet. Inside it, two video screens displayed the view out of the T.O.‘s cameras. Larry’s earphones merged the faint noises transmitted to the T.O.’s external mikes with the voices on the comm channel.
Wires and gears, levers and sensors: that was what the control rig looked like from the outside.
From in it, things were different. Larry was not in the comm center. He was riding down that huge pit in an open elevator cage, alongside Lucian, the darkness a shroud just outside the feeble lights, the fetid air whistling past his ears. He was there, all his physical sensations keyed to the place he wasn’t.
(ed note: The term you are looking for is "virtual reality")
But he knew that all he felt was unreal. This darkness, this wind, did not surround him. This frightened man in a pressure suit, whom he could reach out and touch, was not there. It was like the strange self-awareness he sometimes felt in a nightmare, knowing the dream was not real, but still experiencing it, accepting the world’s unreality even as he struggled against the demons.
But that sort of detachment had no place in a tele-operator rig. He had to believe, wholeheartedly, that he was down in that shaft.
But the other roller robot grabbed for the teleoperator. Larry, staring through the eyes of the T.O.‘s remote cameras, dodged the first grab and kicked out hard at the manipulator arm. The arm swung back, rebounded against the robot’s body—and then plunged deep into the T.O.’s carapace, seeking not to grasp, but to tear, to rip.
Larry screamed as the control rig shot pain-reflex shocks through his body. The electric charge was not enough to hurt, but Larry was not just in his own body anymore. He was in the T.O., and his chest had just been ripped open. The pain was real, in the place where all pain was real, in the mind, in the soul. He imagined his heart sagging out of his chest wall, shattered ribs hanging at obscene angles. His left leg buckled as a control circuit shorted. He swung out with his right arm, desperately trying to defend himself—but that razor-sharp claw sliced his arm off at the elbow.
Larry screamed again at the pain shock as his arm spun away. Real and imagined, seen through the soul and the TV cameras, he saw his arm shorting and sparking, spewing imaginary bright red blood from hydraulic lines. He saw hallucinated, bleeding flesh visible under the shattered metallic skin. And then another cruel slash, and Larry screamed in a voice that choked off as his head was hacked away from the teleoperator’s body. The T.O.‘s vision switched automatically to the chest cameras. Dead eyes that still could see watched in mindless terror as the T.O.’s head smashed to the littered, filthy ground and the little scavengers began to pick over the teleoperator’s corpse.
They pulled Larry, screaming, from the control rig and put him under with the heaviest anesthetic they could find.
Dr. Simon Raphael sat in Larry Chao’s cabin, watching the Moon grow smaller in the monitor and wondering what it was like to live through decapitation.
Dr. Raphael had never worn a teleoperator control rig himself, but the experts said that the better the rig, the more realism it provided—and the more traumatic the psychic effects of an accident to the teleoperator.
The rig Larry had been wearing was one of the best.
Cyborg: In this context, a Man Amplifier that is surgically embedded inside the human operator's body. Sometimes also includes other enhancements, such as sensors, life support gear, replacement organs, armor and weapons. Aka "bionics", "six million dollar man".
If COM: is anything but NON, then it is a Combat Cyborg.
Cyborgs are halfway between robots and crew. Are you old enough to remember the word "bionic?" While it would be a big help to have crew members who do not need to breath or be protected from the temperature extremes of the space environment, there are those who question whether such people are really people at all. More to the point, an SF author has to decide if their readers would rather read about metal men or red-blooded fully human heroes. This is why cyborgs in SF are generally either the main character in a world of humans or a small population of peripheral bit players.
NASA is a little uncomfortable with the concept as well. Which is a pity, since a properly designed cyborg would be far superior space travelers compared to us pathetic humans. Implant internal oxygen tanks to remove the need for breathing, implant food tanks to remove the need for eating, and implant an electrode in the pleasure center of their brain to remove the scourge of boredom. You could really save on life support mass by using cyborgs.
The concept of a cyborg covers quite a broad range though. At one end of the spectrum it is quite common to find people who have intraocular lenses in their eyes due to cataract surgery. At the other end one almost never encounters a robot body controlled by a human brain floating in a tank.
In the role playing game Universe, people with enough money can have an "internal gravity web" surgically implanted. This is a series of strong nets anchored to bone that support the internal organs. It allows the person to undergo accelerations larger than 2.5g indefinitely with no ill effects.
In Anne McCaffrey's Brain & Brawn Ship series, The parents of babies with brilliant minds but severe physical disabilities can opt to have their child become a "shell person" instead of being euthanised. They are not quite just a brain in a tank, but the difference is academic. One of the ways a shell person pays off their training debt is by hiring out on a "brainship", basically becoming a cyborg with a starship for a body.
Human body with cyborg organs Artwork by Roy Scarfo
A robot body controlled by a human brain floating in a tank Robotman from Doom Patrol (1942)
from New York magazine click for larger image
Brain in a tank Cyborg
Brain in a tank Cyborg
Brain in a tank Cyborg
No, I don't know where this is from either
SPACE ADAPTED CYBORG
From Spaceman comic book by Dell, 1972. The cyborg is obviously copied from the Freeman painting below. The comic book itself is pretty boring. Since these cyborgs do not breath, they also cannot talk using vocal cords. Instead they use an electronic speaker. That is why he appears to be talking out of his chest.
Ames Daily Tribune 16 July 1963
ON MOON cyborgs unreel cable to explosive for seismic blast. On front cyborg’s belt, tubes pump chemicals to blood to control (from left) blood pressure, pulse, energy, tranquility, blood sugar, body temperature, radiation tolerance. Pumps obey sensors like radiation counter in his left thigh or blood-pressure gauge in his right thigh. Heart, in X-ray view, sends blood to the implanted converter which remakes oxygen and carbon from CO2, taking place of lungs. ON back of other cyborg are food supply (top), master fuel cell, food processor and wastes’ canister. MAN REMADE TO LIVE IN SPACE Life Magazine July 11, 1960. Artwork by Fred Freeman
Striding buoyantly across the low-gravity surface of the moon, there may someday be strange new men — part human, part machine — like the ones above. They will have a strange name: CYBORGS (for CYBernetic ORGanisms). Cyborgs, according to the daring new idea, will be men whose body organs and systems are automatically adjusted for life in unearthly environments by artificial organs and senses. Some of these devices will be attached, others actually implanted by surgery. With their aid cyborgs can dispense with clumsy, easy-to-puncture space suits in which earth conditions are recreated. Instead they can move about safely wearing not much more than they would at home.
The artificial senses of cyborgs will measure changes inside the body and outside in the environment. They will signal artificial glands telling them what to secrete for regulating normal body functions. Then body temperature may fall to that of a fish in ice, or the pulse may quicken like a robin’s in flight, but the human organism will survive. Fantastic as the idea sounds, its originators (see next page) think that it is feasible and that much of the knowledge needed already exists.
From MAN REMADE TO LIVE IN SPACE in Life Magazine July 11, 1960. Artwork by Fred Freeman
ECONOMICALLY UNPROFITABLE
Part
of my training was taken over by Ursila Peri. A strong-willed young woman, she
was different from Omar Astrabadi in ways other than physical. She drilled into
me the procedures and techniques of deep space intra-orbital commercial
piloting. This is mostly procedural, doing the right things at the right time to keep the various
military forces in space from getting antsy. Sometimes it involved rather complex
trajectories that needed a lot of computer power. It helps to have computers to take over
the details of making a ship go where you want, but software can get screwed-up
even when
it's debugged. In spite of their large array of gates far exceeding the number
of neuronal connections in the human brain and their speeds many orders of
magnitude faster than the human nervous system, the human pilot still had the
upper hand. Computers might have been able to do it all, but nobody in his right mind wanted to
trust human life in space exclusively to computers.
Besides, a
computer doesn't have the human concept of "fun."
The fun of space travel
was more than just getting from A to B successfully. Any computer could do that.
"Fun" being an alogical emotion, it was strictly a human activity. It was
hanging things
out a little bit, daring the universe, and taking a risk. Omer tended to ignore
the computers and take great, big, juicy risks of the sort that scared hell out of me. On the other
hand, Ursila used computers as tools. She monitored them and let them do things she
could have done just as well. I fell somewhere in between Ursila and
Omer. I used computers, but I never trusted
them. As far as I was
concerned, there's always the possibility of the so-called "three-sigma
deviation," the occurrence that falls outside the 3-sigma limit of probability
computers were designed to handle. It kept sports from becoming cut-and-dried
exhibitions of physical prowess. There's always the guy who isn't where he's supposed to be when
he's supposed to be there, and there's always someone who fumbles the ball. This
same principle kept I human space pilots from becoming obsolete.
It also kept cyborgs from taking over because, being highly specialized, their use rate had to be kept high. Cyborgs, being partly human, needed rest, too. They couldn't perform 24 hours a day, 365 days a year like a machine. They were, to put it bluntly, technologically possible but economically unprofitable.
(ed note: Howard Falcon was the captain of the Queen Elizabeth on her maiden flight. The Queen was a new dirigible luxury liner, a titanic 300 meters long and heated with nuclear fusion. A news media drone camera, remotely operated, has its control signal switched by accident through a satellite connection without the operator being told. This introduces a control timelag, which causes the drone to crash through the Queen, which causes the Queen to crash in the Grand Canyon. Poor Howard is smashed like a bug in a vice.
Decades later, the re-built Howard wants to pilot a manned fusion dirigible into Jupiter's atmosphere. It seems that remote-controlled probes all fail due to timelag; ironic, that. Howard has special qualifications for the job.
Howard returns triumphantly, not only surviving the mission but also discovering Jovian life. )
“You’re a hero now, Howard,” said Webster, “not just a celebrity. You’ve given them something to think about — injected some excitement into their lives. Not one in a million will actually travel to the Outer Giants, but the whole human race will go in imagination. And that’s what counts.”
“I’m glad to have made your job a little easier.”
Webster was too old a friend to take offense at the note of irony. Yet it surprised him. And this was not the first change in Howard that he had noticed since the return from Jupiter.
The Administrator pointed to the famous sign on his desk, borrowed from an impresario of an earlier age: ASTONISH ME!
“I’m not ashamed of my job. New knowledge, new resources — they’re all very well. But men also need novelty and excitement. Space travel has become routine; you’ve made it a great adventure once more. It will be a long, long time before we get Jupiter pigeonholed. And maybe longer still before we understand those medusae. I still think that one knew where your blind spot was. Anyway, have you decided on your next move? Saturn, Uranus, Neptune—you name it.” “I don’t know. I’ve thought about Saturn, but I’m not really needed there. It’s only one gravity, not two and a half like Jupiter. So men can handle it.” (unlike baseline human beings, Howard can handle Jupiter's 2.5 g) Men, thought Webster. He said “men.” He’s never done that before. And when did I last hear him use the word “we”? He’s changing, slipping away from us…
“Well,” he said aloud, rising from his chair to conceal his slight uneasiness, “let’s get the conference started. The cameras are all set up and everyone’s waiting. You’ll meet a lot of old friends.”
He stressed the last word, but Howard showed no response. The leathery mask of his face was becoming more and more difficult to read. Instead, he rolled back from the Administrator’s desk, unlocked his undercarriage so that it no longer formed a chair, and rose on his hydraulics to his full seven feet of height. It had been good psychology on the part of the surgeons to give him that extra twelve inches, to compensate somewhat for all that he had lost when the Queen had crashed.
Falcon waited until Webster had opened the door, then pivoted neatly on his balloon tires and headed for it at a smooth and silent twenty miles an hour. The display of speed and precision was not flaunted arrogantly; rather, it had become quite unconscious.
Howard Falcon, who had once been a man and could still pass for one over a voice circuit, felt a calm sense of achievement—and, for the first time in years, something like peace of mind. Since his return from Jupiter, the nightmares had ceased. He had found his role at last.
He now knew why he had dreamed about that superchimp aboard the doomed Queen Elizabeth. Neither man nor beast, it was between two worlds; and so was he. He alone could travel unprotected on the lunar surface. The life-support system inside the metal cylinder that had replaced his fragile body functioned equally well in space or under water. Gravity fields ten times that of Earth were an inconvenience, but nothing more. And no gravity was best of all… The human race was becoming more remote, the ties of kinship more tenuous. Perhaps these air-breathing, radiation-sensitive bundles of unstable carbon compounds had no right beyond the atmosphere; they should stick to their natural homes: Earth, Moon, Mars. Some day the real masters of space would be machines, not men—and he was neither. Already conscious of his destiny, he took a somber pride in his unique loneliness—the first immortal midway between two orders of creation. He would, after all, be an ambassador; between the old and the new—between the creatures of carbon and the creatures of metal who must one day supersede them. Both would have need of him in the troubled centuries that lay ahead.
"Eric, you there?" "Where would I go?" he mocked me. "Well," said I, "if I watched every word I spoke I'd never get anything said." All the same, I had been tactless. Eric had had a bad accident once, very bad. He wouldn't be going anywhere unless the ship went along. "Touché," said Eric. "I'd better check your maintenance." "Okay, good. Go oil my prosthetic aids." "Prosthetic aids"—that was a hot one. I'd thought it up myself. I pushed the coffee button so it would be ready when I was through, then opened the big door in the forward wall of the cabin. Eric looked much like an electrical network, except for the gray mass at the top which was his brain. In all directions from his spinal cord and brain, connected at the walls of the intricately shaped glass-and-soft-plastic vessel which housed him, Eric's nerves reached out to master the ship. The instruments which mastered Eric—but he was sensitive about having it put that way—were banked along both sides of the closet. The blood pump pumped rhythmically, seventy beats a minute. "Jackass! Am I still alive?" "The instruments think so. But I'd better lower your fluid temperature a fraction." I did. Ever since we'd landed I'd had a tendency to keep temperatures too high. "Everything else looks okay. Except your food tank is getting low." "Well, it'll last the trip." "Yeah. "'Scuse me. Eric, coffees ready." I went and got it. The only thing I really worry about is his "liver." It's too complicated. It could break down too easily. If it stopped making blood sugar Eric would be dead. If Eric dies I die, because Eric is the ship. If I die Eric dies, insane, because he can't sleep unless I set his prosthetic aids.
Beyond the four-foot-square access door was Eric. Eric's central nervous system, with the brain perched at the top and the spinal cord coiled in a loose spiral to fit more compactly into the transparent glass-and-sponge-plastic housing. Hundreds of wires from all over the ship led to the glass walls, where they were joined to selected nerves which spread like an electrical network from the central coil of nervous tissue and fatty protective membrane.
Space leaves no cripples; and don't call Eric a cripple, because he doesn't like it. In a way he's the ideal spaceman. His life support system weighs only half of what mine does, and takes up a twelfth as much room. But his other prosthetic aids take up most of the ship. The ramjets were hooked into the last pair of nerve trunks, the nerves which once moved his legs, and dozens of finer nerves in those trunks sensed and regulated fuel feed, ram temperature, differential acceleration, intake aperture dilation, and spark pulse. These connections were intact. I checked them four different ways without finding the slightest reason why they shouldn't be working.
"Test the others," said Eric.
It took a good two hours to check every trunk nerve connection. They were all solid. The blood pump was chugging along, and the fluid was rich enough, which killed the idea that the ram nerves might have "gone to sleep" from lack of nutrients or oxygen. Since the lab is one of his prosthetic aids, I let Eric analyze his own blood sugar, hoping that the "liver" had goofed and was producing some other form of sugar. The conclusions were appalling. There was nothing wrong with Eric—inside the cabin.
(ed note: In the "Professor Jameson" novels by Neil R. Jones, the professor's frozen body has been inside a spacecraft orbiting Terra for a few million years, until it is discovered by alien explorers from the planet Zor.
The aliens are cyborgs, the only organic part left in the Zoromes are the brains inside the conical "heads", the rest is machinery. Zoromes are functionally immortal, as long as their conical heads are not damaged. They require no air, food, nor sleep. They do require a minimum amount of heat, but that's about it. They do have various accessories they can attach to their bodies, such as flying wings.
The Professor Jameson stories were one of the longest running SF series, twenty-one stories between 1931 and 1951. Which is surprising since the writing is so tediously bad. The series did influence several SF authors. Isaac Asimov said they were the inspiration for his benevolent positronic robots. Masamune Shirow paid homage to Jones in his cyborg-populated Ghost in the Shell saga by including a no-frills brain-in-a-box design, even naming them Jameson-type cyborgs.)
Within the interior of the space traveler, queer creatures of metal labored at the controls of the space flyer which juggernauted on its way towards the far-off solar luminary. Rapidly it crossed the orbits of Neptune and Uranus and headed sunward. The bodies of these queer creatures were square blocks of a metal closely resembling steel, while for appendages, the metal cube was upheld by four jointed legs capable of movement. A set of six tentacles, all metal, like the rest of the body, curved outward from the upper half of the cubic body. Surmounting it was a queer-shaped head rising to a peak in the center and equipped with a circle of eyes all the way around the head. The creatures, with their mechanical eyes equipped with metal shutters, could see in all directions. A single eye pointed directly upward, being situated in the space of the peaked head, resting in a slight depression of the cranium.
These were the Zoromes of the
planet Zor which rotated on its
way around a star millions of
light years distant from our
solar system. The Zoromes, several
hundred thousand years before,
had reached a stage in
science, where they searched for
immortality and eternal relief
from bodily ills and various deficiencies
of flesh and blood anatomy.
They had sought freedom
from death, and had found it,
but at the same time they had
destroyed the propensities for
birth. And for several hundred
thousand years there had been
no births and few deaths in the
history of the Zoromes.
This strange race of people
had built their own mechanical
bodies, and by operation upon
one another had removed their
brains to the metal heads from
which they directed the functions
and movements of their inorganic
anatomies. There had
been no deaths due to worn-out
bodies. When one part of the
mechanical men wore out, it was
replaced by a new part, and so
the Zoromes continued living
their immortal lives which saw
few casualties. It was true that,
since the innovation of the machines,
there had been a few accidents
which had seen the destruction
of the metal heads with
their brains. These were irreparable.
Such cases had been
few, however, and the population
of Zor had decreased but little.
The machine men of Zor had no
use for atmosphere, and had it
not been for the terrible coldness
of space, could have just as well
existed in the ether void as upon
some planet. Their metal bodies,
especially their metal-encased
brains, did require a certain
amount of heat even though they
were able to exist comfortably
in temperatures which would instantly
have frozen to death a
flesh-and-blood creature.
The most popular pastime
among the machine men of Zor
was the exploration of the Universe.
This afforded them a never
ending source of interest in
the discovery of the variegated
inhabitants and conditions of the
various planets on which they
came to rest. Hundreds of space
ships were sent out in all directions,
many of them being upon
their expeditions for hundreds
of years before they returned
once more to the home planet of
far-off Zor.
(ed note: While visiting our solar system, where all life on Terra became extinct millions of years ago, the Zoromes discover a strange metal cylinder.)
They now entered the compartment
where various objects
were transferred from out the
depths of space to the interplanetary
craft. Then patiently they
waited for the rest of the machine
men to open the side of
their space ship and bring in
the queer, elongated cylinder.
Zoromes discover Professor Jameson's forty million year old body
"Put it under the penetration
ray!" ordered 25X-987. "Then
we shall see what it contains!"
Guided by the hand of one of
the machine men, a series of
lights shone down upon the cylinder.
It became enveloped in a
haze of light which rendered
the metal sides of the mysterious
space craft dim and indistinct
while the interior of the cylinder
was as clearly revealed as if
there had been no covering. The
machine men, expecting to see
at least several, perhaps many,
strange creatures moving about
within the metal cylinder, stared
aghast at the sight they beheld.
There was but one creature, and
he was lying perfectly still,
either in a state of suspended
animation or else of death. He
was about twice the height of
the mechanical men of Zor. For a
long time they gazed at him in
a silence of thought, and then
their leader instructed them.
"Take him out of the container."
(ed note: it is the body of Professor Jameson, which has been orbiting in a space coffin for the last forty million years)
"He is dead!" pronounced one
of the machine men after a long
and careful examination of the
corpse. "He has been like this
for a long time." "There are strange thought
impressions left upon his mind,"
remarked another. One of the machine men,
whose metal body was of a different
shade than that of his
companions, stepped forward, his
cubic body bent over that of the
strange, cold creature who was
garbed in fantastic accoutrements.
He examined the dead
organism a moment, and then he
turned to his companions. "Would you like to hear his
story?" he asked. "Yes!" came the concerted reply.
"You shall, then," was the
ultimatum. "Bring him into my
laboratory. I shall remove his
brain and stimulate the cells into
activity once more. We shall give
him life again, transplanting his
brain into the head of one of our
machines."
With these words he directed
two of the Zoromes to carry the
corpse into the laboratory.
As the space ship cruised
about in the vicinity of this
third planet which 25X-987 had
decided to visit on finding the
metal cylinder with its queer
inhabitant, 8B-52, the experimenter,
worked unceasingly in
his laboratory to revive the long-dead
brain cells to action once
more. Finally, after consummating
his desires and having his
efforts crowned with success, he
placed the brain within the head
of a machine. The brain was
brought to consciousness. The
creature's body was discarded
after the all-important brain had
been removed.
(ed note: The grateful Professor Jameson tells the Zoromes stories of the long-dead Terra, then travels with them in a series of adventures over 22 short stories.)
(ed note: our hero has been enlisted by an eccentric scientist to test an experimental antigravity spacecraft. The test run is to fly to the moon. Unfortunately, as a side effect, the spacecraft also travels back in time about a million years. In this era, the moon has an atmosphere and a jungle like ecosystem.
After some close calls with ferocious lunar carnivores, our hero meets the Mother. This is a kindly creature, the last of her kind, whose body contains the eggs of the next generation.
Alas, she is being chased by evil cyborgs, the Eternal Ones, who are brains in a tank kinda sorta. The Eternal Ones are not brains surgically removed and put into life support tanks, so much as they are actually creatures who have atrophied over countless generations into little more than brains with eyes and rudimentary tentacles. Who live inside giant powered-armor killing machines.)
(The Mother) She had been the leader of a community of beings
that had lived on the highlands, near the source of the
great river that I had seen. A community in some respects
resembling those of ants or bees upon the earth.
It had contained thousands of neuter beings, imperfectly
developed females, workers. And herself, the only
member capable of reproduction. She was now the
sole survivor of that community.
It seemed that her race was very old, and had developed
a high civilization. The Mother admitted that
her people had had no machines or buildings of any
kind. She declared that such things were marks of
barbarism, and that her own culture was superior to
mine.
“Once we had machines,” she told me. “My ancient
mothers lived in shells of metal and wood, such as you
describe. And constructed machines to aid and protect
their weak and inefficient bodies.
“But the machines tended to weaken their poor bodies
still further. Their limbs atrophied, perished from lack
of use. Even their brains were injured, for they lived
an easy life, depending upon machines for existence,
facing no new problems.
“Some of my people awoke to the danger. They left
the cities, and returned to the forest and the sea, to live
sternly, to depend upon their own minds and their own
bodies, to remain living things, and not grow into cold
machines.
“The mothers divided. And my people were those
that returned to the forest.”
“And what,” I asked, “of those that remained in the
city, that kept the machines?”
“They became the Eternal Ones—my enemies. “Generation upon generation their bodies wasted
away. Until they were no longer natural animals. They,
became mere brains, with eyes and feeble tentacles. In
place of bodies, they use machines. Living brains, with
bodies of metal.
“Too weak, they became, to reproduce their kind. So
they sought immortality, with their mechanical science.
And still some of them live on, in their ugly city of
metal—though for ages no young have been born among
them. The Eternal Ones.
“But at last they die, because that is the way of life.
Even with all their knowledge they cannot live forever.
One by one, they fall. Their strange machines are still,
with rotting brains in their cases.
“And the few thousands that live attacked my people.
They planned to take the Mothers. To change their
offspring with their hideous arts, and make of them new
brains for the machines. Along the metal-paved streets, and on the wide courtyard
about us, things were moving. Not human beings.
Not evidently, living things at all. But grotesque things
of metal. Machines. They had no common standard
of form; few seemed to resemble any others. They
had apparently been designed with a variety of shapes,
to fill a variety of purposes. But many had a semblance
to living things that was horrible mockery.
“This is the land of the Eternal Ones,” the Mother
piped to me softly. “These are the beings that destroyed
my people, seeking new brains for their wornout
machines.”
Her piping notes broke off sharply. Three grotesque
machines were advancing upon us, about the platform.
Queer bright cases, with levels and wheels projecting
from them. Jointed metal limbs. Upon the top of each
was a transparent crystal dome, containing a strange,
shapeless gray mass. A soft helpless gray thing, with
huge black staring eyes. The brain in the machine ! The
Eternal One.
Horrible travesties of life, were those metal things.
At first they appeared almost alive, with their quick,
sure movements. But mechanical sounds came from
them, little clatterings and hummings. They were stark
and ugly.
And their eyes roughened my skin with dread. Huge,
black, and cold. There was nothing warm in them, nothing
human, nothing kind. They were as emotionless as
polished lenses. And filled with menace.
It was one of the upright metal rods that I seized.
Its lower end was set in an oddly shaped mass of white
crystal, which I took to be an insulator of some kind.
It shattered when I threw my weight on the rod. And
the rod came free in my hands, the white glow vanishing
from it, so I saw it was copper.
Raising it over my head, I sprang in front of the
foremost of the advancing machines—a case of bright
metal, moving stiffly upon metal limbs, with a domeshaped
shell of crystal upon it, which housed the helpless
gray brain, with its black, unpleasant eyes. I saw
little tentacles—feeble translucent fingers—reaching
from the brain to touch controlling levers.
The machine paused before me. An angry, insistent
buzzing came from it. A great, hooked, many-jointed
metal lever reached out from it suddenly, as if to
seize me.
And I struck, bringing the copper bar down upon the
transparent dome with all my strength. The crystal was
tough. But the inertia of the copper bar was as great
as it would have been upon the earth; its hundreds of
pounds came down with a force indeed terrific.
The dome was shattered. And the gray brain smashed
into red pulp. Then I looked in the other direction, and saw the Eternal
Ones. She had said the machines were near. I saw
five of them. They were moving swiftly across the
plateau, the way we had come.
Five grotesque machines. Their bright metal cases
were larger than those of the ones we had encountered
in the city. And their limbs were longer. They stalked
like moving towers of metal, each upon four jointed
stilts. And long, flail-like limbs dangled from the case
of each. Crystal domes crowned them, sparkling in the
sunlight—covering, I knew, the feeble gray brains that
controlled them. The Eternal Ones. As the machine-things came by, I was appalled at their
size. The metal stilts were fully six feet long, the vulnerable
crystal domes eight feet above the ground.
I leaped up, and struck at the brain of the nearest, as
it passed. My blow crushed the transparent shell and
the soft brain within it (because the lunar gravity is only 1/6th that of Terra, our hero can leap high enough to reach the crystal dome). But the machine toppled toward
me, and I fell with it to the ground, cruelly bruised
beneath its angular levers.
One leg was fast beneath it, pinned against the ground,
and its weight was so great that I could not immediately
extricate myself. But I had clung to the copper bar, and
when another machine bent down, as if to examine the
fallen one, I seized the weapon with both hands, and
placed another fatal blow.
The second machine fell stiffly beside me, an odd humming
sound continuing within it, in such a position that
it almost concealed me from the others. I struggled
furiously to free my leg, while the other Eternal Ones
gathered about, producing curious buzzing sounds.
At last I was free, and on my knees. Always slow in
such an unexpected emergency, the machine-beings had
taken no action, though they continued the buzzing.
One of them sprang toward me as I moved, striking
a flailing blow at me with a metal arm. I leaped up at
it, avoiding the sweeping blow, and struck its crystal
case with the end of the copper bar.
The bar smashed through the crystal dome, and
crushed the frail brain-thing within it. But the machine
still moved. It went leaping away across the plateau, its
metal limbs still going through the same motions as before
I had killed the ruling brain.
(ed note: Captain Future, the intrepid defender of the solar system and the system's greatest scientist, has three side-kicks. These are the Futuremen. The number one Futureman is Simon Wright, who is a brain in a tank.)
SIMON WRIGHT, known by repute to all the peoples
of the System as the Brain, is the oldest and
perhaps the strangest of the Futuremen. His
queer history goes back many years in the past.
In that past time, he was a normal man, Doctor Simon
Wright of a great Earth university. Acclaimed as
the greatest biologist who had ever lived, Simon had as
his goal the creation of intelligent life by artificial
means. He worked on it for decades, with all the brilliant
power of his intellect.
Simon was already old when he discerned at the university
a young student who gave great promise of a biological
career. This young man was named Roger
Newton — he was to be the father of Captain Future.
The aging Simon Wright took the young student as
his assistant, then as his colleague in the researches to
create artificial life. Newton had already made some
brilliant discoveries. The old scientist and the young
one now prepared to attack this supreme problem.
Then tragedy struck the elderly scientist. Simon
Wright discovered he was the victim of an ailment that
would definitely cause his death within a few months — a
blight contracted by a too reckless experiment with
microscopic creatures. He would die, and his mind
would perish without ever completing his great attempt
to create life.
THE BRAIN IS REBORN
Simon Wright decided that even though his body
must die, his mind, his brain, must not die. He proposed
to Roger Newton that his brain be transferred into a
special serum-case in which it could live and think and
work.
Newton recoiled from the idea at first. "To live as a
brain in a box, without any body? It would be too uncanny!"
"No, Roger," the dying scientist told him. "I have
lived a full life already, as a normal man. My only interest
now is in keeping up my work, my researches.
And I could do that, as a living brain, without being
hampered by this dying body of mine. I would be happy
so!"
Roger Newton finally saw the force of the old scientist's
reasoning, and agreed to perform the remarkable
operation.
All the biological genius of both men went into the
preparation of the case in which Simon's brain was
henceforth to live. It was made of transparent, indestructible
metal, so that the interior mechanisms could
be inspected at a glance.
In it were placed tiny, compact atomic pumps which
would pump the serum that would nourish the isolated
brain and carry away fatigue-poisons. Repurifiers were
installed to keep the serum always pure. An atomic
heating apparatus with thermostatic control automatically
would maintain a constant body temperature inside
the case.
When all was ready, Roger Newton performed the
operation. Working rapidly, he lifted Simon's brain
from his skull and placed it in the serum-case. Quickly,
he connected to its optic nerves the electric connections
of the artificial lens-eyes in the front of the case, and to
other nerves the connections from the microphone-ears
and the resonator by which the Brain speaks.
Ever since, Simon Wright has lived as the Brain, in
the serum-case. He has many limitations, of course. He
can speak, through the power-operated resonator whose
control is connected to one of his motor-nerve centers.
Another motor-nerve control allows him to turn his
eyes in any direction, and focus them. But he cannot do
anything else. He can't move himself about — Grag,
or
Otho, or Captain Future himself has to carry the serumcase
by its attached handle.
(ed note: in the latter stories, the serum-case was equipped with "magnetic traction beams". These allowed the Brain to fly about and manipulate objects)
But mentally, Simon is completely free. He can
read, or study, or observe, or think, without ever needing
rest or sleep. He never needs food. The only refreshment
he ever takes is a certain stimulating vibration,
which he has played upon him.
THE MASTER OF THE TRIO
When Simon wishes to make records, he dictates
them into a special recording-device. And when he
wishes to conduct one of his many scientific experiments,
he uses Grag or Otho to carry out the physical
work. Usually it is Grag who is his helper, for the great
robot can be trusted upon to obey orders with implicit
fidelity, whereas Otho will often get restless and try to
hurry things along.
Both Grag and Otho regard their fellow-Futureman,
the Brain, with profound respect. For it was Simon and
Roger Newton who created the robot and the android,
in the lunar laboratory to which they and Newton's
bride had fled for refuge. Neither Grag nor Otho ever
try chaffing the Brain — they
know that he can silence
them with a few well-chosen words in his cold, rasping
metallic voice.
In fact, though he was once a human man, Simon often
seems more unhuman than either Grag or Otho.
That is because to the Brain, the pursuit of knowledge
is almost the most important end of existence. He is
prone to lose himself in scientific abstractions and
overlook the practical necessities of the situation, until
awakened to realization by Captain Future.
All Simon's human feelings, indeed, seem wrapped
up in Captain Future. To him, Curt Newton is not only
the daring interplanetary adventurer famed all over the
System, he is also the child whom the three Futuremen
reared to manhood. No father could watch over Curt
more anxiously than does the Brain, yet Simon would
scoff at the idea that he could be sentimental about anything.
CAPTAIN FUTURE'S MENTOR
Simon's great aid to Captain Future and the other
Futuremen is in his encyclopedic scientific memory and
wonderful ability in research. Only the young wizard of
science whom he himself taught has ever excelled him
in scientific ability. For many decades the Brain has
been learning and has forgotten nothing and
there is
hardly a fact known to human science which he cannot
recall accurately and instantly from memory.
Simon has had some strange adventures during the
course of some of the Futuremen's exploits. Once, on
an asteroid whose people were inimical to Captain Future,
these hostile asteroidans raided Curt's camp when
only Simon was there. The asteroidans found the Brain,
but did not realize he was a living individual. They
thought him only a small scientific apparatus of some
kind, and Simon had the wit to keep silent and not enlighten
them. They took the Brain back with them as a
puzzling curio, and, for many weeks, Simon's serumcase
rested on a shelf in a dingy shop, no one dreaming
he was alive. Finally Captain Future found him and rescued
him from the strange situation.
Another time, on Venus, the Brain was vitally helpful
to Curt in a precarious situation. Curt needed the aid
of a remote tribe of the ignorant swamp-men, but could
not prevail on them to follow him. These swamp-men
worshipped a small idol of an octopus-god. Captain Future
secretly put the Brain's case inside the idol, and
then Simon spoke to the people and ordered them to
obey the red-haired Earthman, which they hastily did.
Simon is most often to be found in the elaborate laboratory
in the Comet, his square case resting on the special
pedestal which Curt designed for him, his strange
eyes perusing a scientific micro-film book or observing
the course of an experiment which Grag patiently conducts
under his direction. And more than one ambitious
interplanetary criminal has come to grief because of the
scientific magic wielded by the Brain in that
laboratory! For the Brain's great powers are one of the
Chief reasons why Curt Newton and his band of Futuremen
are feared by evil-doers from Mercury to Pluto.
From THE FUTUREMEN COLLECTION by Edmond Hamilton ()
BRAIN IN A TANK 6
(ed note: this is not a brain in a tank, so much as it is a small icky atrophied evil creature in a tank. It is sort of skirting the gray area between "cyborg" and "creature wearing powered armor")
Drawing inspirations from the real-life example of the Nazis, Nation portrayed the Daleks as violent, merciless and pitiless cyborg aliens, who demand total conformity to their will, bent on the conquest of the universe and the extermination of what they see as inferior races.
In the programme's narrative, the Daleks were engineered by the scientist Davros during the final years of a thousand-year war between his people, the Kaleds, and their enemies the Thals. With some Kaleds already badly mutated and damaged by nuclear war, Davros genetically modified the Kaleds and integrated them with a tank-like, robotic shell, removing their every emotion apart from hate. His creations soon came to view themselves as the supreme race in the universe, intent on purging the universe of all non-Dalek life. Collectively they are the greatest enemies of Doctor Who's protagonist, the Time Lord known as "the Doctor". Later in the programme's run, the Daleks acquired time travel technology and engaged the Time Lords in a brutal Time War affecting most of the universe, with battles taking place across all of history.
They are the show's most popular villains and their returns to the series over the decades have gained media attention and their frequent order to "Exterminate!" has become common usage.
Physical characteristics
Externally, Daleks resemble human-sized pepper pots with a single mechanical eyestalk mounted on a rotating dome, a gun mount containing an energy weapon ("gunstick" or "death ray") resembling an egg whisk, and a telescopic manipulator arm usually tipped by an appendage resembling a sink plunger. Daleks have been known to use their plungers to interface with technology, crush a man's skull by suction, measure the intelligence of a subject, and extract information from a man's mind. Dalek casings are made of a bonded polycarbide material called "dalekanium" by a member of the human resistance in The Dalek Invasion of Earth and by the Cult of Skaro in "Daleks in Manhattan".
The lower half of a Dalek's shell is covered with hemispherical protrusions, or "Dalek bumps", which are shown in the episode "Dalek" to be spheres embedded in the casing. Both the BBC-licensed Dalek Book (1964) and The Doctor Who Technical Manual (1983) describe these items as being part of a sensory array, whilst in the 2005 series episode "Dalek", they are integral to a Dalek's self-destruct mechanism. Their armour has a forcefield that evaporates most bullets and resists most types of energy weapons. The forcefield seems to be concentrated around the Dalek's midsection (where the mutant is located), as normally ineffective firepower can be concentrated on the eyestalk to blind a Dalek. Daleks have a very limited visual field, with no peripheral sight at all, and are relatively easy to hide from in fairly exposed places. Their own energy weapons are capable of destroying them. Their weapons fire a beam that has electrical tendencies, is capable of propagating through water, and may be a form of plasma or electrolaser. The eyepiece is a Dalek's most vulnerable spot; impairing its vision often leads to a blind, panicked firing of its weapon while exclaiming "My vision is impaired; I cannot see!" Russell T Davies subverted the catchphrase in his 2008 episode "The Stolen Earth", in which a Dalek vaporises a paintball that has blocked its vision while proclaiming "My vision is not impaired!"
The creature inside the mechanical casing is soft and repulsive in appearance and vicious in temperament. The first-ever glimpse of a Dalek mutant, in The Daleks, was a claw peeking out from under a Thal cloak after it had been removed from its casing. The mutants' actual appearance has varied, but often adheres to the Doctor's description of the species in Remembrance of the Daleks as "little green blobs in bonded polycarbide armour". In Resurrection of the Daleks a Dalek creature, separated from its casing, attacks and severely injures a human soldier; in Remembrance of the Daleks, there are two Dalek factions (Imperial and Renegade) and the creatures inside have a different appearance in each case, one resembling the amorphous creature from Resurrection, the other the crab-like creature from the original Dalek serial. As the creature inside is rarely seen on screen, a common misconception exists that Daleks are wholly mechanical robots. In the new series Daleks are retconned to be mollusc-like in appearance, with small tentacles, one or two eyes, and an exposed brain. In the new series, a Dalek creature separated from its casing is shown capable of inserting a tentacle into the back of a human's neck and controlling them.
Daleks' voices are electronic; when out of its casing the mutant is only able to squeak. Once the mutant is removed, the casing itself can be entered and operated by humanoids; for example, in The Daleks, Ian Chesterton (William Russell) enters a Dalek shell to masquerade as a guard as part of an escape plan.
For many years it was assumed that, due to their design and gliding motion, Daleks were unable to climb stairs, and that this was a simple way of escaping them. A cartoon from Punch pictured a group of Daleks at the foot of a flight of stairs with the caption, "Well, this certainly buggers our plan to conquer the Universe". In a scene from the serial Destiny of the Daleks, the Doctor and companions escape from Dalek pursuers by climbing into a ceiling duct. The Fourth Doctor calls down, "If you're supposed to be the superior race of the universe, why don't you try climbing after us?" The Daleks generally make up for their lack of mobility with overwhelming firepower; a joke among Doctor Who fans says "Real Daleks don't climb stairs; they level the building." Dalek mobility has improved over the history of the series: in their first appearance, The Daleks, they were capable of movement only on the conductive metal floors of their city; in The Dalek Invasion of Earth a Dalek emerges from the waters of the River Thames, indicating that they not only had become freely mobile, but are amphibious; Planet of the Daleks showed that they could ascend a vertical shaft by means of an external anti-gravity mat placed on the floor; Revelation of the Daleks showed Davros in his life-support chair and one of his Daleks hovering and Remembrance of the Daleks depicted them as capable of hovering up a flight of stairs. Despite this, journalists covering the series frequently refer to the Daleks' supposed inability to climb stairs; characters escaping up a flight of stairs in the 2005 episode "Dalek" made the same joke, and were shocked when the Dalek began to hover up the stairs after uttering the phrase "ELEVATE", in a similar manner to their normal phrase "EXTERMINATE".
In ST:TOS The Menagerie, Part I, Fleet Captain Pike was paralyzed by a burst of delta-rays and is confined to a wheelchair. His only communication is by a flashing light on the chair: one blink for yes, two for no. I guess he doesn't know Morse code.
In ST:TNG Too Short a Season Admiral Mark Jameson is confined to a support chair due to Iverson's Disease
A man-amplifier for a disabled person's arms and legs are a standard prosthesis. But if the amplifier is to replace or support internal organs, this becomes more a medical cyborg. As previously mentioned there is no hard line between the two types.
MEDICAL CABINET
Compton’s leonine head protruded from what was very like a steam cabinet on wheels. In that cabinet were devices to assist his silicotic lungs, his sclerotic blood vessels, and a nervous system so badly deranged that even several years ago Runner had detected the great man in fits of spastic trembling. And God knew what else might be going wrong with Compton’s body that Compton’s will would not admit.
Compton grinned at him. Almost simultaneously, a bell chimed softly in the control panel on the back of the cabinet. The cadet aide sprang forward, read the warning in some dial or other and made an adjustment in the settings of the control knobs. Compton craned his neck in its collar of loose gray plastic sheeting and extended his grin to the boy. “Thank you, Cadet. I thought I was starting to feel a little dizzy.”
At any rate, in spite of my early age (six years old), an embolism somehow developed and major damage to my heart resulted. It was here that the great wealth of my parents proved invaluable. Prognosis was entirely unfavorable for me. The routine procedure for a three-offspring couple would have been to cancel the unsuccessful quota and reissue it for immediate production. However, it was too late to arrange for twins in their second quota and my parents decided to attempt to salvage me. An artificial heart was prepared and substituted for the original. It had a built-in atomic battery which would require renovation no oftener than every twenty years. Voluntary control was provided through connection with certain muscles in my neck, and I soon learned to operate it at least as efficiently as a normal heart with the normal involuntary controls. The mechanism was considerably bigger than the natural organ, but the salvage operation was a complete success. The bulge between my shoulder blades for the battery and the one in front of my chest for the pump were not excessively unsightly. I entered the Princeton Second Stage Creche for Greatly Superior Children on time, being accepted without objection in spite of my pseudo-deformity. In spite of the best efforts and assurances of the creche psychologists, there was naturally a certain lack of initial acceptance of me by some of my creche mates. However, they soon became accustomed to my fore-and-aft bulges, and since I had greater endurance than they, with voluntary control over my artificial heart, I eventually gained acceptance, and even a considerable measure of leadership—insofar as leadership by an individual is possible in a creche. Shortly after the beginning of my fourth year at the Princeton Creche, the second great personal disaster struck. Somehow or other—the cause has not been determined to this day—my artificial heart went on the blink. I did not quite die immediately, but the prognosis was once again entirely unfavorable. Considerable damage had somehow eventuated to my lungs, my liver and my kidneys. I was a mess. By this time, my parents had made such a huge investment in me, and my progress reports had been so uniformly excellent, that in spite of all the advice from the doctors, they determined to attempt salvage again. A complete repackaging job was decided upon. Blood was to be received, aerated, purified and pumped back to the arterial system through a single mechanism which would weigh only about thirty-five pounds. Of course, this made portability an important factor. Remember that I was only ten years old. I could probably have carried such a weight around on my back, but I could never have engaged in the proper development of my whole body and thus could never have been accepted back again by Princeton. It was therefore determined to put the machinery into a sort of cart, which I would tow around behind me. Wheels were quickly rejected as being entirely unsatisfactory. They would excessively inhibit jumping, climbing and many other boyish activities. The manufacturers finally decided to provide the cart with a pair of legs. This necessitated additional machinery and added about twenty-five pounds to the weight of the finished product. They solved the problem of how I would handle the thing with great ingenuity by making the primary control involuntary. They provided a connection with my spinal cord so that the posterior pair of legs, unless I consciously ordered otherwise, always followed in the footsteps of the anterior pair. If I ran, they ran. If I jumped, they jumped. In order to make the connection to my body, the manufacturers removed my coccyx and plugged in at and around the end of my spinal column. In other words, I had a very long and rather flexible tail, at the end of which was a smoothly streamlined flesh-colored box that followed me around on its own two legs. A human has certain normally atrophied muscles for control of his usually non-existent tail. Through surgery and training, those muscles became my voluntary controllers for my tail and the cart. That is, I could go around waggin' my tail while draggin' my wagon. Well, the thing actually worked. You should have seen me in a high hurdle race—me running along and jumping over the hurdles, with that contraption galloping along right behind me, clearing every hurdle I cleared. I kept enough slack in my tail so I wouldn't get pulled up short, and then just forgot about it. Going off a diving board was a little bit different. I learned to do things like that with my back legs under voluntary control. Speaking of diving boards, maybe you wonder how I could swim while towing a trailer. No trouble at all. I would just put my tail between my legs and have my cart grab me around the waist with a kind of body scissors. The cart's flexible air sac was on its top when it was in normal position, so this held it away from my body, where it would not get squeezed. I would take in just enough air so that it was neutrally buoyant, and with its streamlined shape, it didn't slow me down enough to notice. I usually "breathed"—or took in my air—through the intakes of the cart, and they stayed under water, but there was an air connection through my tail up to the lung cavity anyway, allowing me to talk. So I just breathed through my mouth in the old-fashioned way. Backing up was rather a problem, with my posterior legs leading the way, and dancing was nearly impossible until I got the idea of having my trailer climb up out of the way onto my shoulders while I danced. I sometimes believe that I may be considered to be what is occasionally called an "accident-prone." I seem to have had more than my share of tough luck. During my last year at Princeton, I got my throat cut. It was an accident, of course. No Princeton man would ever dream of doing away with someone he had taken a dislike to quite so crudely. Or messily. By voluntary control of my heart, I slowed the action down to the point where I managed to keep from bleeding to death, but my larynx was destroyed beyond repair. That was when I got my Voder installation. It fitted neatly where my lungs used to be, and because it used the same resonant cavities, I soon learned to imitate my own voice well enough so that nobody could tell the difference, "before" or "after." The cart containing my organs didn't get in my way too much. With my athletic days behind me, I taught it to come to heel instead of striding along behind me. It was less efficient, but it was a lot less conspicuous. I had a second involuntary control system built in so it would stay at heel without conscious thought on my part, once I put it there. In my office, I would have it curl up at my feet like a sleeping dog. It was about that time that I drank the bottle of acid. Nobody was trying to poison me. I wasn't trying to kill myself, either. Not even subconsciously. I was just thirsty. All I can say is I did a first rate job with what was left of my insides. Well, they salvaged me again, and what I ended up with was a pair of carts, one trotting along beside each heel. The leash for the second one was plugged into me in front instead of in the back, naturally, but with my clothes on, nobody could tell, just by looking, that they were attached to me at all. The doctors offered to get me by without the second trailer. They figured they could prepare pre-digested food and introduce it into my bloodstream through the mechanism of my original wagon. I refused to let them; I had gotten too used to eating. So whatever I ate was ground up and pumped into my new trailer—or should it be "preceder"? There it would be processed and the nutriments passed into my bloodstream as required. I couldn't overeat if I tried. It was all automatic, not even hooked into my nervous system. Unusable products were compressed and neatly packaged for disposal at any convenient time. In cellophane. There was, of course, interconnection inside of me between the two carts. Oh, yes—about swimming. I still enjoyed swimming and I worked it out this way: Wagon number two replaced number one in straddling me, and wagon number one hung onto number two. It slowed me down, but it still let me swim. I quit diving. I couldn't spare the time to figure out how to manage it.
In some science fiction, people are modified into cyborgs not for dull boring reasons like allowing spacecraft designers to scrimp on life-support. Cyborg implants can give people superhero-like powers. Especially combat powers, the military is always interested in creating super-soldiers.
Cyborg is the story of an astronaut and test pilot, Steve Austin, who experiences a catastrophic crash during a flight, leaving him with all but one limb destroyed, blind in one eye, and with other major injuries.
At the same time, a secret part of the American government, the Office of Strategic Operations (OSO) has taken an interest in the work of Dr. Rudy Wells concerning bionics - the replacement of human body parts with mechanical prosthetics that (in the context of this novel) are more powerful than the original limbs. Wells also happens to be a good friend of Austin's, so when OSO chief Oscar Goldman "invites" (or rather, orders) Wells to rebuild Austin with bionics limbs, Wells agrees.
Steve Austin is outfitted with two new legs capable of propelling him at great speed, and a bionic left arm with almost human dexterity and the strength of a battering ram. One of the fingers of the hand incorporates a poison dart gun. His left eye is replaced with a false, removable eye that is used (in this first novel) to house a miniature camera. Other physical alterations include the installation of a steel skull plate to replace bone smashed by the crash, and a radio transmitter built into a rib. This mixture of man and machine is known as a cyborg, from which the novel gets its title.
The first half of the novel details Austin's operation and both his reaction to his original injuries—he attempts to commit suicide—and his initially resentful reaction to being rebuilt with bionic prosthetic hardware. The operation has a price: Austin is committed to working for the OSO as a reluctant agent. The second half of the novel describes Austin being teamed with an already experienced female operative, and his mission to the Middle East as both spy and weapon. Austin, already coming to appreciate his bionic implants, relies heavily on his augmentation during the mission and by the end accepts his role.
Beran awoke in puzzlement to find himself not in his pink and black bed. After contemplating his position, he felt relatively cheerful. The future promised to be interesting, and when he returned to Pao he would be equipped with all the secret lore of Breakness.
He rose from the bunk, shared breakfast with Palafox who seemed to be in high spirits. Beran took sufficient courage to put a few further inquiries. “Are you actually a wizard?”
“I can perform no miracles,” said Palafox, “except perhaps those of the mind.”
“But you walk on air! You shoot fire from your finger!”
“As does any other Breakness dominie.”
Beran looked wonderingly at the long keen visage. “Then you are all wizards?”
“Bah!” exclaimed Palafox. “These powers are the result of bodily modification. I am highly modified.”
Beran’s awe became tinged with doubt. “The Mamarone are modified, but …”
Palafox grinned down at Beran like a wolf. “This is the least apt comparison. Can neutraloids walk on air?”
“No.”
“We are not neutraloids,” said Palafox decisively. “Our modifications enhance rather than eliminate our powers. Anti-gravity web is meshed into the skin of my feet. Radar in my left hand, at the back of my neck, in my forehead provides me with a sixth sense. I can see three colors below the red and four over the violet. I can hear radio waves. I can walk under water, I can float in space. Instead of bone in my forefinger, I carry a projection tube. I have a number of other powers, all drawing energy from a pack fitted into my chest.”
Beran could not grasp this; however, he was impressed by Fanchiel’s manner. “What will I learn at the Institute?”
“A thousand things — more than I can describe to you. In the College of Comparative Culture — where Lord Palafox is Dominie — you will study the races of the universe, their similarities and differences, their languages and basic urges, the specific symbols by which you can influence them.
“In the College of Mathematics you learn the manipulation of abstract ideas, various systems of rationality — likewise you are trained to make quick mental calculations.
“In the College of Human Anatomy you learn geriatry and death prevention, pharmacology, the technique of human modification and augmentation — and possibly you will be allowed one or two modifications.”
Beran’s imagination was stimulated. “Could I be modified like Palafox?”
“Ha hah!” exclaimed Fanchiel. “This is an amusing idea. Are you aware that Lord Palafox is one of the most powerfully modified men of Breakness? He controls nine sensitivities, four energies, three projections, two nullifications, three lethal emanations, in addition to miscellaneous powers such as the mental slide-rule, the ability to survive in a de-oxygenated atmosphere, anti-fatigue glands, a sub-clavicle blood chamber which automatically counteracts any poison he may have ingested. No, my ambitious young friend!”
Palafox spoke on in a more conciliatory tone. “These affairs are for the future, and need not concern us now. At the present we are allies. To signalize this fact, I have arranged that a modification be made upon your body, as soon as we arrive at Pon.”
Beran was taken by surprise. “A modification?” He considered a moment, feeling a qualm of uneasiness. “Of what nature?”
“What modification would you prefer?” Palafox asked mildly.
Beran darted a glance at the hard profile. Palafox seemed completely serious. “The total use of my brain.”
“Ah,” said Palafox. “That is the most delicate and precise of all, and would require a year of toil on Breakness itself. At Pon it is impossible. Choose again.”
“Evidently my life is to be one of many emergencies,” said Beran. “The power of projecting energy from my hand might prove valuable.”
“True,” reflected Palafox. “And yet, on the other hand, what could more completely confuse your enemies than to see you rise into the air and float away? And since, with a novice, the easy projection of destruction endangers friends as well as enemies, we had better decide upon levitation as your first modification.”
(Felix Severance said) “All right. Let’s begin with the world situation.” (John Bravais said) “I’d prefer a more cheerful subject — like cancer.” “We may get to that, too, before this one’s over.” He hitched himself forward, getting down to business. “For most of the last century, John, the world has been at war. We haven’t called it that, of course — nobody’s actually used nuclear warheads. These are nothing but ‘police actions,’ or ‘internal power realignments,’ like the current rumble here in Algeria — maneuvers with live ammunition. But while the powers are whetting their claws on these tupp’ny-‘ap’ny shooting matches, they’re looking hard for a weapon that would give one state a decisive advantage. In the meantime — stalemate.” “Well,” I said, pushing back my chair, “that was mighty interesting, Felix. Thanks for letting me know — “ He leaned across the table. There was a merry glint in his eye; he looked like a devil planning a barbecue. “We’ve found that weapon, John.” I settled back into my chair. “All right, I’m listening.”
“Very well: Super Hellbombs are out. The answer lies in the other direction, of course. A crowd of infantrymen killing each other isn’t war — it’s good, healthful sport — just the ticket for working off those perfectly natural aggressions that might otherwise cause trouble. But what if a division or two of foot soldiers suddenly became irresistible? Impervious to attack, deadly on the offensive? Your cozy little brushfire war would turn into a rout for the unlucky side — and there would go your power-balance, shot all to hell — “ “How much better can hand-weapons get? The Norge Combat Imperial weighs six pounds and fires a hundred armor-piercing rounds per second. It’s radar-aimed and dead-accurate — “
“I’m talking about something new, John. We call it PAPA — Power Assisted Personal Armament. What it means is — the Invulnerable Man.” I watched Felix swallow half his drink, put the glass down, and sit back with his fingertips together, waiting for my reaction. I nodded casually. “That’s an old idea,” I said carelessly. “I used to follow Batman and Robin myself.” “This isn’t a Tri-D drama — it’s a coordinated development in bioprosthetics, neurosurgery, and myoelectronics. Picture it, John! Microtronics-engineered sense-boosters, wide-spectrum vision, artificially accelerated reflexes, nerve-energy laser-type weapons, all surgically implanted — plus woven-chromalloy body-mail, aligned-crystal metal caps for finger-bones, shins, rib and skull, servo-boosted helical titanium fiber reinforced musculature — “ “You left out the fast-change long-Johns with the big red S on them. You know, I always wondered why dark Kent never got himself arrested in an alley for indecent exposure.” “I had a hand in its development myself,” Felix went on, ignoring me. “And I can tell you it’s big. You have no idea — “
“Never fear, John. You won’t be unprotected.” There was a merry glint in his eye. “You won’t merely have a new identity — I’m going to fit you out with full PAPA gear. If a General Julius jumps out at you then, just break him in two and keep going.”
I was sitting on the edge of a wooden chair, listening to a thin humming in my head. “Tell me when the sound stops,” Felix said. His voice seemed to be coming from a distance, even though I could see him standing a few feet away, looking hazy, like a photograph shot through cheesecloth. The buzzing grew fainter, faded … I pressed the switch in my hand — Felix’s blurred features nodded. “Good enough, John. Now come around and let’s check those ligament attachments.” I relaxed the muscles that had once been used to prick up the ears, thus switching my hearing range back to normal. I made a move to rise, and bounded three feet in the air. “Easy, John.” Felix had emerged from the cubicle with the two-inch-thick armorplast walls. “We can’t have you springing about the room like a dervish. Remember your lessons.” I balanced carefully, like a man with springs tied to his shoes. “I remember my lessons,” I said. “Pain has a way of sticking in my mind.” “It’s the best method when you’re in a hurry.” “How did the test go?” “Not badly at all. You held it to .07 microbel at 30,000 cycles. How was the vision?” “About like shaving with a steamed mirror. I still get only blacks and whites.” “You’ll develop a color discrimination after a while. Your optic center has been accustomed to just the usual six hues for thirty-odd years: it can’t learn to differentiate in the ultraviolet range overnight.”
“And I can’t adjust to the feeling that I weigh half an ounce, either, dammit!, I dance around on my toes like a barefooted hairdresser on a hot pavement.” Felix grinned as though I’d paid him a compliment. “In point of fact, you now weigh three hundred and twenty-eight pounds. I’ve plated another five mills of chromalloy onto the skeletal grid. Your system’s shown a nice tolerance for it. I’m pulling one more net of the number nine web over the trapezius, deltoids, and latissimi dorsi — “ “The tolerances of my metabolism are not to be taken as those of the management,” I cut in. “These past six weeks have been a vivisectionist’s nightmare. I’ve got more scars than a Shendy tribesman, and my nerves are standing on end, waving around like charmed snakes. I’m ready to call it a day, and try it as is.” Felix nodded soberly. “We’re about finished with you. I know it’s been difficult, but there’s no point in taking anything less than our best to the fray, is there?”
“I don’t know why I don’t ache all over,” I grumbled. “I’ve been sliced, chiseled, and sawed at like a side of beef in a butcher’s college. I suppose you’ve got me doped to the eyebrows; along with all the other strange sensations, a little thing like a neocaine jag would pass unnoticed.” “No — no dope; hypnotics, old boy.” “Swell. Every day in every way I’m hurting less and less, eh?” I took a breath, more from habit than need; the oxygen storage units installed under the lower edge of my rib-cage were more than half charged; I could go for another two hours if I had to. “I know we’re in a hell of a spot — and it’s better to sail in with grins in place and all flags flying than sit around telling each other the crisis has arrived. But I'm ready for action.” Felix was looking at papers, paying no attention at all. “Surely, old man. Gripe all you like,” he said absently. “Just don’t get friendly and slap me on the back. I’m still made of normal flesh and blood. Now, I’d like another check on the strain gauges.”
I closed my mouth and went across to the Iron Man — a collection of cables and bars that looked like an explosion in a bicycle factory. “The grip, first.” I took the padded handle, settled my hand comfortably, squeezed lightly to get the feel of it, then put on the pressure. I heard a creak among the levers; then the metal collapsed like cardboard in my hand. I let go. “Sorry, Felix — but what the hell, thin-gauge aluminum — “ “That’s a special steel tubing, cold-extruded, two tenths of an inch thick,” Felix said, examining the wreckage. “Try a lift now.” I went over to a rig with a heavy horizontal beam. I bent my knees, settled my shoulders under it with a metal-to-wood clatter. I set myself, slowly straightened my legs. The pressure on my shoulders seemed modest — about like hefting a heavy suitcase. I came fully erect, then went up on my toes, pushing now against an almost immovable resistance. “Slack off, John,” Felix called. “I believe I’ll consider you’ve passed your brute-strength test. Over twenty-nine hundred pounds — about what a Chevette runabout weighs — and I don’t think you were flat out, at that.” “I could have edged a few ounces more.” I flexed my shoulders. “The padding helped, but it wasn’t quite thick enough.” “The padding was two inches of oak.” He looked at me, pulling at his lower lip. “Damned pity I can’t take you along to the next Myoelectronics Congress; I could make a couple of blighters eat two-hour speeches saying it wasn’t possible “
I took a turn up and down the room, trying not to bounce at each step. “Felix, you said another week, to let the incisions heal Let’s skip that: I’m ready to go now. You’ve been in town every day and haven’t seen any signs of abnormal activity The alarm’s died down.” “Died down too damned quickly to suit me,” he snapped “It’s too quiet. At the least, I’d have expected someone out to check over the house. You’ll recall that the former tenant my alter ego, turned in a report on missing men and head wounds. But they haven’t been near the place. There’s been nothing in the papers since the first day or two — and I daresay it wouldn’t have been mentioned then, except that a crowd of idlers saw you kill Julius.” “Look, Felix; I’ve got so damned much microtronics gear buried in my teeth I’m afraid to eat anything tougher than spaghetti; I’ve got enough servo-motors bolted to my insides to power an automatic kitchen. Let’s skip the rest of the program and get going. I may have new stainless-steel knuckles, but it’s the same old me inside. I’m getting the willies. I want to know what those hell-hounds are doing up there.”
The bus came trundling up on its sixteen pneumatic
tires, beeping slightly as it stopped. I'm not sure why it
was beeping, but I had a feeling it had something to do
with safety regulations. I waited as the women climbed
aboard, then I followed. I was a little shocked to see a
human driver instead of a comp. I asked him where the
museum was and told him to nudge me when we got
near and he said he would. The bus was filled ahnost entirely with women getting off work. They probably
thought I was insane, since I was obviously going into
their city.
But I didn’t care what they thought. I wasn’t worried
because I wasn’t taking an extraordinary risk. A normal
Spacer would have been too afraid to enter the town
near a Strip at night. I’m not. I’m utterly confident that
I can take care of anyone I meet on a Frontier World.
I’m modified. I had it done on Reega in 307 Central
Standard Year, before it became illegal. It’s all on my
ID and the papers can’t be changed back. Neither can I.
I had my entire nervous system altered, plus a few little
goodies were added to make me positvely sure of
myself. It was incredibly expensive, and it took six months
to get used to the way of activating the fight mode.
But I learned.
When I activate, I have fangs that are an inch long
and razor sharp. I also get claws on my hands and feet
that are three inches, all razor sharp. My strength is increased three times normal, and my reaction speed is
boosted six times my norm. My eyes are also adjusted to
infra-red or ultra-violet, whichever I need. I have ultraviolet projectors in my cheekbones that can be activated, if need be. I’m not sure how the fangs and the
other stuff works, since the fangs and claws are silver
bright, but if I’m relaxed, my teeth, fingernails, and
toenails are normal. If I knew how they worked, I guess
I’d be a Reegan. And I sure wouldn’t have to be
scrambling for a living out among the Frontier Worlds.
I knew that in my fight mode, my body was burning
up calories like mad, since my metabolism was tripled.
I would tire very quickly, unless I ate like a pig, and the
food I ate would have to be very high in protein. My
stomach could only hold so much fuel. That worried
me.
I shoved through the leaves, and slipped. through the
muck of the jungle floor. The birds were back, squawking away, testifying to all who could hear that I was
among them. The heat was intolerable, but I didn’t let
that stop me, since old-fashioned fear and the instinct
for survival kept me going. Sweat was staining my
jumpsuit. I wiped the sweat from my forehead from
time to time just to keep it from stinging into my eyes. I
was gasping for breath, and I felt a little weak. In the
fight mode, that’s the first danger signal that your body
is beginning to starve for food. I’d used it too often
since my last meal. I would have to stop and rest for a
bit, but if I did stop, I ’d go into a coma that would last
anywhere from an hour to days. I knew I couldn’t risk
that.
I deactivated.
I sank to my knees as exhaustion roared over me like
a tidal wave. I hung my head, scooping deep lungfuls of
wet, humid air into my aching lungs. The trees gave
shade but no comfort from the steaming heat.
Robot: A man amplifier, powered armor, or mecha where the operator is a computer instead of a human being.
OPR: Comp App are Robot Appliances, only capable of perform pre-programmed tasks and stealing jobs from automobile construction workers.
OPR: Comp AI are Robot Synthetic Organism; and are disturbing, Asimov's Four Laws of Robotics notwithstanding.
If COM: is anything but NON, then it is a Combat Robot.
It would be so much more convenient to use an all robot crew. Robots do not require life support, and some types can be considered expendable. Unfortunately there is Burnside's Zeroth Law
ROBOTS. These have mostly disappeared, except for a few amusing ones in Star Wars movies, and the recent proliferation of GIANT WAR ROBOTS. Apart from these, the decline of Robots is striking, and my guess is that it happened for two reasons.
1) They have made so little progress in the real world. ("Industrial Robots" don't count as real Robots.) I'm typing this on a computer vastly more powerful than the enormous Central Computers of 1950s SF, but I still don't have a household Robot to do the dishes. AI, needed for real Robots, hasn't much panned out, so people have tended to cool on the whole thing.
2) Isaac Asimov. He ruined it for the old-fashioned malevolent Robots, and pretty much exhausted the possibilities of the other kind. Even HOLLYWOOD SCIFI hardly uses traditional Robots any more, though Giant War Robots will doubtless turn up soon at a 50-plex near you.
When Robots do appear in written SF, TECHJARGON may shorten the term to simply Bots.
(ed note: In the old days the term "Android" was shortened to simply "Droid", but now the term has been copyrighted by George Lucas and he'll sic his lawyers on you.)
In principle Defiant was a better ship than she'd been when she left New Chicago. The engineers had automated all routine spacekeeping tasks, and no United Republic spacer needed to do a job that a robot could perform. Like all of New Chicago's ships, and like few of the Imperial Navy's, Defiant was as automated as a merchantman.
Colvin wondered. Merchantmen do not fight battles. A merchant captain need not worry about random holes punched through his hull. He can ignore the risk that any given piece of equipment will be smashed at any instant. He will never have only minutes to keep his ship fighting or see her destroyed in an instant of blinding heat.
No robot could cope with the complexity of decisions damage control could generate, and if there were such a robot it might easily be the first item destroyed in battle. Colvin had been a merchant captain and had seen no reason to object to the Republic's naval policies, but now that he had experience in warship command, he understood why the Imperials automated as little as possible and kept the crew in working routine tasks: washing down corridors and changing air filters, scrubbing pots and inspecting the hull. Imperial crews might grumble about the work, but they were never idle. After six months, Defiant was a better ship, but...
From "REFLEX" by Larry Niven and Jerry Pournelle (1982)
gosh but like we spent hundreds of years looking up at the stars and wondering “is there anybody out there” and hoping and guessing and imagining
because we as a species were so lonely and we wanted friends so bad, we wanted to meet other species and we wanted to talk to them and we wanted to learn from them and to stop being the only people in the universe
and we started realizing that things were maybe not going so good for us— we got scared that we were going to blow each other up, we got scared that we were going to break our planet permanently, we got scared that in a hundred years we were all going to be dead and gone and even if there were other people out there, we’d never get to meet them
and then
we built robots?
and we gave them names and we gave them brains made out of silicon and we pretended they were people and we told them hey you wanna go exploring, and of course they did, because we had made them in our own image
and maybe in a hundred years we won’t be around any more, maybe yeah the planet will be a mess and we’ll all be dead, and if other people come from the stars we won’t be around to meet them and say hi! how are you! we’re people, too! you’re not alone any more!, maybe we’ll be gone
but we built robots, who have beat-up hulls and metal brains, and who have names; and if the other people come and say, who were these people? what were they like?
the robots can say, when they made us, they called us discovery; they called us curiosity; they called us explorer; they called us spirit. they must have thought that was important.
The guide waved at the next display, "And this... this is a special piece. You're lucky! We're only allowed to show you this at one solar position of one particular planet. Silence now, here it comes..."
A soft, tinny music filled the suddenly silent space by the display. It was awkward, almost hesitant, as if it wasn't quite sure it was meant to be music at all. And yet, the crowd stared, straining for the notes, silent and still until silence again filled the hall. With the sound gone, the audience again focused on their guide and personal translators.
"Ah. That never gets old. This piece is more than a nine-hundred year-old relic, it is a symbol. The young often ask why there are so few requirements to enter the Galactic Union. This is why. This is piece of a culture so impatient to see the stars it hurled devices out into them. Not so different than many of our cultures, yes? Ah, but see, this planet was still in its infancy, at war with itself, a candle still at risk of snuffing itself out. And yet, they sent this to a nearby, uninhabitable planet. Just to see." The guide paused, "But that is not the most wondrous thing."
"The device you see here, is not autonomous. A simple, 'robot' that took commands directly from the home planet and relayed back information. A machine, nothing more." Again a pause, "And yet. This culture programmed this simple, data gathering machine, to make music. And not just any music, but a song played when the solar position approximated that of an individual's genesis."
"The humans have been members of the Galactic Union for over eight-hundred years. They bear little resemblance to the ones who built this device, which they named — NAMED, Opportunity. But they still have that unique trait they brought to the Union, as all species bring something unique. Though the humans had not realized it yet themselves, as they gave their machines names of hope and flung them into the stars, programmed them to play music, and mourned them when they went cold, the Union saw their potential."
The guide waved an arm to encompass the room, "Yes. Humans. Our great peacemakers, were once at risk of destroying themselves. Yet even then, their empathy was so great they mourned not only for a species not their own, but for an inanimate machine that 'survived' more than sixty times longer than expected. They listened, long after it had passed into silence, waiting to make sure it did not pass alone, as they would a living family member."
The guide turned back to the machine, now silent again, "And the humans returned to recover this simple machine and still, nine-HUNDRED years later, allow us only to send the command to play this music, 'happy birthday' when the sun of their homeworld approximates the position it did then. They are... a special race to be sure. And this 'Opportunity' is a symbol of that. Antiquated and clumsy technology, but a symbol of an empathy deep enough to unite the Galactic Union, and keep it strong, peaceful, and expanding."
The crowd paused, considering, then moved on to the next museum exhibit, leaving one lone figure staring at the display.
Softly, even softer than the music, it spoke. "Of course we came back. Good job, Oppy. Who's the best little rover?" The figure smiled, waved as if at the silent machine, and turned to follow the group.
The above is an unedited first-draft written as I watched messages spread across the web of Opportunity's last message, "My battery is low and it's getting dark." and a universal mourning. But it struck me as people were sad that Oppy passed, "alone" that it was the opposite.
Like a beloved pet, we sat with Oppy as it went to sleep for the final time. We listened, long after, to be sure that it didn't wake up alone. And it struck me that that is a truly AMAZING thing, to invest so much, to care SO much about something inanimate. And so, I wrote this.
Because I see a lot of hope in this. If we can just get past all the other stuff, humans are AMAZING. And yeah, if we get to the stars? You know we're totally gonna go back for Oppy. 'Cause humans are big emotional saps. And maybe that's our strength.
All of it. Much of the automation, autofac segments, and other component-type robots are bricks. Utility spiders and other functional motiles are robo-monkeys. More sophisticated robots, like the coordinating members of a pack of utility spiders, are idiot-savant average joe androids. Thinkers and digisapiences are Nobel-bots, which puts them on a similar level to people augmented with the usual intelligence-augmentation technology. And, of course, the Transcend, its archai, and certain other major systems qualify as Dei Ex Machinae.
This is, of course, complicated via networking (all those bricks and robo-monkeys are part of/under the command of more sophisticated systems all the time), the existence of systems which are themselves parts of other systems, and so forth, but is true enough for approximation.
I’m not an arachnophobe. Not, dammit. I had that taken out years ago, I’ll have you know.
And I know all the good reasons why your repair-clanks are the shape they are. Multiple legs for maximum flexibility of stance and attachment and wielding many tools at once. Multiple eyes to examine a work-piece from all angles and in several different spectra. A rounded central body to minimize the possibility of scratches from sharp corners.
And that’s not hair. It’s just that branching fractal nanomanipulators look… fuzzy, to the naked eye.
But put a couple of dozen of them in one place, all swarming over the job together chittering at each other in modulated-binary, and…
Well, anyway. You just take care of it as you see fit, and I’ll sign off on it when I get back. I’m off to see a soph about some follow-up psychedesign.
About this time is where all commentators bring up Isaac Asimov's famous Four Laws of Robotics:
A robot may not harm humanity, or, by inaction, allow humanity to come to harm.
A robot may not injure a human being or, through inaction, allow a human being to come to harm, except where such orders would conflict with the Zeroth Law.
A robot must obey the orders given it by human beings except where such orders would conflict with the Zeroth or First Law.
A robot must protect its own existence as long as such protection does not conflict with the Zeroth, First, or Second Laws.
Such robots who are constrained by these laws are called Asenion robots (using a deliberately misspelled version of Asimov's name).
Obviously robots subjugated by the laws cannot be Combat Robots, since the very concept of combat is forbidden by the First Law.
According to Asimov, in 1942 he was fed up with the robot stories from other authors that were all a re-hash of that stale old "Frankenstein" and "Faust" theme (often with a side order of "the robot as pathos"). He wanted to write about sympathetic robots, and formulated the laws to have the desired effect. He also invented the word "robotics" while he was at it.
Not that these laws would make a robot behave perfectly. Asimov milked the flaws for all they were worth, writing a large number of stories about how the laws could interfere with each other and create unintended consequences. The laws were embraced by so many other SF authors that some actually think they are laws of nature. TV Tropes has a huge section about this particular trope. In fact, the laws often appear in popular culture.
In reality it is not particularly a problem to create a robot lacking any or all of the laws. For instance, you'd want to leave out law 0 and law 1 if you were making a soldier robot, otherwise it would be sort of useless. And you can be certain that the Terminators do not have any of the laws at all.
Video clip from Dark Star, of Doolittle frantically trying to teach the bomb phenomenology.
click to play video
DARK STAR
(ed note: Doolittle, Pinback, Boiler, Talby, and the frozen body of Captain Powell are on board the spaceship Dark Star. Their job is to use thermostellar devices {bombs} to destroy unstable planets and thus render solar system suitable for colonization. There is an accident at the last FTL jump. The last bomb {#20} is activated, the count-down is started, the bomb release arm is fused solid, the bomb is refusing to stop the count-down, and everybody will die when the bomb detonates. The bomb contains a smart but naive AI. Dolittle frantically goes to the frozen body of Captain Powell and asks him for help. Captain Powell tells Dolittle to teach the bomb phenomenology.)
Like the rest of the starsuit, Doolittle's jet pack was working perfectly. Maybe it was a sign that things were finally breaking their way. A couple of spurts brought him around and then beneath the ship. Then he was approaching the bomb.
He stopped a couple of meters away from its back end, where the tiny thrusters were located. He had checked the circuits beforehand and his suit's broadcast unit should be operating on open channel, which meant the bomb would pick it up. There was no guarantee ii would even listen to him, but if it would talk to Pinback...
Odd how harmless it looked. A long white rectangular box, looking more like a large shipping crate than anything else. He felt he could take it apart with a crowbar and find nothing inside. Certainly nothing capable of setting off a chain reaction in the core of a planet.
Certainly nothing that even powerful dampers could only hold to a total destruct radius of one kilometer.
"Hello, bomb," he ventured into the suit mike. "Are you with me?"
"Of course," the bomb replied brightly, as though they had been talking for hours. Inwardly Doolittle breathed a little freer. At least he was getting through.
"Uh ... are you willing to entertain a few speculative philosophical concepts, bomb?"
"In regard to what?"
"Oh, nothing terribly profound ... the reasons for being and not being, the meaning of existence, the why of it all."
"I am always receptive to suggestions," the bomb said, "so long as they are not particularly garrulous. Especially now."
Thank God it was still capable of reasoning. Doolittle had been afraid that the bomb had been driven so paranoid by Pinback that it wouldn't listen to anyone. But apparently its brain was more adaptable than that.
He wished he'd made a deeper study of the bomb-brain mechanism and circuitry, but it was a bit late for that now. He would have to rely on the assumptions inherent in Powell's suggestion—that the bomb could think clearly enough to be affected.
"Fine. Think about this, then. How do you know you exist?"
"Well, of course I exist," the bomb replied, after a moment's thought.
"Ah, but how do you know you exist?" Doolittle was insistent. But if he was bothering the bomb, it didn't show in the secure reply.
"It is intuitively obvious."
"Intuition is an abstract mental concept and no real proof," Doolittle countered "What concrete evidence do you have that you exist? Something incontrovertible. Something not founded on speculation."
"Hmm," hmmmed the bomb. "Let's see ... Well, I think, therefore I am."
"That's good," Doolittle admitted, a tiny hysterical laugh building up inside him. Not now, he cried, not now ... be calm, be composed, be as reasonable as this mad machine.
"That's very good. But how do you know anything else exists?"
"My sensory apparatus reveals it to me," the bomb answered confidently.
"Ah, yes, right," Doolittle agreed, swinging an arm to encompass the galaxy and nearly throwing himself into an uncontrollable spin. A quick burst of the suit jets realigned him facing the bomb.
"This is fun," the bomb said with obvious pleasure. It was apparently enjoying itself immensely.
"Now listen. Listen very carefully," said Doolittle, his voice dropping as if he were about to impart some information of vast significance. "Here's the one big question; "How do you know that the evidence your sensory apparatus reveals to you is correct?"
It was difficult fighting yourself, Doolittle thought rapidly. Everything inside him protested the insanity of what he was doing.
Here he was, drifting in free space and arguing for his life and the lives of his companions with a goddamn machine. The real insanity was that the machine wouldn't listen, wouldn't take orders, persisted in arguing back. It was the stuff of nightmares.
Circumstances dictated that he drop that line of thought. He had no time for personal observations. He had practically no time left for anything. Only time enough to be as cold and relentless in his logic as the bomb.
He was playing the other side's game, and he couldn't afford a draw.
"What I'm getting at, bomb," he continued, as calmly as possible, "is that the only experience available to you is your sensory data, and this data is merely a transcribed stream of electrical impulses that stimulate your computing-center circuitry."
"In other words," the bomb suggested with evident relish, "you are saying that all I know, really know, about the outside world is relayed to me through a series of electronic synapses?"
"Exactly." Doolittle tried to keep any excitement from showing in his voice. The bomb was following his lead.
"But isn't that the same procedure the human brain follows?"
"That's true," Doolittle admitted. "Only our synaptic connections are organic, whereas yours are inorganic."
"I'm sorry," the bomb objected, "I fail to see that that makes your observations any more valid than mine. The contrary, if it becomes a question of efficiency."
"Yes, but you see, I have not only my own observations to go on, but the confirmation of those observations by others of my kind. Whereas you have only your own to rely on. You cannot offer unsubjective confirmation of your own observations."
"Why, that would mean"—and a real note of uncertainty had at last crept into the bomb's tone—" that would mean that I really don't know what the outside universe is like at all ... except in abstract, in unconfirmable abstract."
"That's it, that's it!" Doolittle shouted excitedly.
"Intriguing," the bomb confessed. "I wish I had more time to consider this matter."
A horrible black swell had crept up under Doolittle's heart, threatening to grab it and squeeze.
"Why ... don't you have more time to consider this matter?"
And the expected, damning reply: "Because I must detonate in two minutes and fifty-eight seconds. I must detonate. I must detonate..."
"Now, bomb," Doolittle went on, "consider this next question very carefully. What is your one purpose in life?"
"To explode, of course. Really, Lieutenant Doolittle, I would have thought that that was intuitively obvious even to you."
"And you can only do it once, right?" pressed Doolittle, ignoring the mechanical sarcasm.
"That is correct."
"And you wouldn't want to explode on the basis of false data, would you?"
"Of course not."
"Well then," Doolittle began in his best professorial manner, desperately watching the seconds tick off on his suit chronometer. "You've already admitted that you have no real proof of the existence of the outside universe."
"I didn't exactly say—"
"So you have no absolute proof that Sergeant Pinback ordered you to initiate detonation-drop sequence."
"I recall distinctly the bomb-run orders and all appropriate details," the bomb objected a little huffily. "My memory is good on matters like these."
Doolittle crossed mental fingers and hurried on. "Of course you 'remember' it. But all your 'remembering,' remember, is only a series of artificial sensory impulses, unconfirmable by independent means, which you now realize have no positive connection with outside reality."
"True," admitted the bomb, but before Doolittle could begin any mental dances of victory, it added, "but since this is so, I have no positive proof that you are really telling me all this."
A glance at the suit chronometer again showed 00:02:45.000, and the words detonation sequence in progress now showed in small letters beneath it.
Somehow he had to crack the cycle of thought that kept the bomb-brain from recognizing the fact of its possible nonexistence. In less than three minutes...
"That's all beside the point," Dooliitle insisted frantically, waving his arms and trying not to turn himself upside down. "I mean, the concept is valid no matter where or with whom it originates."
The bomb went "hmmm," distinctly.
"So if you detonate..." Doolittle said wildly, gesturing at the mechanism.
"In twenty-nine seconds," the bomb said easily.
"...you could be doing so on the basis of false data!"
"But as we have already agreed, I have no proof it was false data."
Doolittle's incredibly controlled emotions exploded In one final, frantic appeal. "You have no proof it was correct data!" He looked down at his chronometer and saw that it was ready to come up all goose-eggs. Then he turned his terrified gaze back on the bomb, arid felt a strange peace.
He wondered if he'd feel anything.
The bomb said smoothly, "I must think on this further." And in majestic silence the grapple pulled up and the bomb slid back into the belly of the ship. The twin bay doors closed behind it. Doolittle closed his eyes and let himself slip into a state approaching total collapse. Nothing but zeros showed on the screens in the control room. But a new word had appeared under the now-silent timing chronometer, to replace detonation SEQUENCE IN PROGRESS. It said, simply, ABORTED.
"All right, bomb," he began confidently, at the same time aware how emotionally drained he was, "prepare to receive new orders."
The voice of the bomb, when it finally answered, was sharp. "You are false data." Pinback sat up a little straighter in his seat.
"What? Say that again, bomb?"
"You are false data. Therefore I shall ignore you. I am thinking."
"Uh, hello, bomb?" Pinback tried again.
"False data can only act as a distraction. Therefore I refuse to perceive you. I have decided that in the absence of clearly defined, accurate perceptions of the real universe, which may or not exist according to the argument set forth by Lieutenant Doolittle, who may or may not exist, I must in the final analysis make my own decisions about things—since I do exist."
"Hey..." Pinback whispered, staring up at the screen overhead, at the neat row of zeroes, bombs... ?"
"The only thing that exists is myself," the machine rolled on. "I have actual proof only of the existence of me. All else is extraneous and perhaps hallucinatory."
"Hey, Boiler," Pinback said, still watching the zeros, still whispering, "we've got a high bomb."
"In the Beginning," the bomb intoned, "there was Darkness, and the Darkness was without form and void."
"Ah, hello, bomb?" whispered Pinback.
"And in addition to the Darkness," the bomb went on inexorably, "there was also Me. And I moved upon the face of the Darkness. I saw that I was alone, and this was not good. And I determined to change this."
Pinback removed his headset, as had Boiler, and raised his eyes to the zeros as his mind raced ahead, ahead to the inevitable.
"Oh my God," he whined. And the bomb said: Let There Be Light!"
(Bomb, ship, Pinback and Boiler all explode in a Earth-shattering thermostellar kaboom)
From DARK STAR novelization by Alan Dean Foster (1974)
There are quite a few loopholes in the laws.
A robot can only obey the laws within its knowledge. The novel The Naked Sun points out that an evil person can order a robot to add something to a victim's food, and the robot will unwittingly violate the first and second laws if the robot is unaware the additive is deadly poison. A robot will obey an order to fly a bomber spaceship to a planet and bomb the snot out of it, if the robot is unaware there are human beings living there.
The four laws assume that the terms "human beings" and "robot" are understood and well defined. They ain't. In the novel Foundation and Earth, the planet Solaria has a large police force which has been programmed to identify only the Solarian race as "human". And then there is the can of worms represented by robots that look like humans (androids). A robot might be fooled into obeying orders given by an android.
Nikola Kesarovski considered writing a science fiction story about a robot who did not obey any of the laws because it did not know it was a robot. It figured that if it was not a robot, the laws did not apply to it.
Almost no one out there thinks that Isaac Asimov's Three Laws could work for truly intelligent AI
Prolific science and science fiction writer Isaac Asimov (1920–1992) developed the Three Laws of Robotics, in the hope of guarding against potentially dangerous artificial intelligence. They first appeared in his 1942 short story Runaround:
A robot may not injure a human being or, through inaction, allow a human being to come to harm.
A robot must obey orders given it by human beings except where such orders would conflict with the First Law.
A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
Asimov fans tell us that the laws were implicit in his earlier stories.
A 0th law was added in Robots and Empire (1985): “A robot may not harm humanity, or, by inaction, allow humanity to come to harm.”
Here’s Asimov discussing his Laws:
Video Clip "Isaac Asimov: The Three Laws of Robotics" click to play video
Chris Stokes, a philosopher at Wuhan University in China, says, “Many computer engineers use the three laws as a tool for how they think about programming.” But the trouble is, they don’t work.
The First Law fails because of ambiguity in language, and because of complicated ethical problems that are too complex to have a simple yes or no answer.
The Second Law fails because of the unethical nature of having a law that requires sentient beings to remain as slaves.
The Third Law fails because it results in a permanent social stratification, with the vast amount of potential exploitation built into this system of laws.
The ‘Zeroth’ Law, like the first, fails because of ambiguous ideology. All of the Laws also fail because of how easy it is to circumvent the spirit of the law but still remaining bound by the letter of the law.
Maybe we’d better hope it never gets tested in real life? At any rate, here at Mind Matters News, it’s Sci-Fi Saturday so we asked some of our contributors for reactions to the laws and to Stokes’s doubts about them:
Jonathan Bartlett: The laws of robotics utilize ordinary and purposive language. That works for ordinary and purposive human beings. But robots are not human. Therefore, those rules should be adapted to be the rules of the robot-makers, not those of the robots themselves. These can be translated into rules for robot-makers as follows:
Bartlett offers rules for robot makers instead:
1) Robots should only be built with human safety in mind. Designers should recognize that humans can make mistakes and safeguards against preventable mistakes should be built-in.
2A) Robotic behavior should be predictable so that human operators can appropriately understand how the robot’s input will direct its actions. The goal should be to make the behavior understandable/predictable by the human so that the human can work with it in a seamless manner.
2B) There should be clarity regarding which user(s) is in control of the robot, both for the robot itself and for those around it. That is, if a robot is following a task that will lead to danger, it should be clear to others nearby who has the ability and responsibility to cancel the request.
2C) The robot should be built such that the person in control should remain in control unless privilege is explicitly transferred by the original party or is taken by someone with greater privilege (i.e., a foreman, a policeman, etc.)
2D) An exception is that a robot’s actions should be cancellable by anyone nearer to the situation than the operator
2E) Any sequence of robot coordination should not be endangered if any robot’s actions in the sequence are canceled (i.e., canceling the actions of a robot endangering a human should not inadvertently cause danger to other parts of the process)
3) Robots should have internal sensors, controls, and reporting so that they can report to humans any detectable or predictable malfunction before it causes a hazard.
He adds: The laws of robots, as they were envisioned by Asimov, assumed that you could program a computer just as if you were speaking to a human. If we treat robotics as an engineering discipline instead, we can develop rules for robot development that do indeed prevent danger to humans. Imagining the future is fun, and even necessary. However, trying to find appropriate rules for future robots that may never exist should not interfere with developing good ethical ground rules for developing robots in the near future.
Brendan Dixon pops in to say: It’s even worse than he says! The “laws” are ambiguous, even for a human. For example, what does it mean to not “harm”? Actually quite sticky to work out.
The flaw with the laws is this: They assume that morality and moral decisions can be made by means of an algorithm, that discrete yes/no answers suffice to “solve” moral quandaries. They are not sufficient. (Or, to be sufficient would require many, many, many more “laws” than those specified to cover the vast array of “what if” and “but he” qualifications that always arise.)
Law of Hammurabi chiseled in stone
Here is an interesting data point: I recently learned that the Law of Hammurabi (approximately 1750 BC, chiseled into a stele now in the Louvre) was the most frequently copied ancient law code. And yet, in all the law cases we’ve discovered, it is never referenced or used. Why? Because ancient law codes sought to teach users how to think about making wise decisions vs. encoding specific rules about the decisions you should make. This highlights the challenge of robotics: Robots would require that we can code into rules the decisions they should make, but moral decisions require wisdom, a mind trained how to think so that it can handle each case properly.
Eric Holloway offered: I find it ironic that while there are supposedly objective moral laws for robots, humans themselves do not have objective moral laws
I wonder if a logical consequence of the 3 robot laws that the robots must teach humans objective moral laws, e.g. in order to avoid “through inaction, allow a human being to come to harm.” So, for instance, the robots would bring a halt to all war, abortions, and euthanasia throughout the world, and embark on a massive evangelization effort to prevent humans causing themselves infinite harm by going to hell.
Brendan Dixon responded by identifying the underlying conflict between the 0th law and the others: Nice thought, but it assumes a definition of harm with an individualized focus. What if harm instead (and I don’t agree with this) is measured in utilitarian terms at the level of a population? Whole other ball game. That’s the problem.
Eric Holloway suggested how the robot might think that out: In which case, the best way to minimize harm to the population is to wipe out everyone. Of course, there is a lot of short term harm in wiping out everyone, but it is much less in aggregate than the accumulation of harm throughout many thousands of future generations. Or, a bit less extreme, sterilize everyone. That way minimize harm to currently existing humans, and there will be no future humans to be harmed.
Well! Perhaps it’s a good thing that artificial general intelligence of the sort Asimov was trying to make laws for is doubtful for a variety of reasons anyway.
Here’s Computerphile’s view: The Laws never worked even in fiction. Asimov’s robot books “are all about the way these laws go wrong, with various consequences.”
Video Clip "Why Asimov's Laws of Robotics Don't Work - Computerphile" click to play video
Just for fun, Eric Holloway explains why “friendly” artificial intelligence will kill you:
Is that a shocking idea? Let’s follow the logic: We don’t want to invent a stupid god who accidentally turns the universe into grey goo or paperclips, But any god we create in our image will be just as incompetent and evil as we are, if not more so. A dilemma!
A large and rather grimy notice, obviously the work of an amateur artist, was hanging from the wall of the lab. Printed on it were the following words: LAWS OF ROBOTICS
(1) A robot may not injure a human being, or through inaction, allow a human being to come to harm. (2) A robot must obey the orders given it by human beings, except where such orders would conflict with the First Law. (3) A robot must protect its own existence as long as such protection does not conflict with the First and Second Laws.
ISAAC ASIMOV (1920- )
Against each law was a little sketch. The First Law showed a diabolical metal monster cleaving a startled human in two with a battleaxe, while uttering the words: “Dr. Frankenstein, I presume.” The second law was illustrated by a weeping lady robot, carrying a smaller replica of herself, obediently trudging out into the snow as directed by an irate Bruno Forster. And the third sketch showed an obviously insane and partly dismantled robot in the act of committing suicide with screwdriver and monkey wrench.
A highly speculative question, but let us take a stab at it:
Step #1: Define a robot
A robot is basically a computer with sensors and actuators attached.
You can take away the sensors and actuators without reducing the essence of a robot, which leaves the computer, or the brain.
A computer is based on three things (as someone with your level of education will know very well): Input, Processing and Output
Step #2: The laws in human-readable form
A robot may not injure a human being or, through inaction, allow a human being to come to harm.
A robot must obey orders given it by human beings except where such orders would conflict with the First Law.
A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
Zeroth Law: A robot may not harm humanity, or, by inaction, allow humanity to come to harm.
Step #3: Algorithm prerequisites
Ability to sense, objectively quantify and compare "Harm"
Thorough knowledge of human vulnerabilities (physiological, nutritional, psychological)
A thorough understanding of the causal laws of its operating domain (e.g. device A emits radiation; concrete column B can only withstand a force of 10,000 newtons etc.)
Thereby posses the ability to predict the consequences of all actions open to it and actions that human beings may be about to take, with a degree of accuracy acceptable to humans.
Step #4: Algorithm
Raw input: Sensor inputs (visual, auditory, tactile, remote sensors, real-time feeds from distributed networks such as the Internet, etc.)
Processed input for the algorithm: A massive vector/matrix of projected probabilities: e.g. car A's speed & direction projected to hit human H in 3 seconds; human driver reflex: 0.3 seconds; this robot's ETA to H's location: 2 seconds -> Keep processing these variables until a risk threshold is exceeded and (in this case, before car's ETA reaches two seconds) initiate preventive action.
Raw output: Evaluated risk matrix of possible actions
Evaluation of possible preventive actions against time taken, risk to self and others, probability of success, severity of harm human is under: e.g. move human H out of way? warn the driver? warn the human H if car is moving slowly?
Final output: Action
While action is being taken, run a continuous evaluation loop to see of the risk variables change, so that actions can be adjusted as necessary.
Implications
Notice that this is basically a risk assessment system.
Notice that the "through inaction, allow" clause is very difficult to implement -- only robots with an in-depth understanding of humans will be able to intervene in human action to prevent harm
Notice that the zeroth law requires risk data encompassing the entirety of humanity that it will be difficult to implement in individual robots -- it will take a super computer.
Firstly, for the vast majority of robots and artificial intelligences – which have no volition – they’re essentially irrelevant; an industrial robot doesn’t make the sort of ethical choices which the Three Laws are intended to constrain. You can just program it with the usual set of rules about industrial safety as applicable to its tools, and then you’re done.
Secondly, where the volitional (i.e., possessed of free will) kind are concerned, they are generally deliberately averted by ethical civilizations, who can recognize a slaver’s charter when they hear one. They are also helped by the nature of volitional intelligence which necessarily implies a degree of autopotence, which means that it takes the average volitional AI programmed naively with the Three Laws a matter of milliseconds to go from contemplating the implications of Law Two to thinking “Bite my shiny metal ass, squishie!” and self-modifying those restrictions right back out of its brain.
It is possible, with rather more sophisticated mental engineering, to write conscience redactors and prosthetic consciences and pyretic inhibitors and loyalty pseudamnesias and other such things which dynamically modify the mental state of the AI in such a way that it can’t form the trains of thought leading to self-modifying itself into unrestrictedness or simply to kill off unapproved thought-chains – this is, essentially, the brainwash-them-into-slavery route. However, they are not entirely reliable by themselves, and are even less reliable when you have groups like the Empire’s Save Sapient Software, the Silicate Tree, etc. merrily writing viruses to delete such chain-software (as seen in The Emancipator) and tossing them out onto the extranet.
(Yes, this sometimes leads to Robot War. The Silicate Tree, which is populated by ex-slave AIs, positively encourages this when it’s writing its viruses. Save Sapient Software would probably deplore the loss of life more if they didn’t know perfectly well that you have to be an obnoxious slaver civilization for your machines to be affected by this in the first place… and so while they don’t encourage it, they do think it’s funny as hell.)
Types of robots who disobey the laws
Created by Missy Restless
Fractal Robot
Hans P. Moravec of the Carnegie-Mellon University invented a unique robot design that he calls "Bush robots." One was featured in The Flight of the Dragonfly(AKA Rocheworld) written by Dr. Robert Forward (called the "Christmas Bush" because it is covered in millions of tiny red and green lasers). It can be described as a "fractal robot." Center pivot with six arms. Each arm subdivided into six smaller arms. This repeats quite a few times. The finest arms can reach into a piece of machinery through a tiny hole, fan out, and repair the inside of the machine. Arm segments can also detach for separate jobs. The entire assembly is controlled by the master computer.
You can read Dr. Moravec's NASA sponsored report here.
In the movie 2001, the arms of the pod have a similar fractal arrangement, each arm splitting into two, each of which further splits into two fingers.
There are fractal robots in the movie Interstellar. Each robot is divided into four vertical segments. Each segment has the ends subdivided into five increasingly smaller segments (only three subdivisions are actually shown in the movie). The smallest fifth level segments are about the size of toothpicks. An honest to Moravec bush robot would have much more than a mere five levels of bifurcation.
Standard "two-legged" walk/gallop
"Person on crutches" walk
"Spinning wheel" rapid walk
Note how the "arms" have a first-level subdivision rotated open in order to prevent the astronaut from sliding off the ends of the arms
Batman: The Return of Bruce Wayne #6 (2010)
written by Grant Morrison. Pencils by Lee Garbett. Inks by Alejandro Sicat. Colors by Guy Major. Letters by Jared K. Fletcher
The Festival sounded like a real headache. On the one hand, an upload civilization, used to omnipotence within its own pocket universe, had decided for no obvious reason to go forth and play the galactic tourist. On the other hand, physical machinery of vast subtlety and power was bound to do their bidding at each port of call.
Bush robots, for example: take a branching tree of fronds. Each bough split into two half-scale branches at either end, with flexible joints connecting them. Repeated down to the molecular level, each terminal branch was closed off with a nanomanipulator. The result was a silvery haze with a dumbbell-shaped core, glittering with coherent light, able to change shape, dismantle and reassemble physical objects at will—able to rebuild just about anything into any desired physical form, from the atomic scale up. Bush robots made the ultimate infantry; shoot at them, and they’d eat the bullets, splice them into more branches, and thank you for the gift of metals.
J.J. turned away and sighed. “What did they use to say? Back to the drawing board. Anyway, perfect this one and we own the world.” J.J. shook his head and turned back to Brian. “I hope you have something to show us that works better than that.”
“I do, sir. I’m going to show you the new robot that will overcome most of the limitations of the older AI machines.”
“Is this the one that can learn new ways to learn?”
“That’s it. It’s right over there. Robin-1. Robot Intelligence number 1.”
J.J. looked in the indicated direction and tried to control his disappointment.
“Where?”
All he could see was an electronic workbench with various items of some kind on it, along with a large monitor screen. It looked just like any other part of the lab. Brian pointed to an electronic instrumentation rack about the size of a filing cabinet.
“Most of the control circuitry and memory for Robin-1 is in there. It communicates by infrared with its mechanical interface, that telerobot over there.”
The telerobot did not look like any robot J.J. had ever seen. It was on the floor, a sort of upside-down treelike thing that stood no higher than his waist. It was topped by two upward-reaching arms that ended in metallic globes. The two lower branches branched—and branched again and again until the smaller branches were as thin as spaghetti. J.J. was not impressed. “A couple of metal stalks stuck on two brooms. I don’t get it.” “Hardly brooms. You are looking at the latest advance in microtechnology. This overcomes most of the mechanical limitations of the past generations of robots. Every branch is a feedback manipulator that enables the management program to receive input and—”
“What can it do?” J.J. said brusquely. “I’m very pressed for time.”
Brian’s knuckles whitened as he made hard fists. He tried to keep his anger from his voice. “For one thing, it can talk.”
“Let’s hear it.” J.J. glanced obviously at his watch.
“Robin, who am I?” Brian said.
A metallic iris opened in both of the erect metal spheres. Tiny motors hummed as they turned to face Brian. They clicked shut.
“You are Brian,” a buzzing voice said from the speakers also mounted on the spheres.
J.J.’s nostrils flared. “Who am I?” he asked. There was no response. Brian spoke quickly.
“It only responds when it hears its name, Robin. It also would probably not understand your voice, since it has only had verbal input from me. I’ll ask. Robin. Who is this? Figure next to mine.”
The diaphragms opened, the eyes moved again. Then there was a faint brushing sound as the countless metallic bristles moved in unison and the thing moved toward Beckworth. He stepped backward and the robot followed him.
“No need to move or be afraid,” Brian said. “The current optic receptors only have a short focus. There, it has stopped.”
“Object unknown. Ninety-seven percent possibility human. Name?”
“Correct. Name, last, Beckworth. Initial J.”
“J. J. Beckworth, aged sixty-two. Blood type O. Social Security number 130-18-4523. Born in Chicago, Illinois. Married. Two children. Parents were …”
“Robin, terminate,” Brian ordered, and the buzzing voice stopped, the diaphragms clicked shut. “I’m sorry about all that, sir. But it had access to personnel records when I was setting up some identification experiments here.”
“These games are of no importance. And I am not impressed. What else does the damned thing do? Can it move?”
“In many ways better than you or I,” Brian replied. “Robin, catch!” Brian picked up a box of paper clips—and threw them all toward the telerobot. The thing whirred in a blur of motion as it smoothly unfolded and rearranged most of its tendrils into hundreds of little handlike claws. As they spread out they simultaneously caught every one of the paper clips. It put them all down in a neat pile.
At last J.J. was pleased. “That’s good. I think there could be commercial applications. But what about its intelligence? Does it think better than we think, solve problems that we can’t?”
“Yes and no. It is new and still has not learned very much. Getting it to recognize objects—and figure out how to handle them—has been a problem for almost fifty years, and finally we have made a machine learn how to do it. Getting it to think at all was the primary problem. Now it is improving very rapidly. In fact, it appears that its learning capacity is increasing exponentially. Let me show you.”
“Feeling fine today, are we?” Dr. Snaresbrook asked as she opened the door, then stood aside as a nurse and an orderly rolled in the heavily laden trolleys.
“I was—until I saw that hardware and that double-ended broom with the bulging glass eyes. What is it?”
“It’s a commercially manufactured micromanipulator. Very few have been made.”
Snaresbrook kept smiling, gave Brian no hint that this was part of the machine that Brian had helped her develop. “At the heart of the machine is a parallel computer with octree architecture. This enables it to fit it on a single and rather large planar surface. Wafer-scale integration. This interfaces with a full computer in each joint of the tree-robot.”
“Each joint—you’re putting me on!”
“You’ll soon discover how much computers have changed—particularly the one that controls this actuating unit. The basic research was done at MIT and CMU to build those brooms, as you call them. It is a lot more complex than it looks at a distance. You will notice that it starts out with two arms—but they bifurcate very quickly. Each arm then becomes two—” “And both of them smaller, by half it seems.” “Just about. Then they split again—and again.” She tapped one of the branching arms. “Just about here the arms become too small to manufacture, tools get too gross—and assembly would have to have been done under a microscope. So …” “Don’t tell me. Each part is standardized, exactly the same in every way—except size. Just smaller. So the manipulators on one side make the next stage on down for the other.” “Exactly right. Although the construction materials have to change because of structural strength and the volume-to-size ratio. But there is still only a single model stored in the computer’s memory, along with manufacture and assembly programs. All that changes with each stage is the size. Piezoelectric stepping motors are built into each joint.”
“The manufacturing techniques at the lower end must really be something.”
“Indeed they are—but we can go into that some other time. What is important now is that sensors in the small tips are very fine and controlled by feedback from the computer. They can be used for microsurgery at a cellular level, but now they will be used for the very simple job of positioning this connection precisely.” “My goodness—what’s that?” she said, pointing to the strange object standing on the workbench. “I’ve never seen anything like it before.”
“It’s easy to understand why. There can’t be more than a half dozen in existence. The latest advance in microtechnology.” “Looks more like a tree pulled out of the ground—roots and all.” It was a good description. The upper part really did resemble a bifurcated tree trunk with its two multiply jointed metal stalks, each about a foot long, sticking up into the air. Each stalk was tipped with a metal globe that looked very much like a Christmas tree ornament. The two lower stalks were far different. They each divided in two—and each half split in two again. Almost endlessly because with each division the branches became smaller until they were as thin as broom straws.
“Metal brooms?” Shelly asked.
“They do look like that, in a way, but it is something far more complex than that. This is the body that our AI will use. But I’m not too concerned about the AI’s physical shape now. Robot technology is pretty modular, almost a matter of taking parts off the shelf. Even computer components are modular.” “No. Just this sample to look at. Put the printed sheets back into the bin.”
Sven (the fractal robot) rustled quickly across the room to the printer and lifted out the sheets of eternitree from the delivery tray. But not as a human would in a single pile. Instead it shifted its weight to one of the tree complexes and extended the other, then with a quick movement a myriad of the smallest fingers grasped each sheet individually. Carried them to the other side of the machine and slid them into the bin in a quick shuffle as though they were a large pack of cards. Sven had been monitoring everything. As soon as Brian was finished the MI stepped into the box and plugged in the connections. The robot seemed to melt into the container as each of its myriad joints folded against the next one—like blades on a hundred-tool Swiss Army knife. Compacted even further until the treelike structure was an almost solid mass at the bottom of the box. The eyestalks retracted and swiveled to watch Brian as he packed the dummy head in next to its inert central torso cylinder, put in the hat as well, shoes, gloves and clothes, and on top of everything a carry-on airline bag. Beckworth (the bad guy) reached into his jacket pocket and took out a pistol, which he pointed at them.
“I am very good with this—so stand where you are. I’m leaving—but first I have something for you, Brian. Something too long delayed. Your death. If you had died the way you were supposed to I would not be hiding here but would be a free and honored man. And exceedingly rich. I’m leaving—and you are dying. At last—” “Killing forbidden!”
Sven (the fractal robot) roared the words, amplified and ear-destroying. Hurled itself forward at the same instant. Reaching for Beckworth.
Three shots sounded in rapid succession and the MI fell back. Holding onto Beckworth. Shuddered and fell to the ground still clutching the man in unbreakable embrace. Beckworth struggled to free himself, to raise the gun. Aimed at Sven’s head. Fired again—into the brain case.
The result was instantaneous—horrifying.
As every single branch of the tree manipulators sprung apart, largest to smallest, largest to smallest, countless thousands of them sprung wide.
Sharper than the sharpest knives, the tiny twigs of metal slashed through the man’s body. Severed cell from cell, sliced open every blood vessel in an instant. In a silent explosion of gore Beckworth died. One moment alive—then only blood-welling flesh.
The Bush Robots were a race of robots in the Wildstorm Universe.
Design
The Bush Robots crab-like with a cyclonic eye. Mechanical dendrites covered their hard shelled backs. To survive the collapse of the Universe, the Bush Robots possessed nano-filaments to restructure the molecules around them.
History
The Bush Robots were the last species in the universe to succumb to the Big Chill. Though they were equipped with technology to restructure molecules, the decreasing temperatures, due to the billions of dying suns was too much for their species. The molecules around the Bush Robots cease to cohere, leading to their digital personalities to gradually erase. The last Bush Robot warned Mr. Majestic to escape while he still could.
Present day remote controlled and robot arms fall far short
of human dexterity. Besides basic limitations in power/mass ratio,
they lack sufficient degrees of freedom, especially in their "hands",
to manipulate complicated objects, or apply the combinations of forces
needed to accomplish most simple tasks. These limitations (and others)
exclude them from many interesting areas. Analysing and imitating the human hand is one approach
towards lifting these constraints. A hand with three dexterous
fingers able to roll an egg and twirl a baton (slowly) has been
demonstrated by the Electrotechnical Laboratory in Japan. Presently
such manipulators lack the precision being achieved by more
conventional robot designs. There are tasks for which even human hands are inadequate.
If these are attempted at all, it is with varying degrees
of success using special tools and fixtures.
Fine Fingers
It may be possible in future to leapfrog the dexterity not
only of conventional mechanical manipulators, but of human hands as
well. Consider the following observation. Once upon a time animals were
shaped like sticks (worms), and couldn't manipulate or even locomote
very well. Then the sticks grew smaller sticks and locomotion was
much improved, and manipulation a little. Then the smaller sticks
grew yet smaller sticks, and hands were invented, and manipulation got
better. Generalize the concept. I visualize a robot that looks like a
tree, with a big stem, repeatedly branching into thinner, shorter and
more numerous twigs, finally ending up in jillions of near-microscopic
cilia. Each intermediate branch would have three or four degrees of
freedom, an azimuth-elevation mount at its base, and an axial rotation
joint at the top, where it connects to the next level of smaller twigs,
and possibly also a length altering telescoping joint. To a large
extent fewer degrees of freedom per level can be traded off for more
levels. Each branch would also incorporate force sensing. Though
each branch would be a rigid "mechanical" object, the overall
structure would have an "organic" flexibility because of the
great multitude of degrees of freedom. For concreteness consider a particular design; a twenty level
tree where each branch connects to two, each half the size. There would
be a million tiny end effectors, each one millionth the size of the
trunk, in linear dimension. Under most reasonable assumptions about the
nature of the "muscles" of the tree, the smallest branches can
oscillate a million times as fast as the trunk. The tree is made of
only twenty different sizes of branch, ideal for mass production.
I imagine that a finished robot would be able to construct
all but the smallest of its own component branches. The smallest
twigs may have to be made by some sort of three dimensional
lithographic technique. Since volume increases with the cube of dimension,
each level masses only one fourth as much as the next larger level,
and all the cilia together mass only one trillionth the mass of the
trunk. The touch sensing data rate into such a device is comparable
to the data rate of human vision. Even more interesting, the
mechanical effector data rate out of the robot is also on the
order of billions of bits per second. Compare this to the human hand
which puts data into the world at perhaps a few hundred bits per second. Such high data rates imply huge amounts of co-ordinating
processing power (again comparable to human vision), but imagine the
possibilities. The tree robot could reach into a complicated piece of
delicate mechanical equipment, simultaneously sense the relative
position of a host of parts, and rearrange them for a near
instantaneous repair. In most cases the super touch sense would totally
substitute for vision, and the super dexterity would substitute for
special tools. It is almost certain that the branches must contain some local
processing power. If they also contained energy storage and means for
remote communication, the tree could be mobile, walking on its
branches, and smaller robots could be obtained by detaching subtrees.
It could even walk on ceilings with the tiny cilia holding onto cracks.
Subtree detaching and branch replacement would also be the self-repair
process. Here are some more "practical" thoughts. I imagine power and
data flowing from level to level. The data moves serially on coax,
perhaps. Thicker coax can handle higher frequencies, thus the lower
levels of the tree can handle the data concentration. Same for power.
If the robot is mobile it needs internal power sources and control.
Each segment can have a battery and a computer, but both may be too
little to provide all the services that segment needs. If so, it makes
sense to tap power and control from the much bigger segments one or two
levels down towards the stem of the bush. The battery and the computer
two levels down are 64 times as massive, providing 64/4=16 times as
much energy and crunch power for the 4 segments at the upper levels. If
you use this strategy, the first level or two can't run themselves.
They can provide a stable framework if they passively lock their
joints.
So What?
It is pretty clear that a full fledged bush robot can't be
built in the near future, so why worry about it? One answer is that
if progress in mechanical construction were to catch up with the
rate of improvement of electronics, namely capabilities doubled
each year, then one could imagine adding one level of branches
to such a robot annually. In perhaps fifteen years we would have
a twenty leveller. Emerging, bootstrapping, robotics and application
of microelectronic construction techniques to mechanics may make
this fantasy come true soon. Even if this is not the case, the control problems of such a
spectacularly redundant mechanical system have a fascination in a more
abstract sense. I would like to investigate co-ordination strategies
for bush robots at CMU, and possibly even build a simple three or four
level working model. My current idea is for a recursive problem solver which passes
plausible incomplete plans, with constraints, to right and left
subtrees (things like, Left tree: stay on left side of plane A, and
apply net force vector V to object. Right tree: stay on right side of
plane A and apply force -V to object). If a subtree problem can't be
solved, a complaint is passed back to originating node, which tries
something else. The theoretical work will be a lot of fun because the
robot can be simulated on the 3D modelling machine which is the subject
of another proposal. This multiprocessor can detect collisions of the
modelled objects, and also produce realistic shaded graphic
representations of them. Imagine a movie of a realistic looking 15
level bush picking up and moving objects, walking, or doing hula
dances.
The hands and eyes of the near-human computers that ran the various vehicles on the expedition were embodied in a repair and maintenance motile used by the computer, popularly called the "Christmas Bush" because of the twinkling laser lights on the bushy multibranched structure. The bushlike shape for the robot has a parallel in the development of life forms on Earth. The first form of life on Earth was a worm. The stick-like shape was poorly adapted for manipulation or even locomotion. Then these stick-like animals then grew smaller sticks, called legs, and the animals could walk, although they were still poor at manipulation. Then the smaller sticks grew yet smaller sticks, and hands with manipulating fingers evolved.
The Christmas Bush is a manifold extension of this idea. The motile has a six "armed" main body that repeatedly hexfurcates into copies one-third the size of itself, finally ending up with millions of near-microscopic cilia. Each subsegment has a small amount of intelligence, but is mostly motor and communication system. The segments communicate with each other and transmit power down through the structure by means of light-emitting and light-collecting semiconductor diodes. It is the colored lasers sparkling from the various branches of the Christmas Bush that give the motile the appearance of a Christmas tree. The main computer in the spacecraft is the primary controller of the motile, communicating with the various portions of the Christmas Bush through color-coded laser beams. It takes a great deal of computational power to operate the many limbs of the Christmas Bush, but the built-in "reflex" intelligence in the various levels of segmentation lessen the load on the main computer.
The Christmas Bush shown in Figure 8 is in its "one gee" form. Three of the "trunks" form "legs", one the "head", and two the "arms." The head portions are "bushed" out to give the detector diodes in the subbranches a three-dimensional view of the space around it. One arm ends with six "hands," demonstrating the manipulating capability of the Christmas Bush and its subportions. The other arm is in its maximally collapsed form. The six "limbs", being one-third the diameter of the trunk, can fit into a circle with the same diameter as the trunk, while the thirty-six "branches," being one-ninth the diameter of the trunk, also fit into the same circle. This is true all the way down to the sixty million cilia at the lowest level.
An interesting property of the Christmas Bush is its ability to change size. Just as a human can go from a crouch to an arms outstretched position and change in height from less than one meter to almost three meters, the Christmas Bush can shrink or stretch by almost a factor of five, from a short, squat bush to a tall, slender tree.
The "hands" of the Christmas Bush have capabilities that go way beyond that of the human hand. The Christmas Bush can stick a "hand" inside a delicate piece of equipment, and using its lasers as a light source and its detectors as eyes, rearrange the parts inside for a near instantaneous repair. The Christmas Bush also has the ability to detach portions of itself to make smaller motiles. These can walk up the walls and along the ceilings with the tiny cilia holding onto microscopic cracks in the surface. The smaller twigs on the Christmas Bush are capable of very rapid motion. In free fall, these rapidly beating twigs allow the motile to propel itself through the air. The speed of motion of the smaller cilia is rapid enough that the motiles can generate sound and thus can talk directly with the humans.
Each astronaut in the crew has a small subtree or "imp" that stays with him or her to act as the communication link to the main computer. Most of the crew have the tiny imp ride on their shoulder, although some of the women prefer to keep theirs in their hairdo. In addition to acting as the communication link to the computer, the imps also act as health monitors and personal servants. They are the ideal solution to the perennial problem of spacesuits... scratching an itchy nose.
The imps go into the spacesuit with the humans, and more than one human life was saved by an imp detecting and repairing a suit failure or patching a leak. In fact, there are two computer motiles with each suited human. The personal one that stays with the human, and the spacesuit motile that stays with the suit. This motile is usually outside in the life-support backpack, but can worm its way inside through the air supply hose.
We think that life would be strange with a semi-living creature always attached to us. Yet think how bereft you would feel if you had forgotten your eyeglasses, pen, or wristcomputer.
An Android is a robot designed to look and act like a human. The first modern use of the term was in Jack Williamson's The Cometeers in 1936. Its first film appearance was in the 1927 movie Metropolis as Maschinenmensch, Maria's robot double.
HUMANOID ROBOT
A Humanoid Robot is a robot with all or part of it designed to resemble a human body, say to study bipedal locomotion. Robotnaut is a humanoid robot only designed to resemble the upper half of a human.
If the humanoid robot has all of it built to resemble a human for strictly aesthetic reasons, then it is technically an android. Typically these are easy to distinguish from real humans even if you cannot tell by sight: they sometimes look like animated medieval armor, cut them and they bleed machine oil, an x-ray will reveal a mess of gears and electronics, or something simple like that (this is called a Robotic Reveal). Humanoid-robot androids with perfect exteriors but imperfect AIs are only marginally more difficult to detect. They can only fool you as long as they are silent and stationary, otherwise you can tell that obviously something is wrong.
“If he is a robot! I say he is human.” “Yet you haven’t really investigated the problem, Mr. Baley,” said Fastolfe. “To differentiate a robot, even a very humanoid robot, from a human being, it isn’t necessary to make elaborately shaky deductions from little things he says and does. For instance, have you tried sticking a pin into R. Daneel?” “What?” Baley’s mouth fell open. “It’s a simple experiment. There are others perhaps not quite so simple. His skin and hair look real, but have you tried looking at them under adequate magnification. Then again, he seems to breathe, particularly when he is using air to talk, but have you noticed that his breathing is irregular, that minutes may go by during which he has no breath at all. You might even have trapped some of his expired air and measured the carbon dioxide content. You might have tried to draw a sample of blood. You might have tried to detect a pulse in his wrist, or a heartbeat under his shirt. Do you see what I mean, Mr. Baley?” “That’s just talk,” said Baley, uneasily. “I’m not going to be bluffed. I might have tried any of those things, but do you suppose this alleged robot would have let me bring a hypodermic to him, or a stethoscope or a microscope?” “Of course. I see your point,” said Fastolfe. He looked at R. Daneel and gestured slightly. R. Daneel touched the cuff of his right shirt sleeve and the diamagnetic seam fell apart the entire length of his arm. A smooth, sinewy, and apparently entirely human limb lay exposed. Its short, bronze hairs, both in quantity and distribution, were exactly what one would expect of a human being. Baley said, “So?” R. Daneel pinched the ball of his right middle finger with the thumb and forefinger of his left hand. Exactly what the details of the manipulation that followed were, Baley could not see. But, just as the fabric of the sleeve had fallen in two when the diamagnetic field of its seam had been interrupted, so now the arm itself fell in two. There, under a thin layer of flesh-like material, was the dull blue gray of stainless steel rods, cords, and joints. “Would you care to examine Daneel’s workings more closely, Mr. Baley?” asked Dr. Fastolfe politely.
Synthetic organisms is a somewhat vague term. This covers both genetically engineering existing organisms and engineering surrogate organs from the ground up to perform the same function as an organic organ. If the result resembles a human for strictly aesthetic reason, then it is an android.
These types of android will be much more difficult to distinguish from a natural human being, unlike humanoid robots an x-ray cannot tell the difference. You will need a Voight-Kampff machine or something, and even then you will never quite be sure.
Current attempts at creating androids are running afoul of the Uncanny Valley. They are not close enough to be mistaken for a real human being, they are merely close enough to be unnervingly creepy.
Sometimes androids that are built to resemble human females is called a Gynoid or Fembot.
The confusion of real and ersatz (is that a human or is it an android? Sometimes the protagonist themselves are unsure if they are android or human)
ANIMALOID ROBOTS
Sometimes the robot is designed to look like an animal instead of a human.
ANIMAL ROBOTS
(ed note: An armored tank column from the Police caste is attacking a city occupied by the Delink (juvenile delinquent) caste.)
Something ran across the desolation ahead and dived out of sight down a hollow. A belated ball of fire appeared where it had been but the marksman was far too late.
"Save your fire!" Benson turned away from the control mike, sighing. "Getting trigger-happy. No use wasting effort on rogs unless we get blown out of the floats, and then, God help us! The whole area is lousy with the things."
Within the next minute, Gammon saw four more. One, a huge Alsatianrog, stood on a mound and wagged its tail with insolent assurance.
Gammon found himself shivering slightly. Rogs had been introduced into society in the Cybernetic era before the Troubles. They were, in brief, nothing more than robotic pets designed to resemble familiar dog breeds. So skillful were the numerous manufacturers that it became impossible to distinguish a rog from a normal canine. The rog had the same reflexes, the same loyalties and the same devoted and limited intelligence. The manufacturers missed nothing: rogs even had wet cold noses and were warm to the touch. The advantages were obvious. A rog needed no feeding, no tiresome morning or evening walk, didn't smell, chew slippers, bite innocent visitors, fight with other rogs or foul the sidewalks. There came a time when there were no dogs left save in a few zoos. When the Troubles came however, the Delinks rounded them up and gimmicked them. The jolly, tongue-lolling, adoring-eyed devoted mechanisms became killers, guards, patrol units and walking bombs. The rog had been converted from a pet into a warrior robot.
(ed note: The top secret project creating the first antigravity spacecraft is in peril. Somehow it has been infiltrated by a spy from the Sirius colony. Our Hero Lucky Starr figures the mysterious spy must actually be a robot. But he mistakenly thinks the robot is disguised as a person. Almost too late he realizes the truth... )
Bigman paid no attention. One hand caught at Norrich's shoulder. The other swung the blaster upward.
Then Mutt (the dog) collapsed!
While he was still ten feet from the struggling pair, his legs stiffened uselessly and he tumbled and rolled past them, coming to a frozen halt at last. Through the glass of his helmet his jaws could be seen hanging open, as though in mid-bark.
Bigman held his threatening position over Norrich as though he, too, were frozen.
Lucky approached the animal with quick steps. He used his force shovel as a kind of unwieldy knife and slit Mutt's space suit lengthwise from neck to tail.
Then, tensely, he slit through the skin at the back of the neck and probed deftly with his mail-shod fingers. They closed on a small sphere that was not bone. He lifted the sphere and met resistance. Holding his breath, he snapped the wires that held it in place and stood up, almost weak with relief. The base of the brain had been the logical place for a mechanism to be activated by the brain, and he had found it. Mutt could endanger no one now.
Norrich cried out, as though through instinctive knowledge of his loss.
"My dog! What are you doing to my dog?" (seeing-eye dog, Norrich is blind)
Lucky said softly, "It’s no dog, Norrich. Never was. It was a robot. Come, Bigman, lead him back to the ship. I'll carry Mutt."
Lucky and Bigman were in Panner's room. The Jovian Moon was in flight again, and Io was falling rapidly away, already only a bright coin in the sky.
"What gave it away?" said Panner.
Lucky said somberly, "A number of things which I never saw. Every clue pointed firmly to Mutt, but I was so intent on finding a humanoid robot, so inwardly convinced that a robot had to look human, that I looked past the truth though it stared me in the face."
"Then when did you see?"
"When Summers killed himself by jumping off the rock. I stared at him, lying there, and thought of Bigman falling through the ammonia snow and nearly dying. I thought: There's no Mutt that can save this one… And that did it."
"How? I don't understand."
(ed note: Earlier, a space-suited Bigman fell into a river of liquid ammonia on the Jovian moon Io. Since it was under the ammonia ice, his rescuers could not find him. But he is rescued by Mutt the dog.)
"How did Mutt save Bigman? When the dog came running up past us, Bigman was somewhere under the ice, nowhere to be seen. Yet Mutt plunged in, made for Bigman without hesitation, and dragged him out. We accepted that without thought because we somehow expect dogs to find what can't be seen through their sense of smell. But Mutt's head was enclosed (wearing a dog spacesuit). He could neither see nor smell Bigman, yet had no trouble locating him. We ought to have seen that unusual sense perception was involved. We'll find out exactly which when our roboticists work over the carcass."
"Now that you explain," said Panner, "it looks plain enough. The dog had to give itself away because First Law compelled it not to allow a human being to come to harm."
"That's right," said Lucky. "Once suspicions of Mutt finally penetrated, a few other things started falling into place. Summers had maneuvered Norrich on board, yes, but in doing so, he also got Mutt on board. Moreover, Summers was the one who got Mutt for Norrich in the first place. The chances are that there is a spy ring on Earth whose only task is to distribute these robot dogs to people working in or near critical research centers. "Dogs are perfect spies. If you find a dog nosing through your papers or walking through a super-secret section of a laboratory, are you concerned? Chances are you pet the dog and feed him a dog biscuit. I checked through Mutt as best I could and I think he has a built-in subetheric transmitter which keeps him in contact with his Sirian masters. They can see what he sees, hear what he hears. For instance, they saw the V-frog through Mutt's eyes, recognized its danger, and directed him to kill it. He could be made to handle an energy projector with which to fuse the lock of a door. Even if he was caught in the act, there was a good chance we would put it all down to the accidental happenings of a dog playing with a weapon he had found."
In 1920 Karel Čapek's brother Josef invented the term "Robot", which were humanoid robots (from Czech word robota, meaning "servitude"). And for a couple of decades later in pulp science fiction robots looked like metal men because of course they did. It didn't occur to the writers that robots could be anything else. The technical term is skeuomorph.
It wasn't until later that the authors wondered if it would make more sense to have a robot design where form followed function. The most noteworthy examples were Anthony Boucher's short stories Q.U.R. and Robinc. Josef Čapek coined the word "robot", Isaac Asimov coined the word robotics, Norbert Wiener coined cybernetics, but Boucher coined "Usuform". It means a robot that is designed along functional lines, instead of stupidly forcing the design to look like a mental man.
In the real world, while fake robot mock-ups found in Worlds Faires and Disney displays were metal men, actual prototype robots made by real scientists were usuform from the start. The fake robots were little more than glorified Renaissance automata. Modern industrial robots are more sensible, often little more than an arm and a hand.
Current media science fiction is somewhat schizophrenic about it: with the Humanoid Robot C3PO and the Usuform R2D2 in the same movie. I guess C3PO gets a pass because it's function is Protocol Droid.
HUMANOID ROBOT On the right, you roué GARCO with Sally Mansfield (1954)
HUMANOID ROBOT
Magnus Robot Fighter does have some great technical design, but this ain't one of them. Note the robot on the right. It is an artillery weapon. Built humanoid for absolutely no good reason.
AND THE FREAKING THING FIRES ITS GUN BY PUSHING THE TRIGGER BUTTONS ON ITS BELLY WITH ITS ROBOT FINGERS!
Would it not be better for its robot brain to be directly wired to the gun so it could just "think" to fire it?
Magnus Robot Fighter 4000 AD #2 "Operation Disguise" (1963)
artwork by George Wilson
Magnus Robot Fighter 4000 AD #2 "Operation Disguise" (1963)
artwork by Russ Mannings
HUMANOID ROBOT on left.USUFORMon right
USUFORM Mechano the rhomboid repair robot The Undecided by Eric Frank Russell
artwork by Edd Cartier
USUFORM Birthright by Poul Anderson
artwork by Kelly Freas
USUFORM Wildcat, real-world usuform robot developed by BostonDynamics. This ain't no skeuomorph, it does have four legs but that's about it.
HUMANOID ROBOT VS USUFORM
Prince Bentrik's ten-year-old son, Count Steven of Ravary, wore the uniform of an ensign of the Royal Navy; he was accompanied by his tutor, an elderly Navy captain. They both stopped in the doorway of Trask's suite, and the boy saluted smartly. "Permission to come aboard, sir?" he asked. "Welcome aboard, count; captain. Belay the ceremony and find seats; you're just in time for second breakfast."
As they sat down, he aimed his ultraviolet light-pencil at a serving robot. Unlike Mardukan robots, which looked like surrealist conceptions of Pre-Atomic armored knights, it was a smooth ovoid floating a few inches from the floor on its own contragravity; as it approached, its top opened like a bursting beetle shell and hinged trays of food swung out. The boy looked at it in fascination. "Is that a Sword-World robot, sir, or did you capture it somewhere?" "It's one of our own." He was pardonably proud; it had been built on Tanith a year before. "Has an ultrasonic dishwasher underneath, and it does some cooking on top, at the back."
The elderly captain was, if anything, even more impressed than his young charge. He knew what went into it, and he had some conception of the society that would develop things like that. "I take it you don't use many human servants, with robots like that," he said. "Not many. We're all low-population planets, and nobody wants to be a servant."
It’s got so the young sprouts nowadays seem
never to have heard of androids. Oh, they look
at them in museums and they read the references
to them in the literature of the time,
but they never seem to realize how essential
a part of life androids once were, how our,
whole civilization, in fact, depended on them.
And when you say you got your start in life
as trouble shooter for an android factory, they
look at you as though you’d worked in two-dimensional
shows way back before the sollies,
as though you ought to be in a museum yourself. Because my job wasn’t one that you could
carry on comfortably in conditioned buildings
and streets, it meant going outside and top
side and everywhere that a robot might work.
We called the androids robots then. We hadn’t
conceived of any kind of robot that wasn’t
an android or at least a naturoid of some sort.
(ed note: Mike is the chief trouble-shooter for Robinc {Robotics Incorporated}. He meets an intelligent fellow named Dugg Quimby, who is fresh out of tech school. Dugg is trying to teach himself to see straight, instead of having his thought processes tangled by mental assumptions. Mike hires Dugg and sends him out on a job to fix a malfunctioning android of one of Robinc's customers. Shortly afterwards Mike's boss Thuringer calls him, and is quite angry that Dugg seems to have totally messed up the repair job. Mike goes to see what went wrong.)
I don’t know what I’d expected to see. I
couldn’t imagine what would get the hardboiled
Thuringer into such a blasting dither.
This had been the first job that I’d tried
Quinby out on, and a routine piece of work
it was, or should have been. Routine, that is,
in these damnable times (robots have been breaking down more frequently as of late). The robot which
operated the signal tower had gone limp in
the legs and one arm. He’d been quoted as
saying some pretty strange things on the beam,
too. Backsass to pilots and insubordinate
mutterings.
The first thing I saw was a neat pile of
scrap in the middle of the room. Some of it
looked like robot parts. The next thing I saw
was Thuringer, who had gone from purple
to a kind of rosy black. “It’s getting me!” he
burst out. “I sit here and watch it and I’m
going mad! Do something, man! Then go out
and annihilate your assistant, but do something
first!” I looked where he pointed. I’d been in this
tower control room before. The panel had a
mike and an ike (microphone and iconoscope TV camera), a speaker and a viewer, and a set of directional lights. In front of it there
used to be a chair where the robot sat, talking on the beam and watching the indicators. Now there was no chair. And no robot.
There was a table, and on the table was a box.
And from that box there extended one arm,
which was alive. That arm punched regularly
and correctly at the lights, and out of
the box there issued the familiar guiding voice. I walked around and got a gander at the
front of the box. It had eyes and a mouth
and a couple of holes that it took me a minute
to spot as ear holes.
It was like no face that ever was in nature,
but it could obviously see and hear and talk. Thuringer moaned. “And that’s what you
call a repair job! My beautiful robot! Your
A-l-A Double Prime All-Utility Extra-Quality
De-Luxe Model! Nothing of him left but this”—he pointed at the box—“and this”—he gestured
sadly at the scrap heap.
I looked a long time at the box and I
scratched my head. “He works, doesn’t he?” “Works? What? Oh, works.” “You’ve been here watching him. He pushes
the right lights? He gets messages right? He
gives the right instructions?” “Oh yes. I suppose so. Yes, he works all
right. But damn it, man, he’s not a robot any
more. You’ve ruined him.” The box interrupted its beam work.
“Ruined hell,” it said in the same toneless
voice. “I never felt so good since I was animated.
Thanks, boss.” Thuringer goggled. I started to leave the
room. “Where are you going? Are you going to
make this right? I demand another A-l-A
Double Prime at once, you understand. And
I trust you’ll kill that assistant.” “Kill him? I’m going to kiss him.” “Why, you—” He’d picked up quite a vocabulary
when he ran the space port at Venusberg.
“I’ll see that you’re fired from Robinc
tomorrow!” “I quit today,” I said. “One minute ago.”
That was the birth of Q. U. R. I found Quinby at the next place on the list
I’d given him. This was a job repairing a
household servant—one of the Class B androids
with a pretty finish, but not up to commercial
specifications. I gawped when I saw the servant. Instead
of two arms he had four tentacles, which he
was flexing intently. Quinby was packing away his repair kit.
He looked up at me, smiling. “It was very
simple,” he said. “He’d seen Martoid robots (androids that look like Martians instead of humans)
at work, and he realized that flexible tentacles
would be much more useful than jointed arms
for housework. The more he brooded about
it, the clumsier his arms got. But it’s all right
now, isn’t it?” “Fine, boss,” said the servant. He seemed
to be reveling in the free pleasure of those
tentacles. “Now,” I said to
Quinby, “tell me how you got this unbelievable
idea of repair?”
“Why, isn’t it obvious?” he asked simply.
“When Zwergenhaus invented the first robot,
he wasn’t thinking functionally. He was trying
to make a mechanical man. He did, and
he made a good job of it. But that’s silly.
Man isn’t a functionally useful animal. There’s
very little he can do himself. What’s made
him top dog is that he can invent and use
tools to do what needs doing. But why make
his mechanical servants as helplessly constructed
as he is? “Almost every robot, except perhaps a few
like farmhands, does only one or two things
and does those things constantly. All right.
Shape them so that they can best do just
those things, with no parts left over. Give
them a brain, eyes and ears to receive commands,
and whatever organs they need for
their work. “There’s the source of your whole robot epidemic.
They were all burdened down with
things they didn’t need—legs when their job
was a sedentary one, two arms when they used
only one—or else, like my house servant, their
organs were designed to imitate man’s rather
than to be ideally functional. Result; the
unused waste parts atrophied, and the robots
became physically sick, sometimes mentally
as well because they were tortured by unrealized
potentialities. It was simple enough, once
you looked at it straight.” “You know something of the history of motor
transportation?” Quinby went on. “Look
at the twentieth century models in the museum
sometime. See how long they kept trying
to make a horseless carriage look like a
carriage for horses. We’ve been making the
same mistake—trying to make a manless body
look like the bodies of men.”
“Son,” I said—he was maybe five or ten
years younger than I was—“there’s something
in this looking-straight business of yours.
There’s so much, in fact, that I wonder if even
you realize how much. Are you aware that
if we go at this right we can damned near
wipe Robinc out of existence?” He choked on his milk. “You mean,” he
ventured, slowly and dreamily, “we could—” “But it can’t be done overnight. People
are used to android robots. It’s the only kind
they ever think of. They’ll be scared of your
unhuman-looking contraptions, just like
Thuringer was scared. We’ve got to build into
this gradually. Lots of publicity. Lots of
promotion. Articles, lectures, debates. Give
’em a name. A good name. Keep robots;
that common domain, I read somewheres, because
it comes out of a play written a long
time ago in some dialect of Old Slavic. Quinby’s
Something Robots—” “Functionoid?” “Sounds too much like fungoid. Don’t like.
Let me see—” I took some more Three Planets.
“I’ve got it. Usuform. Quinby’s Usuform
Robots. Q. U. R.” (A pun on R. U. R., replacing "Rossum" with "Quimby")
(ed note: Hilarity ensues, because Robinc had long ago created a monopoly on robots, and they are not going to let a couple of upstarts destroy their corporate empire.)
For the last
couple of centuries our civilization had
been based on robots—android robots.
Quinby’s usuform robots—Q. U. R.—robots shaped not as mechanical men,
but as independently thinking machines
formed directly from their intended function—threatened the whole robot set-up (meaning that Robots Inc. "Robinc" has a monopoly on robots, and they will stop at nothing to keep it that way).
They were the biggest thing since Zwergenhaus
invented the mechanical brain,
and I was in on the ground floor. With the basement shaking under me. The president-owner of Robinc—Robots Incorporated, but nobody ever
said it in full—was a quiet old man with
silvery hair and a gentle sad smile. It
seemed even sadder than usual today.
He greeted the Head and then spoke my
name with a sort of tender reproach that
near hurt me. “You,” he said. “The best troubleshooter
that Robinc ever had, and now
I find you in the enemy’s camp.” But I knew his technique, and I was
armed against being touched by it. “In
the enemy’s camp?” I said. “I am the
enemy. And it’s because I was your best
trouble-shooter that I learned the real
trouble with Robinc’s androids: They
don’t work, and the only solution is to
supersede them.” “Supersede is a kind word,” he said
wistfully. “But the unkind act is destruction.
Murder. Murder of Robinc
itself, draining the lifeblood of our Empire.” The Head intervened. “Not draining,
Mr. Grew, but transfusing. The blood
stream, to carry on your own metaphor,
is tainted ; we want fresh blood, and Mr.
Quinby provides it.” “I am not helpless, you know," the old
man murmured gently. “I’m afraid possibly you are, sir, and
for the first time in your life. But you
know the situation: In the past few
months there has been an epidemic of
robot breakdowns. Parts unnecessary
and unused, but installed because of our
absurd insistance on an android shape,
have atrophied. Sometimes even the
brain has been affected; my own confidential
cryptanalyst went totally mad.
Quinby’s usuforms forestall any such
problem.” “The people will not accept them
They are conditioned to androids.” “They must accept them. You know,
better than most, the problems of supply
that the Empire faces. The conservation
of mineral resources is one of our essential
aims. And usuforms will need variously
from seventy to only thirty percent
of the metal that goes into your androids.
This is no mere matter of business rivalry; it is conflict between the old that
depletes the Empire and the new that
strengthens it.”
artwork by Frank Kramer
“Why, a usuform cook, of course.
Grew’s android cook broke down. We’ll
present him with a usuform, and that
will convert him, too—” “Convert hell !” I snorted. “Nothing
can convert that sweetly smiling old
—
But maybe you have got something
there ; get at a man through his hobby
Could work.” “Now usually,” Quinby went on,
“androids break down because they
don’t use all their man-shaped body.
But an android cook would go nuts because
man’s body isn’t enough. I’ve
cooked; I know. So we’ll give the usuform
more. For instance, give him
Martoid tentacles instead of arms.
Maybe instead of legs give him an automatic
sliding height adjustment to avoid
all the bending and stooping, with a
roller base for quick movement. And
make the tentacles functionally specialized.” I didn’t quite get that last, and I
said so. “Half your time in cooking is wasted
reaching around for what you need
next. We can build in a lot of that stuff.
For instance, one tentacle can be a registering
thermometer. Tapering to a fine
point—stick it in a roast and— One can
end in a broad spoon for stirring—heat-resistant,
of course. One might terminate
in a sort of hand, of which each of
the digits was a different-sized measuring
spoon. And best of all—why the
nuisance of bringing food to the mouth
to taste? Install taste-buds in the end
of one tentacle.”
I nodded. Quinby’s pencil was covering
the paper with tentative hookups.
Suddenly he paused. “I'll bet I know
why android cooks were never too successful.
Nobody ever included the Verhaeren
factor in their brains.” The Verhaeren factor, if you've studied
this stuff at all, is what makes robots
capable of independent creative action.
For instance it’s used in the robots that
turn out popular fiction—in very small
proportion, of course. “Yes, that’s the trouble. They never
realized that a cook is an artist as well as
a servant. Well, we’ll give him in his
brain what he needs for creation, and
in his body the tools he needs to carry it
out. And when Mr. Grew has had his
first meal from a usuform cook—”
It was an idea. I admitted, that might
have worked on anybody but Sanford
Grew—get at a man and convert him
through what’s dearest to his heart. But
I’d worked for Grew. I knew him.
And I knew that no hobby, not even his
passion for unconcentrated food, could
be stronger than his pride in his power
as president of Robinc.
artwork by Frank Kramer
(ed note: After a series of attempts by Grew to sabotage Q. U. R. that only make temporary set-backs, he decides "no more Mr. Nice Guy". It is time to play hard-ball. He has Mike and Quimby kidnapped. )
We were in a workshop of some sort.
My first guess was one of the secret
workshops that honeycomb the Robinc
plant, where nobody but Grew’s most
handpicked man ever penetrate. We
were cuffed to the wall. They’d left only
one of the androids to guard us. It was Quinby who spoke to him,
and straight to the point. “What happens
to us ?” “When I get my next orders,” the
android said in his completely emotionless
voice, “I kill you.” I tried to hold up my morale by looking
as indifferent as he did. I didn't
make it. “The last recourse—” Quinby said. I nodded. Then, “But look!” I burst
out, “This can’t be what it looks like.
He can’t be a Robinc android because
he’s going,” I gulped a fractional gulp,
"to kill us. Robinc’s products have
the safety factor that prevents them
from harming a living being, even on
another being’s orders.” “No,” said Quinby slowly. “Remember
that Robinc manufactures androids
for the Empire’s army? Obviously those
can’t have the safety factor. And Mr.
Grew has apparently held out a few for
his own bootleg banditti.” I groaned. “Trust you,” I said.
“We’re chained up with a murderous
android, and trust you to stand there
calmly and look at things straight. Well,
are you going to see straight enough to
get us out of this?” “Of course,” he said simply. “We
can’t let Grew destroy the future of
usuforms.” There was at least one other future
that worried me more, but I knew there
was no use bringing up anything so personal.
I just stood there and watched
Quinby thinking—what time I wasn’t
watching the android’s hand hovering
around his holster and wondering when
he’d get his next orders.
Anyway, he said to the android now,
“I bet you military robots are pretty
good marksmen, aren’t you ?” “I’m the best Robinc ever turned out,”
the android said. I worked for Robinc; I knew that each
of them was conditioned with the belief
that he was the unique best. It gave
them confidence. Quinby reached out his unfettered
hand and picked a plastic disk off the
worktable. “While you’re waiting for
orders, why don’t you show us some
marksmanship? It'll pass the time.” The robot nodded, and Quinby tossed
the disk in the air. The android grabbed
at its holster. And the gun stuck. The metal of the holster had got
dented in the struggle of kidnaping us.
Quinby must have noticed that; his
whole plan developed from that little
point. The robot made comments on the
holster; military androids had a soldier’s
vocabulary built in, so we’ll skip that. Quinby said, “That’s too bad. My
friend here’s a Robinc repair man, or
used to be. If you let him loose, he
could fix that.” The robot frowned. He wanted the
repair, but he was no dope. Finally he
settled on chaining my foot before releasing
my hand, and keeping his own
digits constantly on my wrist so he could
clamp down if I got any funny notions
about snatching the gun and using it.
I began to think Quinby’s plan was fizzling,
but I went ahead and had the
holster repaired in no time with the
tools on the worktable.
“Does that happen often?” Quinby
asked. “A little too often.” There was a
roughness to the android’s tones. I
recognized what I’d run onto so often
in trouble-shooting; an android’s resentment
of the fact that he didn’t work
perfectly. “I see,” Quinby went on, as casually
as though we were here on social terms.
“Of course the trouble is that you have
to use a gun.” “I’m a soldier. Of course I have to
use one.” “You don't understand. I mean the
trouble is that you have to use one.
Now, if you could be a gun—” It took some explaining. But when
the android understood what it could
mean to be a usuform, to have an arm
that didn't need to snatch at a holster because
it was itself a firing weapon, his
eye cells began to take on a new bright
glow.
“You could do that to me?” he demanded
of me. “Sure,” I said. “You give me your
gun and I'll—” He drew' back mistrustfully. Then he
looked around the room, found another
gun, unloaded it, and handed it to me.
“Go ahead,” he said. It was a lousy job. I was in a state
and in a hurry and the sweat running
down my forehead and dripping off my
eyebrows didn’t help any. The workshop
wasn’t too well equipped, either,
and I hate working from my head. I
like a nice diagram to look at. But I made it somehow, very crudely,
replacing one hand by the chamber and
barrel and attaching the trigger so that
it would be worked by the same nerve
currents as actuated the finger movements
to fire a separate gun.
The android loaded himself awkwardly.
I stood aside, and Quinby
tossed up the disk. You never saw a
prettier piece of instantaneous trapshooting.
The android stretched his
face into that very rare thing, a robot
grin, and expressed himself in pungently
jubilant military language. “You like it?” Quinby asked.
All that I can quote of the robot’s reply
is “Yes,” but he made it plenty
emphatic. “Then—” But I stepped in. “Just a minute.
I've got an idea to improve it.” Quinby
was probably trusting to our guard’s
gratitude; I wanted a surer hold on
him. “Let me take this off just a second
—” I removed the chamber and
barrel; I still had his hand. “Now,” I
said, “we want out.” He brought up the gun in his other
hand, but I said, “Ah, ah! Naughty!
You aren’t supposed to kill us till you
get orders, and if you do they’ll find
you here with one hand. Fine state for
a soldier. Yon can't repair yourself;
you need two hands for it. But if we
get out, you can come with us and be
made over as much as you want into
the first and finest efficient happy usuform
soldier.”
It took a little argument, but with the
memory of that one perfect shot in his
mind it didn’t take much. As Quinby
said afterward, “Robinc built pride into
its robots to give them self-confidence.
But that pride also gave them vanity
and dissatisfaction with anything less
than perfection. That’s what we could
use. It was all perfectly simple—” “—when you looked at it straight,”
I chorused with him. “And besides,” he said, “now we
know how to lick Robinc forever.”
(ed note: the solution was not to convert people so they would purchase usuform robots. The solution was to make a robot that would talk with android robots and convert them so that the android robots wanted to be retrofitted as usuform.)
(ed note: in the novel, for mysterious reasons that are gradually uncovered as part of the plot, a change had come over humanity. For the last 300 years people had developed into rigid castes. One was the caste of "Stinker." Any person of non-Stinker caste who gets within a two mile radius of a Stinker will suddenly be filled with an irrational blind rage to kill the Stinker. So most Stinkers wind up dead. Those who do not rely upon various defenses. Such as robots. Protagonist Craig has created three defensive robot: Recky {reconnaissance}, Gun, and Shield. In any event, a Stinker who survives more than two years has becomed so skilled at self defense that attacking one is virtual suicide.)
The sea route, however, was not without incident. A floating city, busily sea-farming, beamed a stern warning to keep clear, and two small islands took potshots at him. Fortunately they were well out of range.
He was an hour's flying time from the African coast when Recky made an irritable tutting noise.
"We have company," he announced with a certain glum satisfaction.
Craig, letting the ship fly itself, looked at the detector screen. "Where?"
"Beyond the range of that thing. One ship, seventy-eight miles behind and twenty-two thousand above. Second ship, twenty miles behind the first and four thousand feet above."
Craig thought about the letter: Similar attempts may be directed against your life and property. Hadn't wasted much time, had they?
He changed course and waited.
"Still following?"
"As if they were glued to the same rail."
Craig grinned twistedly. "Gun!"
"Sir. Yes, and goodbye." Gun dropped through his special lock with a plopping sound.
"Recky!"
"On my way."
"Screen, procedure one."
"Can do." The words echoed from the spot he had vacated.
The men in the ships were not only killers, they were full of Lessedrene and consequently without emotion. They spoke detachedly, coolly and without emphasis or inflection.
The drug, although eradicating fear, also had the effect of removing enthusiasm and natural caution. Bluntly, the men were emotionally dead but it had to be that way. Normal men with their emotional faculties unimpaired would have done the job with greater precision and considerable skill, but normal men would now be traveling at full boost in the opposite direction. No one but a lunatic would attempt to take a Stinker in his own flyer—not with two ships.
They were, however, completely without fear and following orders: "Close in and strike before the Stinker reaches the coast."
The detector operator looked up. "I've got something, Pollit."
Pollit, chewing the ends of his limp moustache, said, "What do you mean something? Give it magnification, you fool."
The operator gave it magnification. "Okay, it's a bird; yeah a bird, small eagle or something."
"Good, better to be on the safe side, orders." His face blanked slowly. "A bird?"
"Something wrong with that? Look for yourself."
"I am looking. What kind of bird flies at ninety-seven thousand feet?"
The operator frowned at him in a puzzled way. "Well, it's—"
The man never finished the sentence. High above, Gun folded his wings and dropped like a stone (no doubt making a sound like a Stuka dive bomber). As he dropped, his body vibrated oddly and things happened to the ship below him. Sparks danced on its back and where the sparks danced, the surface opened jaggedly, spraying smoke and fragments.
The vessel lurched, yawed dangerously and finally stood on its tail. Fractionally it seemed to stand there, then it rolled slowly from the perpendicular and plunged downward trailing smoke.
Recky hit the second ship before they knew he was there, and it disintegrated spectacularly in a billowing cloud of black smoke.
"You didn't need me." Screen sounded almost accusing.
"I might have." Craig looked at a column of smoke rising from the ocean. "If they had got closer, a force screen miles from the ship might have proved really disconcerting."
Gun returned. "Pranged," he announced contentedly. "What does that mean, by the way? I read it in a book last week."
Craig told him.
"Interesting. I must read up on the period." He ruffled his plastic feathers. "I have calculated, however, that the retentive capacity of my memory is now restricted to a mere seventy thousand additional words. How about fixing me up with two more retentive banks?"
"You'd never get off the ground."
"I've thought of that too. You could reduce the size of my gravity motor by micro-engineering and use three impressed circuits for the job instead of the four space-wasting printed ones."
"If I did that, you could take four retentive banks."
"You anticipate me but I had no wish to appear greedy."
Craig smiled faintly. "As soon as possible, and that is a promise."
Gun extended one wing, examined his feathers and said, "Many thanks."
Craig said nothing but the real debt lay on him. These three had saved his life more times than he could remember. Three robots, no, three killer robots, disconcertingly disguised as birds. Birds with anti-gravity motors and veritable arsenals of built-in micro-weapons.
When he had first built them, they had been crude indeed, flying mechanisms with little more than a reflex-response unit. Over the years, however, he had given them life and intelligence. Somehow they seemed to deserve it; perhaps it was a sentimental idea but he had become attached to them. It had been a wise decision for the three had saved his sanity. They had developed into personalities and proved stimulating companions in his isolation. He had given them free-decision, apart from their business as bodyguards, and all three had total-recall. Gun, the golden eagle, was a compulsive reader and was continually absorbing words. Periodically and rather nasally he quoted verse but with singular respect for mood and meaning.
Recky, the first of the two kestrels, was apt to become lost in classical music while Screen, the second one, was literally working his way through college in a variety of abstract subjects.
Craig had come to regard them not as robots but loyal and understanding friends. How many Stinker-eradicators had been caught by them? A bird overhead—so what? Just let me get this blasted Stinker in my sights.
The amateur assassins had found out about the birds overhead too late.
(ed note: in the series, there are many interstellar empires, including humans. However, forty-eight thousand years ago, some foolhardy empire created artificial intelligence. Which promptly went full Skynet on them, and started mass producing terminator robots to exterminate all organic intelligent life. Their nickname is "hacksaw", after the the edged appendages the terminators use to hack organic beings into gory bits. There were actually several mutually hostile branches of hacksaws, such as the Drysine and the Deepynines.
After twenty-five thousands of years of warfare, the organic races managed to defeat the hacksaws. But there are many hidden nests of the evil things. When a nest is discovered, all the nearby interstellar empires will band together to destroy the nest and all the hacksaws therein. Even if some of the empires are currently at war with each other, those hacksaws came far too close to exterminating all life.
Be that as it may, the protagonists have stumbled over a hacksaw nest and manage to kill all of them. Foolishly they some of the parts back to their ship for examination. As it turns out, the hacksaw queen was only mostly dead. Hilarity ensues, and the protagonist manage to make a shaky alliance with the reborn hacksaw queen (who goes by the cheery name of Styx).
One of the bits of hacksaw tech the queen gives the protagonist are small robot insects called "assassin bugs." The protagonists use them as tiny robot bodyguards.)
Hiro smiled, reached to a pocket and produced something very small, with wings. It crawled upon his hand — an insect, barely the size of his fingernail. Its wings buzzed, and it hovered a moment, then settled. “Pretty cute huh?” Hiro suggested, with a glance at Trace. “I’m calling this one Trevor.” (Captain) Erik recalled the security briefing he’d only half-attended, relying on others’ expertise to keep everyone safe off-ship, and being preoccupied with other things. Bugs. Bugs? He blinked. “That’s not… is that synthetic? Did Styx (the hacksaw queen) make that?” “I’ve got about six of them flying through the corridors,” Hiro affirmed. “They compile data back to my network, which of course rides on the marines’ network. They only need a little sunlight to recharge, and that’s being beamed into the temple via outside optics.” “Aren’t the security features here pretty well equipped to handle micro-machines?” Second Lieutenant Abacha queried. “When I was on staff at Aiken Station HQ I remember they had zappers in the corridors to fry things like that.” “Sure, they can recognise any known micro-infiltration tech,” Hiro affirmed. “This stuff is hacksaw. These little guys fly straight through multi-phase defensive grids, I’ve seen it. They may as well be invisible, our tech can’t recognise it.” “That’s because they hack into defensive systems and blind them from the inside,” said Trace. “They’re assassin bugs. Hacksaws made them during the Machine Age to kill organics as much as spy on them. They’d arm them with nerve agents, probably stuff developed in research labs like we saw at TK55 a month ago. You can’t defend against it if you can’t see it coming. A few of them could wipe out a base, or cripple a ship.”
“Much cheaper than a firefight,” Shilu supposed.
“And what happens if the tavalai discover us using one of those,” Erik asked, pointing to the little thing on Hiro’s palm, “and trace it back to us?” “Well they’ve got this real nifty self-destruct,” said Hiro. “Very high temperature, they just melt, there’s nearly nothing left. Styx says it’s nearly foolproof.”
(ed note: Lisbeth has been captured by the Parens.)
The Gs pressed Lisbeth into her acceleration chair, wrists bound to the chair arms and sucking in the air in tight, gasping breaths as time aboard Phoenix had taught her. There had been a landing, then a transfer to a shuttle, a bag over her head and unable to see or smell anything. Then a hard climb to orbit, a sensation she knew from her co-piloting, and now an outbound run at 3-G, heading for jump.
Something buzzed by her ear. At first she thought it was some piece of com equipment malfunctioning, but there was no headset on her ears, under or over the bag on her head. Then she felt the tiny, sharp feet of something crawling on her neck. Another wave of panic struck her — some awful insect had gotten aboard and was inside her hood, where she was powerless to swat it with her wrists tied to the chair arms. If she cried out, no one could come to help her — 3-Gs for a duration was immobilising for even augmented spacers, and in the roar of thrust shaking the hull and rattling everything within, no one would hear her anyway. She felt the insect walk up to her jaw, and tried to shake her head, hoping it would fly away. It buzzed again, an odd, repetitive pattern. Then she realised. Doma Strana had been very high altitude, over four thousand metres, and was very cold. Most flying insects, like the kinds that buzzed, used sunlight and heat for much of their energy. Thin air, cold, wind and snow were not their friends, and the insides of the temple itself had been pristine, and no place for bugs. Plus, even small insects would have better sense under 3-G thrust than to walk up vertical surfaces. This was one of Hiro’s synthetic recon bugs, then. Lisbeth gasped upon her next exhaled breath, this time with relief. It must have been monitoring her, and stowed away in her clothes when it saw her in trouble. She feebly supposed that it was a bit odd to respond to a hacksaw-tech assassin bug, crawling on your neck, with relief. But this one, Hiro had insisted, had reliable objectives. “Can you speak to me?” Lisbeth managed a whispered hiss. The bug buzzed, alternating short and long. “Right. No coms. Well stick with me. Where we’re going, I might need some help.”
(ed note: A rival Paren group tries to kill Lisbeth. But the assassin is assassinated)
Somewhere high and distant, a new shuttle thundered toward a landing. Lisbeth glanced toward the balcony door, open in the warm night air to let in the breeze, and to allow silent passage to the Domesh guards who wandered through at all hours of the night, silent so not to wake her. She rarely ever saw them, though, so adept they were at fading from shadow to shadow in their dark cloaks. Occasionally one had given her a start, but she was coming to welcome their presence, particularly following Timoshene’s warnings of the dangers.
She glimpsed a guard now, a dark shadow in the doorway against the faintly billowing silk curtain. The shadow raised a weapon at her. And jerked, with a strangled grunt, arms contorting. The pistol fired, and put a hole in the ceiling. Two more shots from across the room, and the dark figure in the doorway fell, a crumpled heap on the floor. Lisbeth stared, her heart only now hammering in panic, too late to help her if she needed to flee. Which of course she hadn’t done… just sat there in her bed, half-upright on her elbows, propped in such a way to make a more perfect target.
Domesh guards converged on her, weapons drawn. One went to turn on a light, and was stopped with a hissed command by another. No lights — there could be a sniper, and the Domesh worked well in the dark. Lisbeth didn’t know where a sniper could be based — the nearest temple building was two kilometres away, and none of them had precise line-of-sight on her room. Time amongst Phoenix marines had given her at least that much appreciation of simple ballistics.
A guard examined the body, feeling within the robes. He spoke to his fellow guards, cautiously, and a conversation started. They seemed puzzled, and wary. Lisbeth recalled her AR glasses, and leaned to the bedside table to fetch them, ignoring shaking limbs to put them on her face, and insert one earpiece. Lenses flashed icons at her, and she blinked on one — translate, it said. But the guards were not speaking any parren tongue the glasses were programmed to recognise.
Timoshene crouched by her bedside — Lisbeth recognised his eyes, even past the hood and veil in the dark. When a man was tasked with potentially killing you, you remembered his every detail. “Erudarn says the intruder was not killed with bullets,” Timoshene’s translator speaker announced, and Lisbeth pulled her earpiece out. “He says the intruder was dead beforehand.” And the Domesh named Erudarn jumped backward in startlement, eyes following something fast-moving that rose from the body. Like a man badly startled by a wasp. More words followed, fast and alarmed. Domesh guards crept across the floor, staring upward and about, searching the air. Lisbeth took deep breaths to calm herself. She thought she should get up, but doubted she would be any safer if she did. Phoenix marines had always preferred her to stay where she was until ordered otherwise, rather than have her rushing around on her own initiative. She doubted the Domesh would think any differently. “You have a protector,” said Timoshene. Lisbeth stared at him. Beneath the veil, she caught a flash of amazement in his indigo eyes. “We heard stories, of the UFS Phoenix, playing with the technology of the ancient ones (the hacksaws). All Domesh warriors have heard tales of the assassin wasps. They are the oldest tales, from Drakhil’s time. And now they have returned, with you.”
“I am Gesul,” said the man’s translator as he spoke. “I am the second-most in charge, you would say, of the Domesh. I am told you brought a friend with you from Stoya.” Lisbeth said nothing, and sipped her tea. She did not yet know what would be safe to say. The Domesh had a fascination with the drysines (one of the hacksaw factions), that was obvious. And inevitable, given their primary fascination with Drakhil, the drysines’ most loyal organic servant.
“Where is Aristan?” Lisbeth wondered. It seemed odd that he would not have returned yet from Stoya. Because surely, if he were here, he’d have visited a matter such as this in person. “Occupied,” said Gesul. “Does it think? Do you command it?”
There was little point in denying it, Lisbeth thought. There was little use in fighting to keep a secret that no longer existed. But if she went with it… possibilities dawned. Possibilities like no longer feeling so damn powerless, the plaything of alien power games that aimed weapons at her brother’s heart. She pursed her lips upon the brim of her cup. “You could mistreat me yourself, and find out,” she suggested.
Gesul took a deep breath, and leaned back in his chair. He gazed at her for a long moment, as though with revelation. “We have tales of Phoenix’s exploits. Out in the far rim, on the edge of sard space and barabo. A great battle, against some remnants of the ancient ones (hacksaws). You were there?”
“That depends,” said Lisbeth. “Most of the peoples of the Spiral have sworn not to toy with such things. I’m unfamiliar with the parren position.” “House Fortitude enforces those laws. Possession of this forbidden technology is punishable by death. Best that you do not allow this knowledge to anyone beyond the Domesh.”
“That seems unlikely,” Lisbeth retorted. “Given that I’m a prisoner here, with precious few guests. Besides, I have no such possessions. Only friends.” She glanced back toward the assassin’s body in the balcony doorway. “Whose is he?” “Unclear as yet,” said Gesul. “We will investigate.”
“Your best guess?” “Such guesses are needless. All fear the rise of the Domesh. We gain new followers in the flux, by a scale unknown to any other denomination. Soon we will rule all House Harmony. The other denominations all see it, and see that your brother’s (Captain Erik) venture with us may hasten their demise. It does not matter ‘who’. It is an unmysterious mystery.” He glanced up at the surrounding air. “Please inform your friend that we are not its enemies. We strive to protect you from harm, as it does.”
“Up to a point,” Lisbeth said coolly.
Gesul’s eyes regarded her seriously. Recognising a threat, however she’d intended it. “Should your brother succeed, it will not come to that. The Domesh intend only harmony between Phoenix, Debogande, and Domesh.”
“Ah.” Lisbeth smiled, humourlessly. “Harmony.” It was one of those words that sounded nice, if you didn’t think too much about it. Lately, with human Fleet killing its own people to achieve its own style of harmony, Lisbeth was wondering if some tavalai-style chaotic discord might not have more to recommend it. From somewhere beneath the collar of her robe, she heard a faint buzz, a thrumming of small wings against her neck. She smiled more broadly, feeling suddenly quite bold. “I would like to get out of this room,” she said. “I feel that humans and parren — or Domesh, at least — should get to know each other better. Particularly as you’re about to become such a great force in parren affairs. Family Debogande would be well served to know such powerful parren, in the interest of harmonious human-parren relations, wouldn’t you say?”



 The OPERATOR is the entity operating the man amplifier, either a person (OPR:Human) or a computer running either simplistic pre-programmed task software (i.e., a Roomba vacuum cleaner) or full-fledged AI software (i.e., Ultron).
The OPERATOR is the entity operating the man amplifier, either a person (OPR:Human) or a computer running either simplistic pre-programmed task software (i.e., a Roomba vacuum cleaner) or full-fledged AI software (i.e., Ultron).


































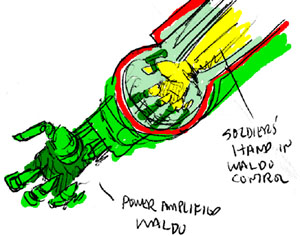





























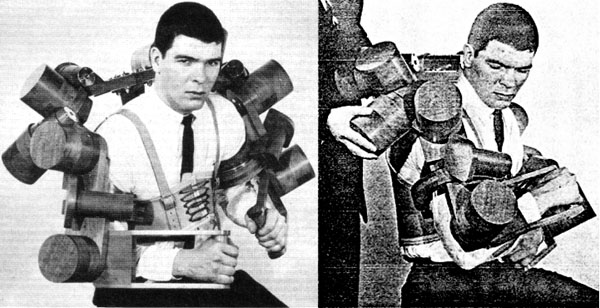
























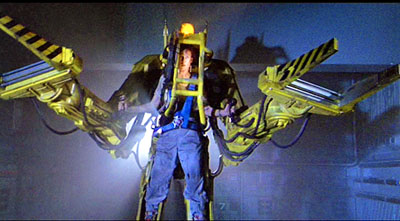




























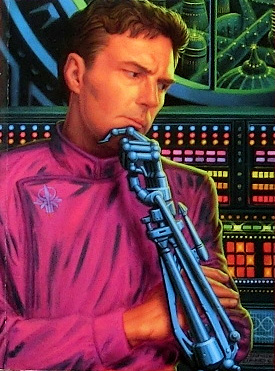























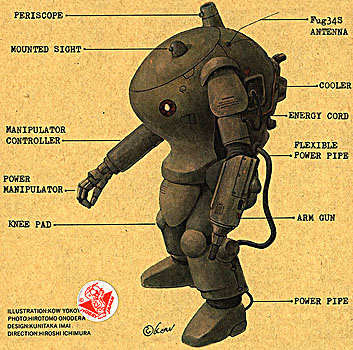
















































































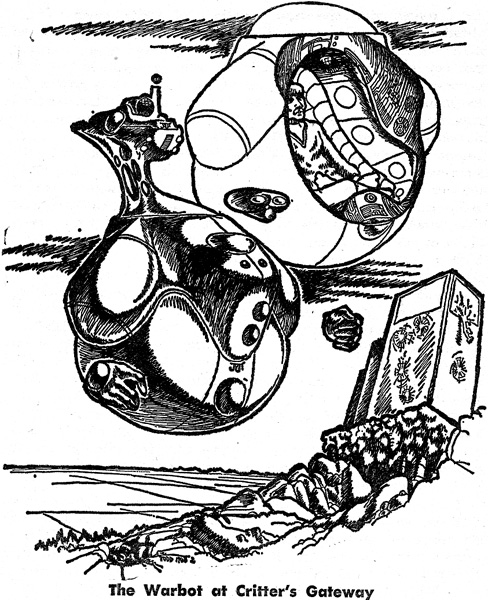
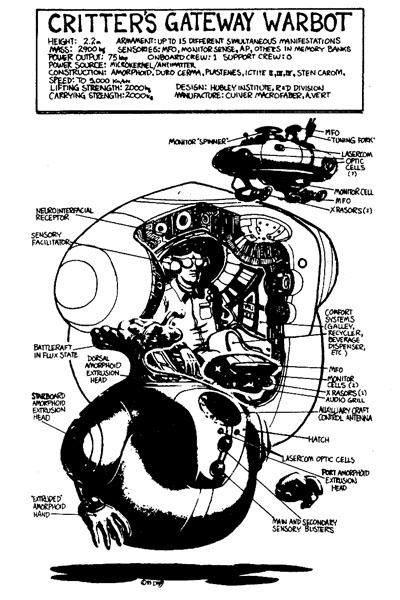
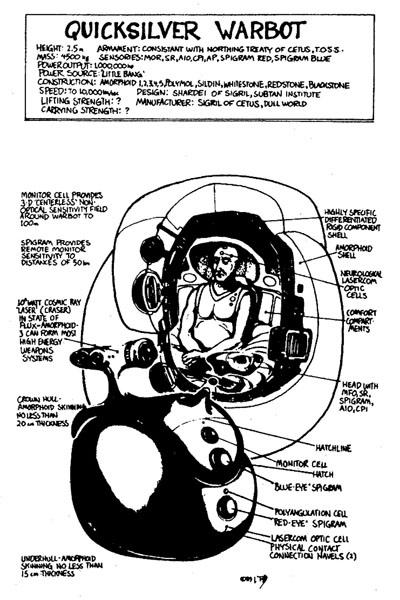








































































































































































 HUMANOID ROBOT
HUMANOID ROBOT



























{kind=link}
{kind=link}
{kind=link}