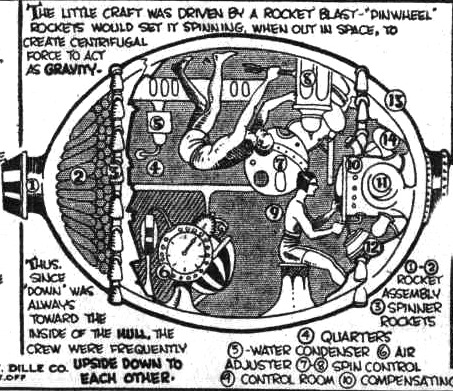
These boil down to: using acceleration by thrusting the ship, spinning the ship (or sections of the ship) to utilize "centrifugal force", or placing a large mass under the ship (generally by landing on a planet).
Centrifugal force is the method of choice for obvious reasons. Nothing short of a freaking torchship can do 1 g of acceleration for longer than a few minutes, and it is highly inconvenient to cart along a planet the size of Terra just so you can have some gravity.
Science fiction authors find all these choices to be confining, so they have invented all sorts of technobabble ways of generating gravity with the flip of a switch.
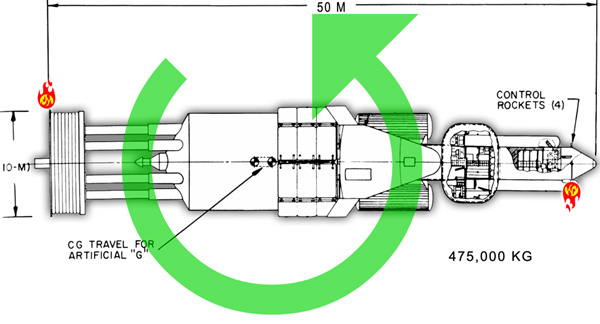
Centrifuge ship with spin Out Is Down Down is at 90° to spin axis, pointing away from spin axis. The spin axis coincides with thrust axis (straight up and down in the diagram).
With centrifugal gravity, the direction of "down" is in the opposite direction of the spin axis of the centrifuge (in a direction at 90° to the spin axis, pointing away from it). Unless you are doing something silly like using rocket acceleration at the same time with a centrifuge that is not gimbaled.
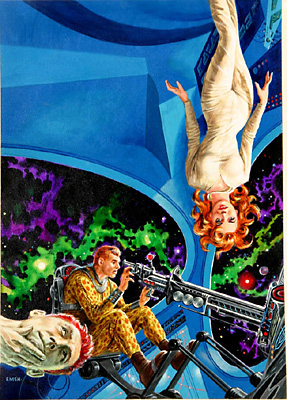
HUMAN TRADEMARK
Streaker had been built from a modified Snark hunterclass
exploration vessel. Few Snarks were still in service. As Terrans became more
comfortable with the refined technologies of the Library, they learned to
combine the old and new — ancient Galactic designs and indigenous
Terran technologies. This process had been in a particularly awkward phase when
the Snarks were built.
The ship was a bulb-ended cylinder with jutting, crane-like
reality flanges in five bands of five along her hull. In space the flanges
anchored her to a protecting sphere of stasis. Now they served as landing legs
as the wounded Streaker lay on her side in a muddy canyon, eighty meters below
the surface of an alien sea.
Between the third and fourth rings of flanges, the hull bulged
outward slightly for the dry-wheel. In free space the wheel rotated, providing
a primitive form of artificial gravity. Humans and their clients had learned
how to generate gravity fields, but almost every Earth ship still possessed a
centrifugal wheel. Some saw it as a trademark, advertising what some friendly
species had recommended Terrans keep quiet, that the three races of Sol were
different from any others in space … the "orphans" of Earth.
Streaker's wheel held room for up to forty humans, though right
now there were only seven and one chimpanzee. It also held recreation
facilities for the dolphin crew, pools for leaping and splashing and sexual
play during off-duty hours.
But on a planet's surface the wheel could not turn. Most of its
rooms were tilted and inaccessible. And the great central bay of the ship was
filled with water.
Dennie rode a lift up one of the spokes connecting the dry-wheel
to the ship's rigid spine. The spine supported Streaker's open interior. Dennie
stepped from the elevator into a hexagonal hallway with doors and access panels
at all angles, until she reached the main bay lock, fifty meters forward of the
wheel spokes.
In weightlessness she would have glided rather than walked down
the long passage. Gravity made the corridor eerily unfamiliar.
What have you found?
[Not much. All dead.] Every last one of them?
The woman’s thoughts arrived in his head like bullets, clipped and precise. [Recently. No sign of injury. Appears deliberate.] No sign of a single survivor? We thought there might be one, at least.
[No survivors, Clavain.] She offered him a feed into her memories. He accepted it, steeling himself for what he was about to see.
It was every bit bad as he had feared. It was like uncovering the scene of an atrocious mass suicide. There were no signs of struggle or coercion; no signs even of hesitation. The crew had died at their respective duty stations, as if someone had been delegated to tour the ship with suicide pills. An even more horrific possibility was that the crew had convened at some central location, been handed the means of euthanasia and had then returned to their assigned niches. Perhaps they had continued to perform their tasks until the shipmaster ordered the mass suicide.
In zero gravity, heads did not loll lifelessly. Even mouths did not drop open. Dead bodies continued to assume more or less lifelike postures, whether restrained by webbing or allowed to drift untethered from wall to wall. It was one of the earliest and most chilling lessons of space warfare: in space, the dead were often difficult to tell from the living.
The crew were all thin and starved-looking, as if they had been living on emergency rations for many months. Some of them had skin sores or the bruised evidence of earlier wounds that had not healed properly. Perhaps some had even died before now, and had been dumped from the ship so that the mass of their bodies could be traded against fuel savings. Beneath their caps and headsets none of them had more than a greyish fuzz of scalp stubble. They were clothed uniformly, carrying only insignia of technical specialisation rather than rank. Under the bleak emergency lights their skin hues merged into some grey-green average.
Through his own eyes now Clavain saw a corpse drift into view. The man appeared to paw himself through the air, his mouth barely open, his eyes fixed on an indeterminate spot several metres ahead of him. The man thudded into one wall, and Clavain felt the faint reverberation where he was hitched.
Clavain projected a request into the woman’s head. Secure that corpse, will you? Not for the first time, Clavain felt a dizzying sense of vertigo as the comet’s interior space came into view. The husk had not stayed hollow for long. Its cored-out volume was filled with moving machinery: a great nested clockwork of rushing circles, resembling nothing so much as a fantastically complex armillary sphere.
He was looking at the military stronghold of his people: the Mother Nest.
There were five layers to the Mother Nest. The outer four were all engineered to simulate gravity, in half-gee increments. Each layer consisted of three rings of nearly equal diameter, the plane of each ring tilted by sixty degrees from its neighbour. There were two nodes where the three rings passed close to each other, and at each of these nodes the rings vanished into a hexagonal structure. The nodal structures functioned both as an interchange between rings and a means of guiding them. Each ring slid through sleeves in the nodal structures, constrained by frictionless magnetic fields. The rings themselves were dark bands studded with myriad tiny windows and the occasional larger illuminated space.
The outermost triplet of rings was ten kilometres across and simulated gravity at two gees. One kilometre of empty space inwards, a smaller triplet of rings spun within the outermost shell, simulating gravity at one and a half gees. One kilometre in from that was the one-gee ring triplet, consisting of by far the thickest and most densely populated set of rings, where the majority of the Conjoiners spent the bulk of their time. Nestling within that was the half-gee triplet, which in turn encased a transparent central central sphere that did not rotate. That was the null-gee core, a pressurised bubble three kilometres wide stuffed with greenery, sunlamps and various microhabitat niches. It was where children played and elderly Conjoiners came to die. It was also where Felka spent most of her time. Nightshade decelerated and came to a stop relative to the outermost triplet. Already, servicing craft were emerging from the whirling rings. Clavain felt the jolts as the tugs latched on to Nightshade’s hull. When he had disembarked, his vessel would be hauled towards the shipyards quilting the chamber’s wall. There were many ships already berthed there: various elongated black shapes hooked into a labyrinth of support machines and repair systems. Most were smaller than Clavain’s ship, however, and there were no genuinely large vessels.
How fast will the ship have to spin in order to provide acceptable gravity?
Ca = 0.011 * Cr2 * Cl
Cl = Ca / (0.011 * Cr2)
Cr = sqrt( Ca / (0.011 * Cl))
where
Ca = centrifugal artificial gravity acceleration at point X (m/s2)
Cl = distance from point X to the center of rotation (m)
Cr = rotation rate at point X (rotations per minute)
Remember that 1.0 g is 9.81 m/s2. Notice that as point X is moved further from the center of rotation the artificial gravity increases.
Instead of doing the math yourself, you can cheat and use SpinCalc.
CALCULATING SPIN
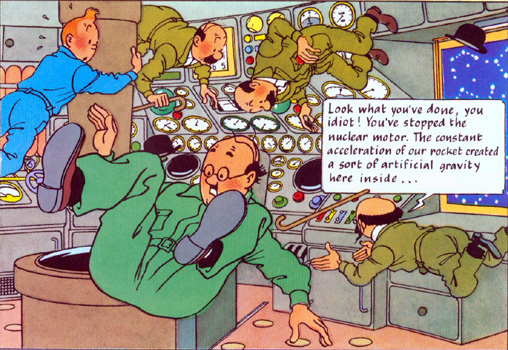
"Soup's on," announced Lopez. "This is your messroom. Lunch in a few minutes." Behind Lopez, secured firmly to the far wall, were mess tables and benches. The table tops faced Matt -- under him, over him, or across from him -- what you will. It seemed an impractical arrangement. "I'm not very hungry," one youngster said faintly. "You ought to be," Lopez answered reasonably. "It's been five hours or more since you had breakfast. We're on the same time schedule here as Hayworth Hall, zone plus eight, Terra. Why aren't you hungry?" "Uh, I don't know, sir. I'm just not." Lopez grinned and suddenly looked as young as his charges. "I was just pulling your leg, kiddo. The chief engineer will have some spin on us in no time, as soon as we break loose from the Bolivar. Then you can sit down on your soft, round fanny and console your tender stomach in peace. You'll have an appetite. In the meantime, take it easy." Two more squads filtered in. While they waited Matt said to Lopez, "How fast will the ship spin, sir?" "We'll build up to one gravity at the outer skin. Takes about two hours to do it, but we'll eat as soon as we're heavy enough for you groundhogs to swallow your soup without choking." "But how fast is that, sir?" "Can you do simple arithmetic?" "Why, yes, sir." "Then do it. The Randolph is two hundred feet through and we spin on her main axis. The square of the rim speed divided by her radius — what's the rpm?" Matt got a faraway look on his face. Lopez said, "Come, now, Mr. Dodson — pretend you're heading for the surface and about to crash. What's the answer?" "Uh-I'm afraid I can't do it in my head, sir." Lopez looked around. "All right — who's got the answer?" No one spoke up. Lopez shook his head mournfully. "And you laddies expect to learn to astrogate! Better by far you should have gone to cow colleges. Never mind — it works out to about five and four-tenths revolutions per minute. That gives one full gravity for the benefit of the women and children. Then it's cut down day by day, until a month from now we're in free fall again. That gives you time to get used to it — or else."
Ed note: 200 foot diameter = 61 meters diameter. 61 / 2 = 30.5 meter radius.
1 g = 9.81 meters per second.
Cr = sqrt( Ca / (0.011 * Cl))
Cr = sqrt( 9.81 / (0.011 * 30.5))
Cr = sqrt( 9.81 / 0.3355)
Cr = sqrt( 29.24)
Cr = 5.4 minutes
Someone said, "Gee, it must take a lot of power." Lopez answered, "Are you kidding? It's done by electric-braking the main axis flywheels. The shaft has field coils wound on it; you cut it in as a generator and let the reaction between the wheel and the ship put a spin on the ship. You store the juice. Then when you want to take the spin off, you use the juice to drive it as a motor and you are back where you started, free for nothing, except for minor losses. Savvy?" "Er, I guess so, sir." "Look it up in the ship's library, sketch the hook-up, and show it to me after supper."
From SPACE CADET by Robert Heinlein (1948)
Problems with Spin Grav
Adding a centrifuge to a spacecraft adds entire new categories of headaches for ship designers.
Coriolis Effect
Since Ceres has been spun up to provide 0.3 g at the rim, the Coriolis effect makes things act peculiar. Spins at 0.0239 rotations per minute, about 1175 m/s at the spin equator or about x2.3 Ceres escape velocity.
Since Detective Miller was born and raised on Ceres he knows how to fill a glass with the Coriolis effect. Since he drinks too much he especially knows how to fill a glass with moss whiskey. Drinking too much will also give him lots of practice with using a urinal with the Coriolis effect.
From The Expanse episode #2
Figure 1.
The Coriolis Effect is due to "rotating frames of reference", the latter means that if you are spinning around but think you are stationary, the universe looks weird. The Coriolis effect is one of the three "fictious forces" that rotating frames of reference is prone to (one of the other fictious forces is the centrifugal forces being used for artificial gravity).
But you really do not need to know all of this. The point is that inside a centrifuge or other spinning method of creating artificial gravity, moving objects appear to move in curves instead of straight lines. I mean other than the ordinary curve you see when you throw a ball and gravity tugs it down to the ground.
The practical point is the list of moving objects whose path curves due to the coriolis effect includes the fluids in one's inner ear. Which can cause nausea.
Refer to Figure 1. It is a large spinning disk like a merry-go-round. There is a person standing on the red dot. There is a black ball at the center which moves to the rim.
To an outside observer, they see the disk and the person spinning, and the black ball moves in a straight line.
But to the person on the red dot, they see themselves and the disk as stationary, and the black ball moves in a curve.
You can see this yourself if you go to a children's playground that still has an old fashioned merry-go-round, sit on it, spin it up, then start throwing some balls. Weird, huh?
Video demonstration of Coriolis Effect click to play video
The amusing effects are the crazy trajectories of thrown objects, such as the whisky being poured in the image above. However it is not so amusing if the moving object is a bullet. If you fire a slugthrower inside a spinning habitat you will miss every time until you learn to correct for the Coriolis effect.
Refer to Figure 2. In a spinning space habitat, tossing a ball towards the spin axis makes it travel to the opposite side. But from the person spinning inside, the ball appears to loop-the-loop. The ball is traveling at such a speed that the time it takes to go from one side to the other is the same time as one-half the habitat's spin rate. If a bullet was traveling at the same rate you could inadvertently shoot yourself (in practice the habitat would have to be spinning rather rapidly and bullet traveling rather slow).
Currently there are only two methods of generating artificial gravity. The first one is to constantly accelerate your spaceship toward your destination about half of the way, then flip turn the ship 180 degrees and constantly decelerate the craft to a halt at the destination. Whatever acceleration the ship performs is the amount of artificial gravity the inhabitants will experience onboard. Such vessels are call Torchships and their drive is calls Torch drive. Sadly, while the technologies that allows a ship drive to produce constant acceleration close to Terran 1g level are within known science they are still appear to be off the table for a long way to come. Of course, it couldn't applied to space stations or terrestrial colonies on the surface of low gravity bodies, like an asteroid mining facility.
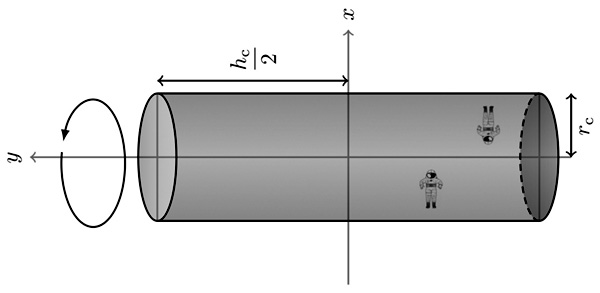
A simpler approach is to spin a segment or all of the spaceship or space station around an axis at a constant spinning rate to make, via centrifugal force, an artificial gravity on the inner walls of the rotating canister where the “up” direction is toward the axis and the “down” is away from. The magnitude of the gravity is determined by two factors: the spin rate, which is uniform everywhere in the spinning segment of the ship or station and the distance one is from the axis. Therefor to produce uniform value of gravity that is identical to the inhabitants and perpendicular to the floor, a spin gravity dictate the habitat to shape along circular geometry: ring, cylinder and torus.
Mostly, the spin gravity is identical to the real one. Sure, you have variation in the gravity if change your distance from the axis when you climb a ladder and such but since the living space is arranged circularly that usually unnoticed. Another thing that difference from real gravity is the influence of the Coriolis Effect. Whenever a body moves in the rotating set of reference perpendicular to the spinning axis it will experience strange drift aside perpendicular to its velocity. The magnitude of the force for a given spin rate will be determined only by the body velocity in the rotation plane which mean that a stationary body won't feel it.
The direction of the force will always be perpendicular to velocity and pointing to the opposite side of the rotation direction. In plain terms, any object traveling in the rotation plane: up(toward the axis), down(from the axis), Westward(spinward) or Eastward (counterspinward) will seem to be caught in unfelt tornado winds, one that its axis parallel to the ship or station rotation axis but reversed in direction. For upward movement the body will drift spinward, for downward movement a drift counterspinward, for spinward it be downward and for counterspinward it be upward.
Moving objects parallel to the spin axis will drift too, the motion parallel on be effect but the object still fall down to the floor cause by the artificial gravity and will drift counterspinward like an object dropped down. Normally here on Earth we neglect Earth rotation and the influence of Coriolis Effect when it comes to firearms' ballistics since Earth complete a revolution every 23 hours, 56 minutes & 4 seconds. When launching projectiles inside a rotating can which revolve several time a minute such force couldn't be written off. The key factor determine the bullet curved trajectory is the ratio between its velocity relative to the surrounding (muzzle velocity initially) to the shooter velocity relative to observer outside of the spinning set of reference. Since the shooter is traveling with the rest of spinning ship or station his speed is the rim velocity. If the shooter is facing toward the spin direction, spinward, the bullet will suffer greater bullet drop than the felt gravity should inflict. When the shooter turn back and fire counterspinward the bullet will gain a 'lift' thank to Coriolis, for a velocity ratio of 1 the bullet will fly in a close circle around the rotation axis with constant distance from the floor till eventually air drag will rob the bullet's energy and it slowly decent to the floor. Shooting upward toward that ladder climber the shooter ought to aim slightly counterspinward or keep missing as the bullets drift spinward. In contrast, the climber need to aim spinward to hit the shooter at the bottom of the ladder. Such drift could create some bizarre circumstances:
If the station designers bless it with circular corridors and you have a tango up spin barricade you could shot counterspinward and your bullets will complete a full round and bite the enemy in the rear! If an enemy is placed on a platform directly overhead a shooter at ground level can aim spinward to land bullets on his head, the enemy can also hit you by fire spinward too. Such opportunistically trajectories greatly depends upon that velocity ratio and clear field of view and firing that doesn't really exist in small space stations and always never in spaceships. For the rim velocity to be in the magnitude if typical gun bullets, which are in the hundreds of meters per second the space station should be in the range of couple hundreds meter in radius, for a O'Neill Cylinder 8km in diameter rotating once every two minutes the rim velocity is 200 m/s, comparable to slow sub sonic-pistol ammo, if the bullet is very aerodynamic and fired counter spinward it will cruse a significant path above the ground before falling. Every shot against a tram running parallel and close to the axis or shot down one slowly falling Captain John Sheridan will have to account this drift too.
If the ladder is inside narrow tube as one inside the station's spokes the drift will drive the two shooters' bullets hitting the tube walls instead each other.
As it turns out, there are limits on the rotation rate. The Coriolis effect can induce nausea. Sort of like spin motion-sickness. You do not want a bunch of green-faced astronauts/star-liner passengers/space habitat colonists moaning that they are going to die and vomiting everywhere.
The only way to increase gravity (Ca) without increasing the RPMs (Cr) is to increase the spin radius (Cl). What this means is you take the required gravity and the maximum rotation rate allowed, plug it into the Cl = Ca / (0.011 * Cr2) equation, and you'll see what sort of spin radius you will have to deal with.
If the spin radius is too huge (I don't wanna blasted spaceship with a centrifuge two-hundred freaking meters radius!), you'll have to decrease the amount of gravity, increase the rotation rate, or both. That or put up with a lot of vomiting astronauts.
Up to 2 rpm should be no problem for residents and require little adaptation by visitors.
Up to 4 rpm should be no problem for residents but will require some training and/or a few hours to perhaps a day of adaptation by visitors.
Up to 6 rpm is unlikely to be a problem for residents but may require extensive visitor training and/or adaptation (multiple days). Some particularly susceptible individuals may have a great deal of difficulty.
Up to 10 rpm adaptation has been achieved with specific training. However, the radius of a space colony at these rotation rates is so small (under ~20 m for seven rpm) it’s hard to imagine anyone wanting to live there permanently, much less raise children. But military personnel could be trained to tolerate it.
Discovery Radius 5.5 m
Rotation Rate
Gravity
7.5 (rpm)
0.347 gs
8 (rpm)
0.395 gs
9 (rpm)
0.500 gs
10 (rpm)
0.617 gs
However, the data on artificial gravity is a bit out of date. The original research into it had subjects sick at 3 RPM and incapacitated at 6 RPM+.
However, more recent research suggests that, by using incremental increases in rotation and making a few limb movements, adaptation can occur with almost no feelings of nausea. The old research (done on about 30 subjects) simply went from zero to full rotation.
Moreover, the adaptation can be simultaneous with non- rotational adaptation. So, moving in and out of the rotating habitat for maintenance or whatever is no problem. It's thought that rotation rates of up 7.5 to 10 RPM are possible.
This makes Discovery's 5.5m radius centrifuge a real possibility. In fact, with 10 RPM, you could crank it up to a handsome 0.61 G, or 0.34G if you want to play it safe at 7.5RPM.
Troy Campbell
Bottom line: 1 g is comfortable from 2 to 4 rpm, and maybe even up to 6 rpm.
Composite comfort chart from "Space Settlement Population Rotation Tolerance," Al Globus and Theodore Hall, preprint, June 2015.
The authors took data from five previous studies, and plotted them all in a common format (see Hill chart below). The regions are colored according to the number of "votes" for comfort they got from each of the five studies. Green is where all five agree is the comfort zone, red is where all five agree it is uncomfortable. Intermediate shades of yellow and orange are where the studies disagree.
Diagonal lines 6 m/s and 10 m/s are centrifuge rim speed limits. Other diagonal lines are for g-level in the centrifuge. There are vertical lines at 2 and 6 rpm, and horizontal lines at rotation radius 12 and 15 m.
Comfort chart from Hill, Paul R.; Schnitzer, Emanuel (1962 Sep). "Rotating Manned Space Stations." In,
Astronautics (vol. 7, no. 9, p. 1418).
At 1g this chart suggests that rates up to 4 rpm are in the comfort
zone. (Note that, between 1 and 2 rpm, and between 2 and 3, there are intermediate tick marks
corresponding to approximately 1.5 and 2.5.)
click for larger image
Gyroscopic Precession
Now, one would think that such a centrifuge would act as a titanic gyroscope, doing its best to prevent the ship from changing its orientation. The obvious solution is to have two counter-rotating centrifuges, so their torque cancels out. Just like Contra-rotating propellers on an airplane. Alternatively you can use one centrifuge plus a monstrous counter-rotating flywheel with the same mass.
Aerospace Engineer Bill Kuelbs Jr points out that if the centrifuge is a sufficiently large percentage of the ship's total mass, it will not prevent turning. What it will do is alter the axis of any turning force by ninety degrees. The technical term is gyroscopic precession. Rev up a toy gyroscope and try to turn it and you'll see what I mean.
The solution to that is fairly simple. The turning thrusters will have to be effectively at ninety degrees to where you'd expect. In reality, this means that when the centrifuge is spinning, the "pitch the nose downward" control button will actually fire the "yaw to the left" thruster.
Spaceships or colonies that rotate to produce artificial
gravity will effectively be large gyros. As anyone who has played
with a toy gyroscope will know, that can have an interesting
effect. Any attempt to turn a gyro about an axis perpendicular to
the axis on which it is spinning will produce a turning effect
about a third axis perpendicular to both of the others. It's
called precession (but if you're bothering to visit sites like
this you probably knew that already). Anyway, the following
considers ways of getting around problems associated with
precession.
The first way, for a colony on solar orbit, would be for the
axis of rotation of the colony to be perpendicular to the plane
of the orbit. Such arrangements have been proposed, with sunlight
reflected into the colony via an arrangement of mirrors including
one, not rotating with the colony, turning the light through 90
degrees onto another, circular arrangement of mirrors, from which
it would be reflected into the colony. This has been suggested
for toroidal or axially extended toroidal colonies (Figure 1).
Figure 1.
Aside from this single case (of only attempting to turn the
ship or colony about the axis on which it is already rotating)
the approach to controlling precession is that, essentially,
something spinning could be coupled with something else spinning
on the same or a parallel axis but in the opposite direction. The
'something else' could be identical (other than spin direction,
of course) (i.e. homologous) or different in either mass,
rotation rate or diameter, or rather in a combination of these
(i.e. heterologous).
Homologous precession control
O'Neill's idea for L5 Lagrange point
cylindrical colonies envisaged that they would collect light via
mirrors that required the rotational axis of the cylinder to be
kept pointing towards the sun. Obviously this would involve one
complete rotation of the cylinder about an axis perpendicular to
the rotational axis in one year. The plan was, therefore, to
couple together pairs of contra-rotating cylinders situated one
'above' the other (if the plane of the ecliptic is taken to be
the horizontal). The cylinders would be joined by a compression
tower at one end and a tension tower at the other, this
application of a couple generating in its turn the necessary
gyroscopic turning forces for the sunwards pointing (Figure 2).
It should be noted that this arrangement may only work for
rotation of the cylinder pair in one direction and in one plane.
Rotation in the opposite direction could collapse the tension
tower, which would now be in compression, and would test the
tensile strength of the compression tower. Any external forces
which caused rotation of the pair in another plane could cause
forces that would make the colony pair skew relative to each
other, which if taken far enough could cause them to touch (with
whatever unfortunate consequences).
Figure 2.
Alternatively, homologous precession control could be achieved
with the rotating portions sharing a common axis of rotation. An
example of this would be axially extended tori 'on a stick'
(Figure 3). For example, if four such identical tori were used,
with numbers 2 and 3 rotating in one direction and 1 and 4 in the
opposite direction, there should be net cancellation of
gyroscopic forces. One disadvantage of this design is that it
would require some ingenuity to get sunlight into the innermost
tori. It may be best suited to artificial lighting in an
interstellar ark type of design. In such a case the common axis
could also serve to reduce the amount of impact shielding
required at the 'front' and of engine radiation shielding
required at the 'back', compared to a side by side pair of
cylinders, because of the reduced 'frontal' area (always assuming
that it was traveling along the line of the axis of rotation). As
a further example, the 'Explorer Class' 'fast' interstellar ship
design study suggests contra-rotating segmented tori as
habitations, to control torque effects on the ship as a whole
when the habitations are spun up and down for different
(accelerating and non-accelerating) portions of the proposed
flight.
Figure 3.
Heterologous precession control
Generally this approach can allow more flexibility than is
possible with homologous designs. An example of this would be the
'Sunflower' type colony, with a torus and a short cylinder
sharing a common axis (Figure 4), the outer torus providing
agricultural space for the inner living area. The contra-rotation
of these could be used to allow an appropriate arrangement of
mirrors to maintain sun-pointing orientation.
Figure 4.
The arrangement shown above may work in an in-system colony,
but it would share the problems, mentioned above, of a side by
side pair of cylinders if used for an interstellar ark, in that
the frontal area to be shielded may be unnecessarily large. As
for the homologous colonies the preferred approach in this
scenario may be to make all of the habitats the same diameter as
well as rotating them about the same axis. One design with this
arrangement would be to take the four tori 'on a stick' already
mentioned and join the middle two together, giving a larger
central colony section (Figure 5).
Figure 5.
However, it may be considered preferable that instead of
adding complexity by having three habitats, the central habitat
could be balanced by contra-rotating masses at each end, rather
than habitats. This seems at first sight wasteful of energy and
materials, particularly in the case of a habitat that needed to
be accelerated and decelerated like an interstellar ark. However,
in such a case erosion/collision shielding would be needed in
'front' of the habitat and probably radiation shielding at the
'back' of the habitat to protect against the effects of the
engine (assuming something like a fusion or antimatter engine),
so the mass may be in place anyway and could be spun without too
much extra complication (Figure 6).
Figure 6
A further approach, involving shielding, to controlling
gyroscopic effects would be that of making the main colony cosmic
ray shielding independent of the pressure vessel that forms the
habitat. This has been suggested for earlier 'Island One' type
habitats such as, for example, the NASA/Ames 1975 Summer Study
proposal of a torus rotating inside a 'tire' of cosmic ray
shielding or O'Neill's Bernal Sphere design with an outer shield
of lunar slag between two thin spherical shells. O'Neill suggests
rotating the colony by reaction against the shield, which should
give automatic balancing of precessional effects for the colony
as a whole (Figure 7). Similarly the Summer Study suggests using
the shielding as reaction mass for rotation of the main colony,
noting that the shielding, given its much larger mass, would
rotate much more slowly (and would have to rotate more
slowly given its intrinsically lower strength, it being
constructed of mechanically fastened slag blocks, and because its
great weight would tear the colony apart if it were to rotate as
one with the colony). One particular feature of contra-rotating
colony and cosmic ray shield is that they would be moving past
one another at a separation of a few metres at some hundreds of
miles per hour, typically, which would require some care in
avoiding 'scraping' of one against the other and which could make
maintenance of either a somewhat hazardous procedure
For larger colonies the structure needed to provide pressure
and rotational strength should also be thick enough to give
cosmic ray shielding, so the option of rotating against an outer,
concentric, contra-rotating shield would not provide the
relatively economical and elegant solution that it could for
smaller colonies.
(ed note: these comments are about independent centrifuges)
If a spaceship has a spinning section to provide simulated gravity, and lest the whole ship is intended to spin, that section would need to be set in motion somehow.
If it is done by reaction engines, the connection between the non-spinning part of the ship and the spinning section would need to be literally free of any friction, otherwise, that part of the ship would eventually begin to spin also, and slow down the spinning section. Or another set of reaction engines would be needed to keep it from spinning.
But what I find more problematic is the above mentioned conservation of momentum. In a vessel with a spinning section set in motion by mechanical means or even contact-less linear electric motors strung around the circumference of the non-spinning section and the hub of the spinning section, the non-spinning section would obviously instantly spin once the spinning section is fired up, only in the opposite direction.
There would need to be a counter-rotating flywheel to counter this, spinning in the opposite direction of the main spinning section, or even a complete second spinning section turning the opposite way. Since a spinning section would need to be large not just to provide adequate room but also to have the necessary diameter to not necessitate a very high frequency of revolution, a flywheel would have to be substantial, and unless it has a double use, such as a radiation shield or the like, would be just a big lump of dead weight. Logically, a second habitable spinning-section would be preferable. Of course, a constantly burning reaction engine might be used, much in the same way as the tail-rotor of a helicopter, but that would just be a massive waste of fuel.
Also, there is the question of sealing the non-spinning section, like on the Discovery from 2001. Shaft-seals and the like would have to be huge lest the only way to get from the spinning section to the non-spinning section be so small as to necessitate contortionist-midget-astronauts. Huge seals are problematic, creating huge friction and needing to be kept clean. Labyrinth seals would be friction-less but not airtight (bad in a spaceship, unless one wants to include the entire spinning-section in the pressurised area of the ship). One could, of course, create to separate habitable environments for the two sections of the ship, but that would entail suiting up and cycling through two airlocks every time one has to rush from ones bunk to the control room.
Guido Lißmann
INDEPENDENT CENTRIFUGE PROBLEMS
(ed note: some of these problems apply to the independent centrifuge, others to the independent gimbaled centrifuge)
I have a very basic problem with spin sections in spaceships.
1) The more things are meant to move, the more they wear out. Making a gimbaled joint that doesn't become the maintenance nightmare of the F-14 swing-wing is a tricky proposition — particularly in space where there's vacuum welding, thermal differences from ambient solar radiation, and worse.
2) How the heck do you get the plumbing to work? I guarantee you that rotating your typical bathroom through 90 degrees will make every water conveyance run wrong. Not to mention the times in transition when it'll be at zero gee.
Or do you put in twice as many bathrooms?
The reason why ships in Ten Worlds don't have spin sections come from the maintenance issues, the fact that the trips themselves are months, not years in duration and that most of the waypoints have spin gravity on can cities.
And the "90 degree off-axis aggressive maneuvers with the portapotty" problem.
On a related note, when your spin section arms are extended out, where do your radiators go?
(ed note: Guido Lißmann notes that the plumbing problem has a couple of solutions. Route the pipes through the pivot center with some kind of rotating sleeve, have self contained plumbing systems totally within the centrifuge, or resort to chemical toilets like used in passenger aircraft.
)
Ken Burnside
From Outrim by J. Mauloni. Another scientifically accurate webcomic.
REVOLUTIONARY
blacklight (n.): an external window in a large space habitat, looking out into space (see: the black). The word was deliberately coined in opposition to skylight, since due to the operation of spin gravity, the majority of blacklights are in the floor.
It is considered both polite and practical to throw a rug over the blacklights when flatlanders come to call.
– A Star Traveler’s Dictionary
(Well, no-one’s going to call an UV light a blacklight when they can see UV natively, are they?)
For dependent centrifuge that is a fat ship instead of a ship-with-donut, under spin the viewports will be in the floor
Under spin, the viewports will be in the floor
In The Expanse in the interior of a Ceres spun-up for artificial gravity, the airlocks are in the floor as well. As this scum-bag slum-lord discovers when Detective Miller throws him in to teach him a lesson about regularly changing the air filters in his slum.
Spin Balance
Material arrives from the Hub by Elevator Cage, and is distributed from the Loading Area in accordance with decisions made by the Weight Control Center, which is charged with preserving the station's balance.
Balance must be carefully maintained, with each section painstakingly adjusted to the same weight as the section diametrically opposite it on the wheel. If this were not done, the revolving station might wobble, making the synthetic gravity uneaven, disturbing the delicate measurements of the scientists within—and weakening the entire structure dangerously.
From Man Will Conquer Space Soon! Collier's March 22, 1952
artwork by Fred Freeman
Another problem is Spin Balancing. The spinning ship or centrifuge will have to make sure its mass is evenly balanced around the circumference, or it will start acting like an unbalanced clothes washer on spin cycle.
Video Clip "Washing machine with a brick in it" turn off volume, its very loud click to play video
Without load balancing, the simple act of the crew walking around could be a disaster. The centrifuge could wobble: making the gravity uneven, causing structural damage/centrifuge destruction, and causing the center of gravity to oscillate.
The latter means the center of spin will wander around instead of being rigidly located at the designed spin axis. Which can be a real problem if the spin axis has the docking port. The situation will be just as nasty if the centrifuge is a wheel space station with a spacecraft landing bay at the spin axis. Generally the landing bay is de-spun by spinning contrary to the centrifuge, so incoming spacecraft can land in something stationary. If the space station is wobbling, so will the landing bay. Docking will be much more dangerous than a fighter jet trying to land on the deck of a sea-going aircraft carrier during a typhoon.
Even worse, spacecraft tend to have optimized structural support because every gram counts. The ship's spine will be very strong along the thrust axis, but being jerked sideways by an oscillating centrifuge could snap the spine like a piece of uncooked spaghetti.
Load balancing could be accomplished by a series of ballast tanks and a network of pipes to pump water from one tank to another. In NASA-speak, these are called ballast trim tanks.
BALLAST TRIM TANKS 1
Twenty years later (1949) Wernher von Braun independently came up with a very similar design. Though he had never read of the Wohnrad, his station also was wheel-shaped, 250 feet across, and rotating to give 1/3 g artificial gravity. He proposed the wheel have two or three floors and the atmosphere be oxygen and helium at one-half sea level pressure. He also devoted attention to pumping water into ballast tanks so the station would continue to spin evenly as people went about their business inside, redistributing the masses within the wheel. Von Braun proposed to use this station as a base for the outfitting of expeditions to the moon and Mars.
The
complexities inherent in the momentum control system arise from the
limits for center of gravity offset and for wobble allowed by the
rotating torus. The overall inertial balance of the torus wlll tolerate
crew members moving about within a section and individuals traversing the
circumference. On the other hand, the shifting of a significant weight
(200 kg) would require a balance trim such as the transfer of
ballast water between holding tanks. A major shift of weight (all the
crew to dinner at one sitting) would require a programmed and controlled
counter-movement of ballast.
In addition, the (support) area includes
tankage which will accommodate as much as 10,000 kg of water
for trim ballast distributed and transferred among four locations In
response to inertial control requirements.
Concepts for Elements within the Hub
The Large Rotation Transfer Unit provides the means to exchange
spacecraft sub-assemblies or items of equipment between the central tube
and the rotating portion of the Space Station. The unit accepts the
freight elevators from Spokes 2 and 4 plus the variable gravity
facilities from Spokes 1 and 3.
In an operation to transfer items from the torus
to the central tube, the transfer unit would be rotating at torus speed
relative to the central tube and be locked into a position that aligned
the elevator guide rails. As the elevator moved into the spoke-extension
sections, a ballast transfer would occur that put water into the counterbalance
tank on the transfer section. In the same motion, the elevator
would leave the carrier for the force equalizer and complete the travel
against the partial gravity present at the hub.
With the trim completed, the drive systems engage to slow the
rotation of the transfer unit, such that the energy goes into the
rotating torus. A shift of trim ballast from hub to torus maintains a
constant rotation (e.g., constant angular momentum). The transfer
section comes to a rotational stop with the elevator registered to the
main transfer port in the central tube.
The equipment is then transferred by manipulator into the bays of
the central tube for use as intended (e.g., Spacecraft assembly or
service). The transfer of equipment or elements for service from the
central tube into the torus involves a reversal of the procedure. In all
cases, the acceleration or deceleration of the transfer unit occurs with
a balanced system. The adding or subtracting of rotational momentum
interacts with the torus, and the rotation of the torus is maintained by
a radial transfer of ballast.
click for larger image
7.1.2.1 The Personnel Unit Concept
The most frequent transit requirement will involve crew members and
small items of equipment moving between the central tube and the torus.
The personnel transfer unit has been configured to minimize the effects
of gravity change Coriolis forces and differential motions. The
personnel carriage element becomes a 3 m (10 ft) cube which travels
along the "shade" side of a spoke. The carriage has two sets of local-vertical
opening doors. One set faces the wall of the spoke, and the
other faces radially inward.
In traversing the spoke, the elevator
follows a pair of rails which include a rack gear on one face that
engages the drive mechanism on the carriage (e.g., an electric motor with
a worm drive into a reduction gear). Coriolis effects and power demands
effectively limit the traversing velocities to 2 m/sec
maximum.
In traversing operations, the elevator will require two
independent counterbalances. The balance required for maintaining the
angular momentum and center of gravity for the torus requires shifting an
equivalent mass of ballast water in a direction opposite to the motion of
the elevator. Ballast transfer tanks must be emplaced within both the
torus and the hub together wlth pumps and controls.
The effective
suspended weight of the carriage will vary in proportion to the radial
position along a spoke. A realistic drive system (less than 5 kW)
dictates a force balancing system which inherently follows the force
profile; a pneumatic accumulator has the appropriate characteristics.
The force counterbalance system for the personnel transfer elevator
utilizes a pair of pneumatic cylinders of 20 cm diameter
operating wlth a 3 m stroke through a set of pulley blocks
(distance multiplier) and cables up the guide rails.
In operation, the
pneumatic cylinders would be pressurized to a level which matched the
weight of the elevator and its load at the torus. The hoist requirement
then would only need to overcome the friction and drag effects. Each
llft or lowering would have the equalizing pressure tailored to that
particular load. The configuration, as summarized, places these
equilibrator cylinders and cable blocks in the torus.
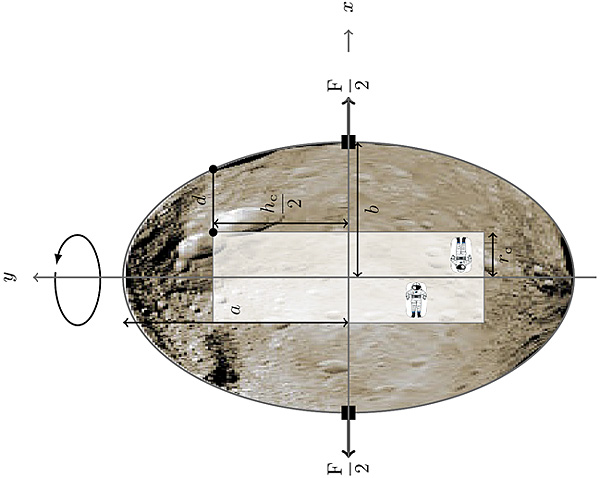
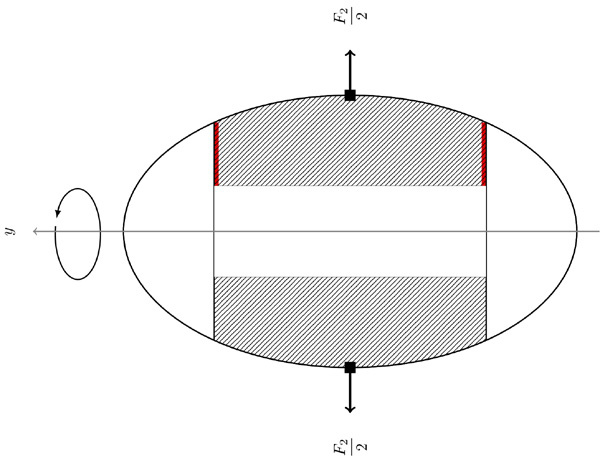
The modules are on the rim of a centrifuge 80 meters in diameter rotating at 4.2 rpm to provide an artificial gravity of 0.8g. This provide enough gravity to reduce bone decalcification, and is below the 6 rpm spin nausea limit. This puts the modules under a shear stress of 22 MPa, which the aluminum-lithium allow can easily handle.
The centrifuge ring is supported by four radial supports. Each is 38 meters long, with an out side diameter of 4 meters with a 13.2 centimeter thickness.
As with all centrifuges, astronauts and other objects moving around will unbalance the centrifuge and make it unstable. The four centrifuge radial support arms have movable masses ("mass elevators") which dynamically ensure the centrifuge center of mass stays positioned on the centrifuge center of rotation. Assuming a maximum imbalance of 52.5% to 47.5%, and a radial arm length of 40 meters, each movable mass will need to be 481,000 kilograms. They will be made of cast iron, cylindrical with a radius of 1.8 meters and a length of 6.15 meters. To avoid problems with coriolis acceleration, the movable masses should have a velocity of no higher than 0.1 m/s when they are moving to correct an imbalance.
When an independent centrifuge is braked to a halt (or if a derelict spacecraft has a spinning centrifuge that gradually brakes due to friction in the bearings), the conservation of angular momentum makes the entire ship spin on the centrifuge's rotational axis.
Since most independent centrifuges are attached to the ship much like a wheel spinning on a fixed axle, the ship will start spinning on its long axis. A crewed ship will use their reaction control system to stop the spin. A derelict that is abandoned (or crewed with the dead) will of course just keep spinning on its long axis.
Which is why people who watched the movie 2010: The Year We Make Contact were puzzled by the sight of the Discovery flipping end-over-end like a blasted baton twirler's baton.
artwork by O. Rennert click for larger image
Discovery's independent centrifuge is mounted in standard fashion, with spin axis and ship long axis coincident to each other.
So when the Leonov approached the derelict Discovery, you'd expect that it would be spinning on its long axis.
Instead, the freaking ship is flipping end-over-end. What the frak is going on?
A long thin object spinning about its roll axis is the object's minimum moment of inertia mode. Windmilling end-over-end is the maximum moment of inertia mode. As it turns out, a long thin object spinning in minimum moment of inertia mode that has any flex to it at all will dissipated a small amount of rotational energy. This will destabilized any rotation that was not in the maximum moment of inertia mode. On general grounds, the body ends up in the spin state that minimizes the kinetic rotational energy for a fixed angular momentum (this being the maximal-inertia axis).
Bottom line is: since the Discover is a long thin object, when the centrifuge braked to a halt causing it to spin on the roll axis, the flex in the ship gradually precessed the spin axis to end-over-end. The movie got it right.
Explorer 1
This was actually observed in the real world.
In 1958 (shortly after I was born) the Explorer 1 space probe was launched as part of the International Geophysical Year. The science package was designed by Dr. James Van Allen. The temperature sensors and micrometeorite impact sensor provided mostly uninteresting data. The Geiger radiation counter on the other hand screamed bloody murder
at certain parts of the orbit and zero radiation at others. This is now called the Van Allen Radiation Belt and was considered to be one of the outstanding discoveries of the International Geophysical Year. But I digress.
The point was that Explorer 1 was design to spin around the roll axis, but refused to do so. Yep, it precessed to do an end-over-end baton flip in only a single orbit. You may notice the four long flexible antennae, they worked admirably to dissipate the rotational energy. This observation motivated the first further development of the Eulerian theory of rigid body dynamics after nearly 200 years, or so I've been told.
As it turned out a scientist named Ronald Bracewell knew this was going to happen, because galaxies spin the same way. Bracewell called engineers at the Jet Propulsion Laboratory to warn them, but the security people wouldn't let him talk to the engineers.
WINDMILLING DISCOVERY
Even in the best of circumstances, it is not easy to board a derelict and uncooperative spaceship. Indeed, it can be positively dangerous. Walter Curnow knew that as an abstract principle; but he did not really feel it in his bones until he saw the entire hundred-metre length of Discovery turning end-over-end, while Leonov kept at a safe distance. Years ago, friction had braked the spin of Discovery's carousel, thus transferring its angular momentum to the rest of the structure. Now, like a drum-majorette's baton at the height of its trajectory, the abandoned ship was slowly tumbling along its orbit. Discovery was windmilling about two hundred metres away, following them in orbit around Io, which filled half the sky. Jupiter was invisible, on the other side of the satellite. This was a matter of deliberate choice; they were using Io as a shield to protect them from the energies raging back and forth in the flux-tube that linked the two worlds. Even so, the radiation level was dangerously high; they had less than fifteen minutes before they must get back to shelter.
There was only one safe way to approach the derelict, and that was along the axis around which it was slowly revolving. Discovery's centre of rotation was approximately amidships, near the main antenna complex, and Brailovsky was heading directly toward this area, with his anxious partner in tow. Discovery was now a huge, slender dumbbell slowly flailing the entire sky ahead of them. Though it took several minutes to complete one revolution, the far ends were moving at an impressive speed. Curnow tried to ignore them, and concentrated on the approaching — and immobile — centre.
Now that they were firmly attached to the hub of the windmilling ship, he was no longer conscious of its rotation — especially when he fixed his gaze upon the metal plates immediately before his eyes. The ladder stretching away into the distance, running along the slender cylinder that was Discovery's main structure, was his next objective. The spherical command module at its far end seemed several light-years away, though he knew perfectly well that the distance was only fifty metres. 'I'll go first,' said Brailovsky, reeling in the slack on the line linking them together. 'Remember — it's downhill all the way from here. But that's no problem — you can hold on with one hand. Even at the bottom, gravity's only about a tenth gee. 'First thing we've got to do,' muttered Curnow, after sliding several metres down a corridor before he could grab a handhold, 'is to stop this damned spin. And we can't do that until we have power. I only hope that Dave Bowman safeguarded all systems before he abandoned ship.' 'The best news is that the power systems are okay. Main reactor stable, batteries in good shape. Almost all the circuit-breakers were open — they'd jumped or been thrown by Bowman before he left — so all vital equipment's been safeguarded. But it will be a very big job checking everything before we have full power again. We're going into the carousel now, to check the bearings. I want to get it running as soon as possible.' 'Pardon me, Walter — but is that important? Gravity's convenient, but we've managed without any for quite a while.' 'I'm not after gravity, though it will be useful to have some aboard. If we can get the carousel running again, it will mop up the ship's spin — stop it tumbling. Then we'll be able to couple our airlocks together, and cut out EVAs. That will make work a hundred times easier.' 'Nice idea, Walter — but you're not going to mate my ship to that... windmill. Suppose the bearings seize up and the carousel jams? That would tear us to pieces.' 'Agreed. We'll cross that bridge when we come to it. I'll report again as soon as I can.'
Checking Discovery's propellerlike spin was perhaps the most critical step in getting the ship under control. Sasha Kovalev compared Curnow and Brailovsky to Don Quixote and Sancho Panza, and expressed the hope that their windmill-tilting expedition would end more successfully. Very cautiously, with many pauses for checking, power was fed to the carousel motors and the great drum was brought up to speed, reabsorbing the spin it had long ago imparted to the ship. Discovery executed a complex series of precessions, until eventually its end-over-end tumble had almost vanished. The last traces of unwanted rotation were neutralized by the attitude-control jets, until the two ships were floating motionless side by side, the squat, stocky Leonov dwarfed by the long, slender Discovery.
The main design problem when adding artificial gravity to a spacecraft is that the direction of "down" while under thrust is not the same as the direction of "down" while under spin gravity. And the direction of "down" while under both thrust and spin gravity was at an angle between the two (the vector sum of the two accelerations). This can get confusing.
Why is this a problem? What was a floor under thrust might turn into a wall under spin gravity. So which surface do you mount the toilet on? If the designer is not careful, half the time the toilet will be sideways and pouring water all over the floor.
Rocket with no thrust: no direction of down.
Rocket with thrust Aft Is Down Down is parallel to thrust axis, in the direction the exhaust is traveling.
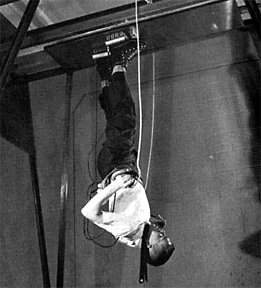
Tumbling Pigeon spinning Out Is Down Down is at 90° to spin axis, pointing away from spin axis. Unfortunate inversion of hab module gravity
Waterskiing with thrust Aft Is Down Down is parallel to thrust axis, in the direction of vector sum of exhaust.
Waterskiing spinning Out Is Down Down is at 90° to spin axis, pointing away from spin axis. Hab module gravity unchanged
Centrifuge ship with no spin and no thrust: no direction of down
Centrifuge ship with thrust Aft Is Down Down is parallel to thrust axis, in the direction the exhaust is traveling.
Centrifuge ship with spin Out Is Down Down is at 90° to spin axis, pointing away from spin axis. The spin axis coincides with thrust axis.
Centrifuge ship with both thrust and spin Aft And Out Are Down Down is at the vector sum of thrust and centrifugal force. You can only do this if spin axis and thrust axis coincides. Otherwise the spacecraft is just going to loop-the-loop like a cheap Forth of July skyrocket.
A similar problem happens with belly landers: the direction of "down" while under thrust is at ninety degrees to the direction of "down" when sitting on the runway impersonating an aircraft.
Belly lander in space with no thrust: no direction of down
Belly lander in space with thrust Aft Is Down Down is parallel to thrust axis, in the direction the exhaust is traveling.
Belly lander in atmosphere approaching landing field or landed on the ground Belly Is Down Down is in the direction of the planet's gravity.
The brute force solution is to force the crew to detach all the furniture from the floors that are now walls and put them on the walls that are now floors whenever the spacecraft changes mode. This is quite a chore. And there will be further problems with floor and wall mounted control consoles and related items. Not to mention the toilets.
The alternative is rotating the entire room on gimbals, or using a gimbaled centrifuge.
NASA's old Space Shuttle had the belly lander problem. They dealt with the problem by mostly ignoring it. The Shuttle's habitat module was laid out for "belly is down" mode. It was only subjected to "thrust is down" mode while sitting on the launch pad and during the boost into orbit. That period of time was only a fraction of the total mission time, and the astronauts were to spend that time strapped into their acceleration couches anyway. They made do with a few ladders to climb into their couches.
The pilots just had to learn how to deal with flying the shuttle on their backs with the control panels above them during lift off, and flying the shuttle on the seat of their pants with the control panels in front of them during the dead-stick landing.
Fajar Station was quite a sight — five kilometres wide with its rim docking gantries full of weight-supported ships, nestled up to station in a nose-first ring as the station spun. But all traffic was now halted, save for a few runners and shuttles, because here parked barely a kilometre off the enormous spinning twin-wheel was Phoenix — four times the size of any standard freighter, two-thirds engines and jump-lines, the remainder a cage-like shell for a rotating crew cylinder, while the shell itself bristled with weapons, external pods and combat grapples for attached shuttles and aggressive interceptions. Even at zero-V that armament could shred a big station in minutes, and ships in seconds. Thus no one in the general vicinity so much as twitching. Erik hauled himself away with difficulty, away from the bridge (of the shuttle that has just docked with the Phoenix) to where Dale and others already had the dorsal hatch open and tight. “Someone shut down the shuttle,” he told them, “she’s still on standby.” And pulled himself through the hatch into a blast of freezing air from the umbilical tube.
Then past berthing crew at the grapples, and tight space between bulkheads, secured with netting and acceleration slings where marines could ride out manoeuvres while waiting to board a shuttle. He overhanded up the corridor, past zero-G equipment bays and outfitting where a lot of marines’ gear was secured, then finally made the core hatch. The umbilical lines were humming, and he grabbed a passing handle and made sure to tuck his hands in as it yanked him up the core tube. The space was narrow and always claustrophobic, but it was the only way to move between the gravitational quarters and the non-G midships when the crew cylinder was engaged. Some designs used elevator cars, but on a ship with as many crew as Phoenix, no one had time to sit around waiting for cars to arrive.
He passed delta bulkhead, then got off at gamma-b, main-quarter, over-handed fast down the ladder until rotational gravity began to shove him into a wall, then headfirst, and he flipped over and slid down feet first with increasing speed down several levels, jumping to a new ladder each time. Finally he hit floor and ran into a corridor, heart-in-mouth the way you always were when moving about in combat — a hard thrust here would turn a ten meter corridor into a lethal drop, head first. Most crew injuries in combat were impact-related, self-inflicted by manoeuvre, and some huge number of spacers had died over the ages by simply being out of a chair or acceleration sling when bad news appeared on scan.
Up A-main corridor and straight into the bridge, a wide, narrow rectangle with rows of seating posts out on either side, and the Captain’s chair in the middle. A few of the officers up and down the bridge aisle glanced at her. Rows of faces in their chairs, pale in the wash of display light, amidst the humming of ventilation and the ever-present rumble and thump of the cylinder rotation. Most were only strapped in loosely, not expecting immediate trouble. Erik looked at his sister. Her hair was pinned up and tied at the back… too long for crew, but acceptable for a spacefaring civvie. She wore a plain spacer jumpsuit with pockets and webbing straps. Life support pouch, medical kit, harness hooks. Standard spacer gear. Regs said anyone not wearing it would be confined to quarters.
“If you’re going to stand there,” Erik told her, “then take hold.” Lisbeth blinked at him. “That’s what we call it — ‘take hold’. It means brace, grab something, never stand unsecured.” Lisbeth took a hold of a display mount. (Combat Marine Major Trace Thakur) took a break from reviewing unit status when her quarters uplink told her Lisbeth had arrived. She entered her room to find the girl carrying the little bag she’d brought on the shuttle, standing between the double bunk, folding wall table and wall closet, and looking a little lost.
“You can have the right closet space here,” said Trace, opening the door and showing her. “You pull out the racks like this, then lay your clothes flat and use the covers to hold them in, so they don’t fly around in manoeuvres or when we cut G. The head’s just up the corridor on the left, it’s unisex but the boys are polite. Or if they aren’t, they’ll hear from me about it.”
“Well we’re running shifts again,” said Trace, with a glance at ship-time on uplink vision. “You know how that works? The bridge has three shifts, the rest of the ship has two. Normally the Captain’s on 0600 to 1400, that’s first shift. Then second-shift is 1400 to 2200, then third-shift. Given all the people we’re missing, I think Erik will cut that to two shifts and put all his best crew on first-shift, so you’re not going to see him much.
“It’s 1510 now so try not to sleep too long — I sleep through third-shift so we’ll do better if we match schedules. But you can come back here any time you like if you need some alone-time — I’m only ever here to sleep or change. You can use a slate to access ship library, you can watch primary-scan if you want, or track status, or else there’s a big selection of entertainment if you want to relax. Just remember, always pull the net across when you sleep, you’ve seen these?”
“I’ve seen them on a vid,” said Lisbeth, as Trace demonstrated how the net pulled across the bed, and secured to the bed rim by steel latches.
“Good, so the release is here.” Pointing to the button. “Emergency life support is the bottom of the main closet, the yellow and black stripes. And most important…” she reached the space between wall table and closet, where a canvas wrapping stood from ceiling to floor. Hit the release and the canvas seals ripped as a couple of acceleration slings hummed into the room on steel runners in floor and ceiling. “These will deploy automatically if bridge sounds the ‘take hold’ — big alarm, flashing lights and announcements, you can’t miss it. When you hear that alarm, get in the sling. Don’t do anything else, just get in like you’ve been shown, and brace. Do not stay in bed — even with the net across, the rear thrust will just put you through the wall, you’re lying perpendicular to thrust and you’ll slide off. If you need any help, use personal coms, but again, if we’re under thrust, no one can actually move to help you. Any questions?”
Thrust correction hit them, unannounced, and suddenly gravity cut in half as the correction pushed the ship ‘down’, then sideways as cylinder rotation took them around. Lisbeth flailed for balance with a squeal, and Trace caught her in a two-armed embrace and fell them both sideways into the closet until it passed.
“Lots of rocks out here,” she explained, pushing them back upright. “Just remember to never stand unsecured.” Lisbeth woke to the sensation that she was falling. Because she was falling, or at least gravity was tossing her out toward the bed netting, and her heart hammered in panic as she grabbed at the net. And then lay there, staring at the bottom of Major Thakur’s bunk above. She wrestled with the unfamiliar uplink network for a moment before finally finding the time. It was 1649, she’d been asleep barely an hour, and didn’t feel very rested. It was hard to rest when your subconscious expected gravity to smack you into the ceiling at any moment. And the net wasn’t much comfort, because gravity really was that changeable out here, just a side-effect phenomenon of distance plus velocity plus occasional shifts in trajectory.
“Attention all hands, this is the LC (Lieutenant Commander).” It was her brother’s voice on the intercom. “Attention all hands, this is the LC. Scan has spotted a nice big rock not too far off our path, it should make a decent hiding spot for us, it appears to have a good metallic signature, should confuse our signal, and isn’t tumbling so we can get real close. To rendezvous with it we’ll need to proceed with a one-G burn for the next two hours and seventeen minutes. We are currently at burn-minus-five minutes, I repeat, at burn-minus-five minutes. All hands prepare for a one-G burn. LC out.”
An alarm sounded, high and wavering up and down, like some mournful animal’s howl, and the room lights began to flash in time. Lisbeth lay where she was, clutching her bednet with her heart thumping in rising panic. Her uplink visual flashed, an incoming call, and she opened it… “Lisbeth?” said Thakur.
“I’m here.” “Okay, all that this means is that the wall opposite the door is about to become the floor. Are you in bed?”
“Yes.” “So, first you disengage the bednet, then you sit on the bed with your back to the wall. Once you’re out, put the bednet back on so the sheets don’t go everywhere. That’s it. You’ll notice that all the thrust-ward walls on the ship have green lines where they join the ceiling.” Lisbeth looked, and sure enough, a green stripe ran from wall to wall. She unhooked the bednet, fingers fumbling on the locks, and let it wind across on its own power. “That’s so you know which way gravity will go when we burn. Always remember which wall has the green stripe — we call it the G-wall.”
As she scrambled to sit on the bed end, Lisbeth recalled a documentary she’d once watched where spacers had called it the ‘K-wall’, because it was the one that killed you. “Okay, I’m sitting with my back to the wall.” And remembered to pull the bednet back across, and climbed on it to hook it in. “Right, as soon as we thrust, the crew cylinder will stop rotating. You wait ten seconds, then the all-clear will sound, and you can move around. Obviously all the things that require cylinder rotation to work, won’t. So the toilets, showers, etcetera. Everything else, well, you’ll discover that spacers learn to improvise. Any questions?”
“No.” Her heart was still pounding, but she felt a little better. “No, I’m fine. Thank you Major.”
At one minute the com started a ten second countdown. At ten seconds the count was for every second. Then a thunder that rumbled through the walls, floor and bed, and a shove from behind. Blankets slid upon the bed, and the groan and squeal of various things shifting weight about the room. It felt as though the room were being tipped upon its end, like some giant had come along, grabbed the nose-end of the ship and pointed it to the sky. Now she was flat on her back. It was the oddest thing, but not quite as scary as she’d imagined. The wall, as Major Thakur had said, was now the floor, and she was lying on her back with her feet up in the air. The ship sounded different, the white noise of cylinder rotation that became so omnipresent that she’d gotten used to it, had now disappeared. In its place was a low, rumbling thunder, and the metallic rattle and squeal of separate parts vibrating against each other.
Lisbeth sat up carefully, and the speakers announced the all-clear. It took a while to convince her brain that this new orientation was not about to violently revert, dropping her face-forward on the once-floor that was now the wall. Her bunk bed was now vertical before her, sheets fallen in a heap within the bednet. Carefully she stood up. If thrust suddenly stopped, she reminded herself, she wouldn’t fall — she’d be weightless. Even that previous ‘normal’ gravity had only been the function of the rotating crew cylinder. Without it, everything floated.
The wall screen above the table was now at her feet. And the table rim, she saw, had a thick edge that now doubled as a seat, as the twin chairs were of course bolted to the ‘floor’, now beside her. She sat on the table rim, and contemplated the door. It was far above her. How odd, the room had seemed tiny when that wall had been the wall. Now that it was the ceiling, the door looked like the mouth of a well she’d fallen into, and was now trapped at the bottom of. And yet the Major had said that once thrust had begun, she’d be free to move around. How the hell? Then she noticed that the rim of the top bunk had rungs on it, like a ladder. She hadn’t noticed that before, and if she had, wouldn’t have guessed why. Now it was obvious.
And what had the Major said? Gain self-knowledge? Start today? If she asked Erik for permission to wander, he’d say no, and she’d be stuck here. And she hated to bother the Major again with her weakling, civilian requests. She was a grown woman, she could go for a walk if she wished. And so she put her hands on the bunk ladder, and climbed.
Atop the bunk, she could reach the door quite easily. The door did not open immediately, and a beeping alarm sounded in the corridor outside. Then it opened, very slowly. When it stopped, Lisbeth grabbed the rim and walked her feet up to the end of the bunk. That got her shoulders out the door, and… “Ware!” came a call as some legs passed her, and jumped the door she’d opened. That had been why the alarm in the corridor — the doors now became trapdoors into which people could fall. She heaved herself up quite easily, and scrambled over the edge. The corridor looked different, floor on one side, ceiling on the other. She followed the spacer who’d passed, and saw her jumping the doors at her feet whether they were open or not. That seemed like a good idea, and Lisbeth copied. Most insystem freighters did not have this problem, of course, as they were designed so that ‘aft’ thrust was the floor, in a vertical stack. Without jump engines, they’d accelerate at 1-G toward their destination, then turn over at halfway and decelerate at 1-G all the way in. Jump engines made it possible to gain or lose enormous velocity instantly, and so most insystem travel for FTL ships was coasting without thrust, with gravity from cylinder rotation only.
The fear returned when she reached the first trunk corridor. It ran a good portion of the crew cylinder from fore to aft, and now as she approached the corner, the once-innocuous passage yawned at her feet with a sheer, endless drop. Traction lines she’d not seen before had appeared, and now ran up and down the shaft, one line heading up, the other down. Spacers rode it up and down, standing on the little footrests, clipped to the rope with their harness. The woman Lisbeth had been following took a little wand from a pocket and extended it to the length of her arm. Then she took her harness clip, unhitched it and mounted it on the extended wand. A fast clip to the upward rope, then it caught on the next empty handhold. The woman stepped off as her harness pulled tight, and swung to the rope, put her feet in, and rode it up.
That simple huh? Lisbeth watched in amazement as someone else got off at her level, and using the wand to clip the harness to another rope line that extended into the corridor from above — that must have also popped out automatically when the thrust kicked in, Lisbeth thought. She hadn’t noticed it before. They didn’t even stop the rope, just hooked, jumped and swung into the corridor mouth like some tree swinging primate.
Lisbeth didn’t particularly want to do that, she was sure she’d miss her level or lose her nerve… or worse, jump without attaching properly, and fall. But she recalled more documentary footage of people getting off when these ropelines touched the bottom. Surely she could manage that?
She searched several pockets and found the wand-thing. Extended it, and found how it attached to the harness hook — she was an engineering graduate after all, she told herself firmly. And she knew how to rock climb and use safety harnesses, there were plenty of engineering tasks that required it. Then she waited until a clear foothold appeared on the down-rope, reached with her clip with hands that only shook a little… waited until the footrests passed and clipped just above them. The clip snapped immediately shut, and her triumph lasted a split second until the descending handholds caught the clip, and she realised her harness was about to yank her over the edge.
She managed not to scream, and jumped. And fell, yanked tight on the harness and swung into the rope, spinning around in dangling confusion, the rope hitting her face and burning her hand as she flailed at it. And grabbed, heart hammering, and scrambled to find the footrest with her feet… and got on. She hung there, gazing about as the corridor walls rose past her…
“Ware!” called a voice from below, and the next person rising past her fended off as her feet nearly kicked him in the head.
“Sorry! I’m sorry!” But he was past and going up, and someone waiting on the next corridor down to get on was looking at her oddly. She’d done it, she realised with elation. Only now the corridor was doglegged forty-five degrees sideways, and the ropeline simply dragged at the corners — she saw someone coming up below having to walk up the wall to get around without banging the corner. Here on the outer side of the dogleg was a big elastic net sticking halfway out into the corridor. To catch falling spacers, she realised.
She pushed around the outer edge, thankful the rope handholds were offset so that descending and ascending spacers wouldn’t hit that corner at the same time, squeezed past another rising, then hit the next dogleg corner with her butt as the corridor straightened out again. That corner was cushioned, and opposing it on the far wall was another big elastic net. So any falling spacer who missed the first net would hit this corner, obviously, and bounce across to land in that net. Theoretically. She wondered how many who did so didn’t survive it. In a 10-G push, a five meter fall was like fifty meters at 1-G. Even a two meter fall would probably crush you like an egg. What was left after a tumble down this corridor at 10-G, she didn’t want to think about. Beyond, the corridor end was approaching. Now this looked simple enough, and she unclipped her harness and simply stepped off as the rope passed its end pulley and went around. There. And looked up the vast height above with a real sense of accomplishment. Now, she thought. Engineering.
Engineering HQ was built with its back to the rear cylinder bulkhead. The main entrance door was now a hole in the floor with a rope ladder on one side, and a rope on the other. “Ware!” someone called as she peered in, and she stepped quickly aside for a spacer in a hurry who sat on the doorframe, grabbed the rope, then slid down at speed. The rope ladder was to come up, Lisbeth guessed. Well, she’d done this before in PT classes. She sat, legs over the edge, took the rope and told herself that this was nothing compared to what she’d just done. Then slid off, and let gravity take her down with the rope on her jacket arm to save her the rope burn.
And looked around as her feet hit the bottom. She was to one side of a bridge not unlike the main bridge, with various scan posts before wide screen arrays. People still sat in those chairs, flat on their backs, and talked back and forth or on coms. Here on the ‘floor’, people who wanted to talk to them stopped and looked up. Getting in and out of those chairs would take a boost, Lisbeth thought. She peered up at one, and saw display screens showing engine schematics, jump line routes, and vid feeds from various drones probing the damage. Those drones would now be burning at 1-G just to keep up.
The woman in the chair looked back at her, her head just a little above Lisbeth’s own. “Hey. Lisbeth Debogande, right?”
Lisbeth nodded. “I’ve got a masters in engineering from Getti College, graduated top of my class. Specialised on a starship track, I was wondering if…”
“Hey Rooke?” the woman said into coms. “You wanted another eye on those jumpline schematics? I’ve got you one.” She pointed, for Lisbeth’s benefit. “That way.”
Centrifuge ship with spin Out Is Down Down is at 90° to spin axis, pointing away from spin axis. The spin axis coincides with thrust axis.
Centrifuge ship with thrust Aft Is Down Down is parallel to thrust axis, in the direction the exhaust is traveling.
Why repairing the centrifuge while under spin is a really bad idea
artwork by Stanley Meltzoff
The Rocket Ship Valkyrie was two hundred and forty-nine days out from Earth-Luna Space Terminal and approaching Mars Terminal on Deimos, outer Martian satellite. William Cole, Chief Communications Officer and relief pilot, was sleeping sweetly when his assistant shook him. ‘Hey! Bill! Wake up — we’re in a jam.’ ‘Huh? Wazzat?’ But he was already reaching for his socks. ‘What’s the trouble, Tom?’
Fifteen minutes later he knew that his junior officer had not exaggerated; he was reporting the facts to the Old Man — the primary piloting radar was out of whack. Tom Sandburg had discovered it during a routine check, made as soon as Mars was inside the maximum range of the radar pilot. The captain had shrugged. ‘Fix it, Mister — and be quick about it. We need it.’ Bill Cole shook his head. ‘There’s nothing wrong with it, Captain — inside. She acts as if the antenna were gone completely.’ ‘That’s impossible. We haven’t even had a meteor alarm.’ ‘Might be anything, Captain. Might be metal fatigue and it just fell off. But we’ve got to replace that antenna. Stop the spin on the ship and I’ll go out and fix it. I can jury-rig a replacement while she loses her spin.’
The Valkyrie was a luxury ship, of her day. She was assembled long before anyone had any idea of how to produce an artificial gravity field. Nevertheless she had pseudogravity for the comfort of her passengers. She spun endlessly around her main axis, like a shell from a rifled gun; the resulting angular acceleration — miscalled ‘centrifugal force’ — kept her passengers firm in their beds, or steady on their feet. The spin was started as soon as her rockets stopped blasting at the beginning of a trip and was stopped only when it was necessary to maneuver into a landing. It was accomplished, not by magic, but by reaction against the contrary spin of a flywheel located on her centerline.
Under spin, the airlocks will be in the floor
The captain looked annoyed. ‘I’ve started to take the spin off, but I can’t wait that long. Jury-rig the astrogational radar for piloting.’ Cole started to explain why the astrogational radar could not be adapted to short-range work, then decided not to try. ‘It can’t be done, sir. It’s a technical impossibility.’ ‘When I was your age I could jury-rig anything! Well, find me an answer, Mister. I can’t take this ship down blind. Not even for the Harriman Medal.’ Bill Cole hesitated for a moment before replying. ‘I’ll have to go out while she’s still got spin on her, Captain, and make the replacement. There isn’t any other way to do it.’ The captain looked away from him, his jaw muscles flexed. ‘Get the replacement ready. Hurry up about it.’
Cole found the captain already at the airlock when he arrived with the gear he needed for the repair. To his surprise the Old Man was suited up. ‘Explain to me what I’m to do,’ he ordered Bill. ‘You’re not going out, sir?’ The captain simply nodded. Bill took a look at his captain’s waist line, or where his waist line used to be. Why, the Old Man must be thirty-five if he was a day! ‘I’m afraid I can’t explain too clearly. I had expected to make the repair myself.’ ‘I’ve never asked a man to do a job I wouldn’t do myself. Explain it to me.’ ‘Excuse me, sir — but can you chin yourself with one hand?’ ‘What’s that got to do with it?’ ‘Well, we’ve got forty-eight passengers, sir, and —‘ ‘Shut up!’
Artwork by Davis Meltzer for The Falling Astronauts by Barry Malzberg
Yes, this has absolutely nothing to do with Ordeal In Space but the painting was appropriate
Sandburg and he, both in space suits, helped the Old Man down the hole after the inner door of the lock was closed and the air exhausted (remember under spin the airlock will be in the floor). The space beyond the lock was a vast, starflecked emptiness. With spin still on the ship, every direction outward was ‘down’, down for millions of uncounted miles. They put a safety line on him, of course — nevertheless it gave him a sinking feeling to see the captain’s head disappear in the bottomless, black hole. The line paid out steadily for several feet, then stopped. When it had been stopped for several minutes, Bill leaned over and touched his helmet against Sandburg’s. ‘Hang on to my feet. I’m going to take a look.’ (apparently these space suits have no radio) He hung head down out the lock and looked around. The captain was stopped, hanging by both hands, nowhere near the antenna fixture. He scrambled back up and reversed himself. ‘I’m going out.’ It was no great trick, he found, to hang by his hands and swing himself along to where the captain was stalled. The Valkyrie was a space-to-space ship, not like the sleek-sided jobs we see around earthports; she was covered with handholds for the convenience of repairmen at the terminals. Once he reached him, it was possible, by grasping the safe steel rung that the captain clung to, to aid him in swinging back to the last one he had quitted. Five minutes later Sandburg was pulling the Old Man up through the hole and Bill was scrambling after him.
He began at once to unbuckle the repair gear from the captain’s suit and transfer it to his own. He lowered himself back down the hole and was on his way before the older man had recovered enough to object, if he still intended to. Swinging out to where the antenna must be replaced was not too hard, though he had all eternity under his toes. The suit impeded him a little — the gloves were clumsy — but he was used to spacesuits. He was a little winded from helping the captain, but he could not stop to think about that. The increased spin bothered him somewhat; the airlock was nearer the axis of spin than was the antenna — he felt heavier as he moved out.
Getting the replacement antenna shipped was another matter. It was neither large nor heavy, but he found it impossible to fasten it into place. He needed one hand to cling by, one to hold the antenna, and one to handle the wrench. That left him shy one hand, no matter how he tried it. Finally he jerked his safety line to signal Sandburg for more slack. Then he unshackled it from his waist, working with one hand, passed the end twice through a handhold and knotted it; he left about six feet of it hanging free. The shackle on the free end he fastened to another handhold. The result was a loop, a bight, an improvised bosun’s chair, which would support his weight while he man-handled the antenna into place. The job went fairly quickly then.
He was almost through. There remained one bolt to fasten on the far side, away from where he swung. The antenna was already secured at two points and its circuit connection made. He decided he could manage it with one hand. He left his perch and swung over, monkey fashion. The wrench slipped as he finished tightening the bolt; it slipped from his grasp, fell free. He watched it go, out and out and out, down and down and down, until it was so small he could no longer see it. It made him dizzy to watch it, bright in the sunlight against the deep black of space. He had been too busy to look down, up to now. He shivered. ‘Good thing I was through with it,’ he said. ‘It would be a long walk to fetch it.’ He started to make his way back. He found that he could not. He had swung past the antenna to reach his present position, using a grip on his safety-line swing to give him a few inches more reach. Now the loop of line hung quietly, just out of reach. There was no way to reverse the process.
He had swung past the antenna to reach his present position, using a grip on his safety-line swing (bight) to give him a few inches more reach
3D model of astronaut by Juan Ignacio. Posing, render, and diagram by Winchell Chung (me)
Now the loop of line hung quietly, just out of reach. There was no way to reverse the process
He hung by both hands and told himself not to get panicky — he must think his way out. Around the other side? No, the steel skin of the Valkyrie was smooth there — no handhold for more than six feet. Even if he were not tired — and he had to admit that he was, tired and getting a little cold — even if he were fresh, it was an impossible swing for anyone not a chimpanzee. He looked down — and regretted it. There was nothing below him but stars, down and down, endlessly. Stars, swinging past as the ship spun with him, emptiness of all time and blackness and cold. He found himself trying to hoist himself bodily onto the single narrow rung he clung to, trying to reach it with his toes. It was a futile, strength-wasting excess. He quieted his panic sufficiently to stop it, then hung limp. It was easier if he kept his eyes closed. But after a while he always had to open them and look. The Big Dipper would swing past and then, presently, Orion. He tried to compute the passing minutes in terms of the number of rotations the ship made, but his mind would not work clearly, and, after a while, he would have to shut his eyes. His hands were becoming stiff — and cold. He tried to rest them by hanging by one hand at a time. He let go with his left hand, felt pins-and-needles course through it, and beat it against his side. Presently it seemed time to spell his right hand. He could no longer reach up to the rung with his left hand. He did not have the power left in him to make the extra pull; he was fully extended and could not shorten himself enough to get his left hand up. He could no longer feel his right hand at all. He could see it slip. It was slipping — The sudden release in tension let him know that he was falling falling. The ship dropped away from him.
He came to with the captain bending over him. ‘Just keep quiet, Bill.’ ‘Where —,’ ‘Take it easy. The patrol from Deimos was already close by when you let go. They tracked you on the ‘scope, matched orbits with you, and picked you up. First time in history, I guess. Now keep quiet. You’re a sick man — you hung there more than two hours, Bill.’
(ed note: unfortunately Bill has to resign, since he has contracted a bad case of pathological basophobia and agoraphobia. Luckily he is eventually rescued by a cat.)
Variable gravity adjustable toilet, artwork by master artist William Black. Click for larger image
First Men to the Moon
This design is from a book called First Men to the Moon (1958) written by a certain Wernher von Braun, aka "The Father of Rocket Science" and the first director of NASA. The book came out shortly after the Sputnik Crisis.
Their solution to the "which way is down?" problem is to put the crew's seats on tracks. The track was shaped like a letter "L", with one track at 90° to the ship's tail (thrust axis) and the other at 90° to the ship's belly. While landing on its belly the seat would be on the belly track. While being a tail lander on the lunar surface, the seat would be on the tail track. During lift off for some odd reason the seat would be on the tail track but tilted back at 45°.
During lift-off and trans-Lunar injection stages one and two have all their fuel burn and the stages are discarded. Part of stage three's fuel is burnt to finalize injection. The rest of stage three's fuel is expended to decelerate and do a tail-landing on Luna. Stage four lifts off from Luna and stage five aerobrakes and lands on its belly much like the Space Shuttle. Artwork by Fred Freeman
The red girder is the track/support beam that the seat swiveled trolley runs on. Seats are in the "aircraft" configuration, on the belly section of track. Artwork by Fred Freeman. Click for larger image
The red girder is the track/support beam that the seat swiveled trolley runs on. Seats are in the "sitting on its tail" configuration, on the tail section of track. In "aircraft" configuration, the windows at upper right are overhead. Artwork by Fred Freeman. Click for larger image
Seats are in the "lift-off" configuration, on the tail section of track but tilted at a 45° angle. Artwork by Fred Freeman. Click for larger image
The red girder is the track/support beam that the seat swiveled trolley runs on. Seats are in the "aircraft" configuration, on the belly section of track. Artwork by Fred Freeman. Click for larger image
Space Angel
In Space Angel (1962), illustrated by the legendary Alex Toth, the pilot's chair and attached controls rotate on gimbals independently of the ship. Of course there is no need to rotate the chair on gimbals since the Star Duster never ever lands on its belly like an aircraft, but the unsophisticated audience demands it.
R/P FLIP
The Scripps Institution of Oceanography's FLIP ship does things the brute force way. Notice the two sinks at ninety degrees to each other. It features doors in the floor, portholes in the ceiling, tables bolted sideways to walls, and stairs leading to nowhere.
BIS Lunar Spaceship
Below is a crude but clever arrangement. Under thrust, "down" is in the direction of the red arrows and the green chairs feel like they are prone. When thrust is off, the ship is spun on its long axis for centrifugal gravity so "down" becomes in the direction of the yellow arrows. The green chairs abruptly feel like they are upright, and the crew can walk on the blue "floor". In other words, they deal with the problem by making the layout usable under either orientation. Due to the small diameter of the spacecraft, it will have to spin exceedingly fast to produce appreciable gravity.
But there is one tiny little drawback. You see, there is a reason that wheel space stations are shaped like, well, wheels and not like hexagons.
The amount of centrifugal gravity experienced is determined by the distance from the axis of rotation (the greater the distance, the stronger the gravity). So if you want the amount of gravity to be the same in all parts of the wheel, the station has to be a circle. That is the only shape where the all parts of the rim are the same distance from the axis.
The point is, with a hexagon, different parts of the rim are at different distaces from the axis, and so have different gravities.
Now, look at the first image below. The segment labeled "SPACE STATION RIGID MODULE" is one of the hexagonal sides. The green lines lead to the axis of rotation (i.e., that is the direction of "up". Note the little dark men figures, they feel like they are standing upright). And the red lines are lines of equal gravity. You will note that they do not align with the module.
In the module, centrifugal gravity will be weakest at the center of the module, and strongest at the ends where it joins with the neighbor modules (i.e., the longer the green line, the more intense the gravity). Even though the module is straight, the gravity will feel like it is a hill. If you place a marble on the deck in the center, it will roll "downhill" to one of the edges.
As you see, the designers tried to compensate for this by angling the decks, but it really doesn't work very well.
Rotation rate 3 rpm
Gravity values are for the extreme rim
Notice that none of these values are for the extreme rim
For Self-Deploying Space Station 1.0 = 19.8 meters and rotation rate 3 rpm.
1.00 = 0.200g
1.03 = 0.206g
1.07 = 0.214g
1.10 = 0.220g
I was curious as to how much of a problem this actually was. After doing some trigonometry (with no help from my parents) my questionable results are that for a hexagonal station, the gravity will vary between 100% and 113%. This is only about ten percent, which is annoying but probably not a show-stopper.
At point A gravity is at 100%, whatever the station is spun up for.
Point B is 15 degrees counter-clockwise from A, so in right triangle ABX if adjacent side (line AX) is of length 1.00, then the hypotenuse (line BX or distance from the spin axis) is 2.00 - cosine 15° or 1.03. Therefore gravity is 103%(because according to the equation the gravitational acceleration is proportional to the distance from the spin axis).
Point C is 30 degrees counter-clockwise. This hypotenuse is 1.13 so the gravity is 113%
Again this is only a difference of 13%, but things dropped on the floor are going to accumulate at the station hexagon vertices as they roll downhill.
I found some more details in a report Self Erecting Manned Space Laboratory (page 146) by R. Berglund and E. Weber (1962). They went through several options before settling on the above design.
They start off by noting that [a] spin grav space stations need a sizable spin radius or the astronauts are constantly vomiting, and [b] such a radius precludes launching the station assembled in its final form. The images below are never going to come to pass, the report says "However, it is obvious that a vehicle with sufficiently large diameter to permit a moderate level of artificial gravity to be simulated with a low rotational velocity is not capable of being boosted into orbit in one piece because of geometric factors.".
Nope.
Nope. Ain't gonna happen like that.
So you are going to have to launch the station not in its final form.
The classic idea was to just launch into orbit girders, plates, welding units, and astronaut construction workers. They would build the station in orbit. This was dismissed as impractical, inefficient, and downright dangerous for the astronauts. And dangerous for NASA, it won't take many astronaut deaths to shut NASA down entirely.
So the next concept is to launch into orbit modular space station bits. This will drastically cut down the construction time, and reduce the danger to the astronauts. Now the problem is trying to find the sweet spot for the module size. The advantage of larger modules is you will shorten construction time since fewer units will be needed to assemble the station. The disadvantage is if they are too large and/or too irregular in shape, the booster cannot transport them into orbit.
But then some brilliant engineer wondered if you could avoid the requirement for constructing the station at all. What if you could deflate the station and inflate it in orbit, or fold it up into something smaller that will fit the booster but unfold like a flower in orbit? This would allow zero construction astronaut danger. You would have a self-erecting space station.
The problem with inflatable space station is [a] equipment cannot be installed prior to launch since the equipment does not deflate, and [b] over long durations meteors will pop the station like a balloon. I will note parenthetically that the second problem is not really a problem. Bigelow Aerospace is developing inflatable space stations in a big way, and flexible walls are actually more resistant to meteorite punctures than rigid walls. Particularly if the flexible walls are made out of bullet-proof Kevlar. Their B330 module has been on the International Space Station since 2016 with nary a leak. But I digress.
The report is about a design by the Langley Research Center which uses both inflatable and foldable concepts to make a hybrid with the best of both. It has six rigid cylindrical sections with equipment already installed, with each section joined by inflatable sections. When folded up it will fit into the payload faring of a Saturn C-5 booster. Once in orbit, it can unfold all by itself with no need for any construction astronauts.
Note the deflated crumpled segments connecting the rigid cylindrical segments. The radial access tunnels connecting the ring to the hub are also deflatable.
Launch configuration
Then there is the problem of the station shape.
The ideal shape is a circle. Sadly this is harder to manufacture, and it is certainly makes it far more difficult to launch. See figure 6, on the right side. It really makes the booster rocket's payload faring bulge out, and creates an aerodynamic buffet during launch.
The less ideal shape is a polygon centrifuge. As shown in the above diagram (and earlier in this section), the amount of gravity is variable and the floor feels like it is inclined. The report suggests using the stepped floor solution as mentioned earlier. Because as figure 9 shows the folded polygon centrifuge is a heck of a lot easier to launch.
The report decide to go with the polygon centrifuge.
The station will have mechanical actuators at each hinge. These will carefully unfold the station into its final form. Note that the hub is rather large. If you look at the right side of figure 9 you will see this is because the hub is at the bottom and has to carry the load of all the other components sitting on top of it.
The station will have a huge internal volume of about 1,700 cubic meters. Which means it can house much more than the original planned 6 person crew. It could easily hold 27 crew, but 21 was set as nominal due to duties and work load in the laboratories. With an expanded crew, a single docking port is not enough. In case of emergency the entire crew will have to be evacuated. Since a single Apollo command module can only hold three crew, the hub will need seven docking ports for seven command modules, so that 21 crew can be evaculated.
The centrifuge is always spinning. The hub is de-spun so as to be stationary while a command module docks/undocks. When astronauts in the hub wish to enter the centrifuge, or vice versa, the hub is spun to match the centrifgue and the hub transfer airlock mates with one of the centrifuge's radial arm tunnels.
As more command modules dock, they will have to be held in a radially symmetric pattern, or the blasted hub will make the entire station wobble when the hub is spun up.
Hub airlock mates with centrifuge radial arm, when the hub is spun up to same rate as centrifuge
Polygon Alternative
click for larger image
I found another design for a self-erecting spin gravity station that avoids the weird gravity of the polygon station. A self-erecting tumbling pigeon, as it were.
The example in the diagram above uses the same module dimensions as the polygon station above: 22.9 meters long by 3 meter in diameter. Seven modules, including the one in the center used as a hub. Hanging off the hub are two arms, each with three modules. In each arm, one module is just a truss, the two on the end are pressurized habitat modules. The entire thing is tied together with tethers.
Advantages:
Centrifugal gravity does not vary appreciable across each floor.
No "stepped" floor required.
100% usable floor space, since floors are perpendicular to long axis instead of parallel like the polygon station.
Disadvantage is that the centrifugal gravity varies between floors. But that is common with many designs. At 3RPMs, the bottom floor (47.9 meters from spin axis) will have 0.48 g, 0.25 g at the top (25.0 meters from spin axis), and a Mars-like 0.37 g in the middle (36.5 meters from spin axis). Centrifugal gravity is reduced by 0.025 g for each 2.5 meters closer to the spin axis.
The truss sections will have low but not zero gee, and can be used to store equipment and life support.
Unexpected Spin
If a spacecraft (with spin gravity or not) was slammed by a foreign object hard enough to start the spacecraft tumbling, this will generate unexpected spin gravity. This is pretty much guaranteed to create an emergency situation inside the ship.
This is highly unlikely to occur naturally.
But when Zane Mankowski started working with his simulation game, he discovered that this was rather common when low mass combat spacecraft were struck.
LIFE IN THE LONELY VOID
Another consideration mentioned a few times in previous posts is that crew modules are put close to the center of mass in case of fast rotations. Spinning a multi-kiloton spacecraft around fast enough to produce 9 g’s or more, enough to cause fatal damage to the crew, is rare, but it does happen in game. Keeping the crew near the center of mass reduces the centripetal acceleration on the crew in such cases.
It is very difficult to knock a multi-kiloton spacecraft into a fast spin, and if you have enough firepower to do so, you generally don’t need to slush the crew in this manner.
On the other hand, for smaller spacecraft, under a kiloton fast attack spacecraft, knocking them into a tailspin is actually rather common. To exacerbate this, small spacecraft with enormous projectile weapons can often knock themselves into unpleasant spins through recoil alone. As such, keeping the crew near the center of mass is most important on smaller spacecraft.
DEPENDENT CENTRIFUGE
Spacecraft spins as a single unit
Spin axis parallel to long axis
Spin gravity at 90° to thrust gravity
DEPENDENT CENTRIFUGE: TUMBLING PIGEON
Spacecraft spins as a single unit
Spin axis at 90° to long axis
Spin gravity at 180° to thrust gravity
INDEPENDENT CENTRIFUGE: HAB ONLY
Centrifuge spins independently of spacecraft
Spin axis usually parallel to long axis
Spin gravity at 90° to thrust gravity
INDEPENDENT CENTRIFUGE: HAB + POWER
Habitat - reactor centrifuge spins, engines are stationary
This avoids angular momentum precession problem when aligning thrust axis
FIRE BATON
Mars Crew Transfer Vehicle Artificial Gravity
The entire point behind this study was to discover the optimum way to give artificial gravity to an ion-drive spacecraft. Prolonged microgravity missions do horrible things to the health of the crew. Mars missions tend to have over-long wait times to start with. Limiting Mars missions to the ones with the shortest duration drastically reduces the available mission trajectories in a given decade. Ion and other electric powered drives only exacerbate the problem with their absurdly low accelerations. This particular design is going to take three extra months just to accelerate up to Terra's escape velocity (chemical and nuclear thermal propulsion reaches escape velocity in a matter of minutes). That is long enough for the crew to lose 4.5% of their bone mass.
The problem is that the standard artificial gravity architectures have problems on a spacecraft that uses rockets for propulsion. And these problems are also exacerbated by low-acceleration drives.
Each of the mission's maneuvers contains a specifed Axis of Acceleration. To perform the maneuver the spacecraft's thrust axis has to be exactly on the axis of acceleration. Before the maneuver the spacecraft has to be rotated so the thrust axis is in the proper orientation, and during the burn the thrust axis must be monitored and corrected if it drifts off the specified acceleration axis.
The problem is that the spacecraft's spin-gravity section acts like a gargantuan momentum wheel. This gyrostabilizes the ship and will fight your attempts at TVC tooth and nail. This is referred to as the Rotational Angular Momentum problem.
FIRE BATON
OX CART
BEANIE CAP
Spin Gravity Concepts
Concept
Features
Advantages
Disadvantages
Example
FIRE BATON
In spin section (entire ship) the habitat is counterweighted by the reactor and power conversion system
The entire ship rotates as a unit, there are no segments without rotation.
The majority of TVC is by pointing the entire vehicle
No rotating problematic joints, megawatt power connections or fluid piping
Power conversion can take advantage of operating in a gravity field
The vehicle angular momentum must be continuously vectored during TVC in order to deal with the rotational angular momentum problem.
Heat radiators have to be designed to operate in a gravity field.
It is challenging to design methods for crew ingress, crew egress, and ship docking to a spinning object.
Mars NEP with Artificial Gravity (this section)
OX CART
In spin section (everything but engine modules) the habitat is counterweighted by the reactor and power conversion system
Thrusters are de-spun and gimbaled for TVC
TVC is decoupled from rotational angular momentum, thus avoiding the rotational angular momentum problem.
Power conversion can take advantage of operating in a gravity field
Design is faced with the daunting problem of transferring megawatts of electricity and kilograms of propellant across a rotating joint. For months.
Potential cyclical loading of rotating joints can shatter them.
Heat radiators have to be designed to operate in a gravity field.
It is challenging to design methods for crew ingress, crew egress, and ship docking to a spinning object.
The problem can be avoided by de-spinning the spin-grav section of the ship for the duration of the thrust. Sadly, since the thrust is more or less on for the entire trip, this kind of defeats the point of giving the ship spin-grav in the first place.
Ox Cart and Beanie Cap avoid the rotational angular momentum problem by de-spinning the engines from the spin gravity sections of the ship. The spin plane is aligned with the interplanetary trajectory plane. The main draw-back is the engineering and maintenance nightmare of the rotation joints.
Fire Baton is trying a new approach. The entire ship spins in order to avoid those nasty rotation joints. Instead it tries to precess the entire ship in order to aim the thrusters for TVC.
To lock a spacecraft or other object solid with gyrostabilization you actually need three spinning gyros at 90° angles to each other. A spin-grav ship only has one spinning object. So instead of being locked in place, if you push on it the spinning thing will undergo precession. Which is a fancy word meaning the object rotates unexpectedly at a right angle to the direction you push it. Try playing with a spinning gyroscope and you'll quickly discover this.
The report did an analysis and discovered that thrust vector adjustments came in two classes: very slow rates and moderate rates. The very slow rates were changing the vector less than two degrees per day (during the heliocentric trajectory). The moderate rates were changing the vector fifteen degress per day (during Terra departure and during midcourse thrust reversals). This means that two different steering strategies can be used. For flipping the main engines to point the opposite direction (for braking) a third strategy can be used.
In both strategies, the mechanism is to thrust in a direction at right angles to the desired steering direction, to precess the thrust axis in the desired direction (see "resulting precessional yaw rate" in diagram above). The thrust has to be done intermittently, when the thruster is pointed in the correct direction by the ship's spin (see "thrusting arc" in diagram above). If the thrust is appled every 180° of a spin-grav rotation, very slow rates require 3 Newtons and moderate rates require 15 Newtons.
differentially throttling the main ion thrusters (the two banks are throttled in an unbalanced manner)
firing tangential RCS to spin the ship 180° on its long axis
The report tried all the combinations, and concluded that the lowest propellant consumption was if:
Very slow rates precession (∼2°/day, 3 n) was performed with differentially throttling the ions engines ±5%
Moderate rates presession (15°/day, 15 n) was done with the RCS
Spinning 180° on the long axis was performed with tangential RCS
Over the entire mission the report calculates these strategies will require approximately one extra metric ton of propellant (1,074 kg). And no nasty rotation joint needed.
DEPENDENT CENTRIFUGE
Spacecraft spins as a single unit
Spin axis parallel to long axis
Spin gravity at 90° to thrust gravity
DEPENDENT CENTRIFUGE 1
The landing boat overtook Discovery from below and behind, giving Drake a good look at his ship. The battle cruiser consisted of a torpedo-like central cylinder surrounded by a ring structure. The central cylinder housed the ship’s mass converter, photon drive, and jump engines — the latter needing only an up-to-date jump program to once more hurl the ship into the interstellar spacelanes. In addition, within the cylinder were fuel tanks filled with deuterium and tritium enriched cryogen; the heavy antimatter projectors that were Discovery’s main armament; and the ancillary equipment that provided power to the ship’s outer ring.
The surrounding ring was supported off the cylinder by twelve hollow spokes — six forward and six aft. It contained crew quarters, communications, sensors, secondary weapons pods, cargo spaces, and the hangar bay in which auxiliary craft were housed.
Drake listened to the communications between the landing boat and the cruiser all through the approach. As they drew close, he noticed the actinic light of the ship’s attitude jets firing around the periphery of the habitat ring. When in parking orbit, the cruiser was spun about its axis to provide half a standard gravity on the outermost crew deck. The purpose of the attitude jets was to halt the rotation in preparation for taking the landing boat aboard.
There is a common belief among the uninitiated that a spaceship’s control room is located somewhere near the ship’s bow. In truth, that is almost never the case. Discovery, with its cylinder-and-ring design, was particularly unsuited to such an arrangement. Like most warships, the cruiser’s control room was located in the safest place the designers could find to put it — at the midpoint of the inside curve of the habitat ring.
Actually, Discovery possessed three control rooms, each capable of flying or fighting the ship alone should the need arise. For normal operations, however, there was a traditional division of labor between the three nerve centers. Control Room No. 1 performed the usual functions of a spacecraft’s bridge (flight control, communications, and astrogation); No. 2 was devoted to control of weapons and sensors; and No. 3 was used by the engineering department to monitor the overall health of the ship and its power-and-drive system.
An hour later, the ship was accelerating along a normal departure orbit at one standard gravity while crewmen rushed to convert compartments from the “out is down” orientation of parking orbit, to the “aft is down” of powered boost. The only compartments that did not need conversion were the control rooms (which were gimbaled to automatically keep the deck horizontal) and the larger compartments (hangar bay, engine room), which had been designed to allow access regardless of the direction of “down.”
Their destination was Alexandria’s main ballroom. Situated on the outermost level (where gravity was highest), the ballroom was large enough for the deck underfoot to show a perceptible curve. In order to use the large compartment, however, it was necessary that ship’s spin provide the pseudo-gravity. During powered flight, when gravity was ‘aft’ rather than ‘out’, the compartment was a deep arc-shaped well of limited utility. Since no spaceship can afford to waste that much space, the architects who designed the liner had installed four levels of retractable decks. Once extended from their recesses in the walls, they turned the oversize compartment into a series of smaller spaces.
Hedrick Fusion Spacecraft
Centrifuge is on the right, using "mass elevators" as the spokes for spin balance. 80 m diameter centrifuge rotating at 4.2 rpm to provide 0.8 g. Mass elevator spokes have movable masses used to balance the centrifuge as the crew moves around. The centrifuge is composed of 36 habitat modules, each 4 meters in diameter and 7.3 meters long.
Tumbling Pigeon
DEPENDENT CENTRIFUGE: TUMBLING PIGEON
Spacecraft spins as a single unit
Spin axis at 90° to long axis
Spin gravity at 180° to thrust gravity
In Heinlein's The Rolling Stones, some spacecraft are classified as "tumbling pigeons". They rotate end over end to provide artificial gravity (i.e., they spin on the short axis instead of the long axis). The more modern term is "baton" mode, referring to baton twirling.
The idea is to increase Cl. If you do a conventional spin on the long axis then Cl is the relatively tiny width of the ship, leading to either pathetically low gravity or the crew constantly vomiting due to spin nausea.
But if you use the clever Tumbling Pigeon method, you spin on the short axis and Cl is the entire freaking length of the ship. Then you can easily have a high spin gravity with no spin nausea.
Rocket with thrust Aft Is Down Down is parallel to thrust axis, in the direction the exhaust is traveling.
Tumbling Pigeon spinning Out Is Down Down is at 90° to spin axis, pointing away from spin axis. Hab module gravity is inverted!
There is a drawback, of course. If the crew spaces are located in the "top" of the ship and the engines are in the "bottom", you have a problem. When you enter tumbling pigeon mode, the directions of "up" and "down" in the crew spaces will reverse. The floor will become the ceiling, with all the problems that entails.
Waterskiing with thrust Aft Is Down Down is parallel to thrust axis, in the direction of vector sum of exhaust.
Waterskiing spinning Out Is Down Down is at 90° to spin axis, pointing away from spin axis. Hab module gravity unchanged
Exception: Michael Hutson points out that Waterskiing spacecraft are immune to the problem. The orientation of "up" and "down" in the crew compartment stays the same, because the crew compartment is in the "bottom" of the ship.
There were a couple of real-world designs usings the tumbling pigeon technique (e.g., Mars NEP with Artificial Gravity and Stuhlinger Ion Rocket). In the designs a dependent centrifuge would not provide a long enough Cl unless the habitats were put on long radial arms. This increases the structural mass and cuts into the payload mass. By using the tumbling pigeon arrangement, the ship's spine does double duty as framework and as radial arms. No extra structural mass needed.
Nuclear engine to the left, habitat module to the right. Note how center of rotation is off-center. This is because the engine is so dense (as is the lead shadow shield) and the propellant tanks are not dense at all. This is an advantage since it increases the effective Cl on the habitat module.
Lifesystem of Mars exploration vehicle designed by General Atomic for NASA, 1963. Note storm cellar. Spacecraft uses the "tumbling pigeon" method of centrifugal artificial gravity, which is why the decks are so weird.
Martin Marietta Study
A variety of Artificial gravity (AG) / Mars transfer vehicle (MTV) concepts were developed by the Martin Marietta Astronautics Group for NASA’s Mars
Exploration Case Studies in 1988 – 89. Each of these concepts used a large diameter (~39 – 46 m) aerobrake
(AB) with a low lift to drag (L/D) ratio of ~0.2 for Mars orbit capture (MOC). These large ABs required assembly in
LEO before being outfitted with habitation, auxiliary PVA power and chemical propulsion system elements within
their protective envelope. By rotating the AB about its central axis at different spin rates and mounting the habitat
modules near the outer perimeter of the AB to increase the rotation radius, a range of centrifugal forces can be
generated for the crew during the transit out to Mars and back. A sampling of these AB concepts (minus their
multiple expendable trans-Mars injection (TMI) stages) is shown in Fig 1.
Fig 1.
Concept 1 was developed for a large crew of 12 – 18 astronauts. It carried eight cylindrical Space Station Freedom
(SSF)-type habitation modules arranged in a ring to provide a 100-m long circular jogging track. The modules were
mounted to a large 45.6-m diameter AB sized for aerocapture at both Mars and again at Earth for spacecraft
recovery and possible reuse. This very large spacecraft had an initial mass in low Earth orbit (IMLEO) > 1500 metric tons (1 t = 1000 kg).
Concept 2 carried 8 astronauts and used four SSF habitat modules arranged in a “Bent-I” configuration inside a 41-m
diameter AB. Two pressurized tunnels connected the four habitat modules to a central logistics and docking hub to
which the Mars Descent / Ascent Vehicle (MDAV) was attached. The IMLEO for Concept 2 was ~1091 t.
Concept 3 utilized a deployable flexible fabric AB (~39-m in diameter) and carried two cylindrical hab modules each with
five separate floors arranged perpendicular to the modules’ long axis. The modules were attached to the central
logistics and docking hub using swivel joints allowing them to swing outward to increase their rotation radius during
AG operation. The modules were cranked back inside the protective envelope of the AB prior to MOC. The modules
housed 5 - 7 crew and the total mission IMLEO was ~687 t including the four expendable TMI stages.
Concepts 4 and 5 used dual retractable tethers to separate paired or individual hab modules from the AB and primary propulsion
system. With tether lengths of approximately several hundred meters, rotations rates as low as 2 revolutions per
minute (rpm) could provide ~1-g of centrifugal acceleration for the crew.
Each of the above concepts had a number of drawbacks. Concepts 1 and 2 were very large, required
significant orbital assembly for the AB and overall vehicle, and had large IMLEO requirements (>1000 t). Concept
3 required an internal arrangement for the hab modules that differed from that of the SSF habitation modules used in
the other designs. It also required movement of two major pressurized mechanical joints. With tethered Concepts 4
and 5, the reaction control system (RCS) propellant requirements to initiate and stop vehicle rotation were larger,
and the dynamic control problems more severe during the deployment and retraction process, as well as during
vehicle spin up and spin down. A tether break or reel freeze-up could also be a critical failure mode. From an
operational standpoint, once deployed, the crew in Concept 4 would be isolated from the systems enclosed within
the aerobrake (e.g., MDAV) and in Concept 5, isolated from each other as well.
Fig 2. Key Features and Components of the Concept 6 AG/MTV
To avoid the deficiencies of the above concepts, Martin Marietta proposed Concept 6, an AG/MTV design
that used chemical propulsion and carried twin cylindrical SSF habitation modules whose long axes were oriented
perpendicular to the longitudinal spin axis of the MTV – referred to as the Dumbbell B configuration (Fig. 2). The
hab modules were connected to a central logistics and docking hub by two pressurized tunnels each ~12.5 m long.
Each hab module – designed to accommodate 2 - 3 crewmembers – had excess capacity so that either could serve as
a safe haven for the entire crew in case of an emergency. Attached to the Sun-facing side of each tunnel and hab
module were ~30 m2 and 75 m2, respectively, of PVAs producing ~26 kWe of electrical power for the spacecraft’s
various systems. Once fully assembled, the rotation radius from the center of the logistics module to the floor of
each hab module was ~17 m allowing centrifugal acceleration levels ranging from 0.38-g to 0.68-g for vehicle spin
rates of 4.5 to 6 rpm. At a slightly higher spin rate of 7.25 rpm, 1-g could be achieved. The pressurized logistics hub
also provided a shirt-sleeve environment and anytime crew access to the MDAV docked to the front of the vehicle.
Fig 5. Options for Habitat Module Orientation and Associated Human Factors
Note gray lines indicating decks within the module
General Design Principles
Hab Modules should have their major dimension / traffic pattern parallel to the vehicle's spin axis
Radial traffic flow should be minimized
Orient command / work station displays vertically to minimize left-right head rotations — lateral axis through ears should be parallel to spin axis
Orient sleeping bunks parallel to spin axis
Minimize visual stimuli (windowless crew cabins)
Radial Orientation
Multi-level vertical design
Large gravity gradient
Ladders between levels
Tangential and Transverse Coriolis effects
Potentially simpler payload (PL) & SC design Earth Orbit Rendezvous and Dock (EOR&D)
Axial Orientation
Uni- or bi-level horizontal layout design
Minimal gravity gradient
Long transfer tunnel to central connecting hub
Minimal Coriolis effects
More complex PL & SC design (on-orbit assembly)
Tangential Orientation
Uni- or bi-level horizontal layout design
Minimal gravity gradient
Long transfer tunnel to central connecting hub
Coriolis effects
More complex PL & SC design (on-orbit assembly)
In designing an AG spacecraft, a number of important human factors must be taken into account in
selecting the rotation radius, angular velocity, and g-levels. These factors include the gravity gradient effect, Coriolis forces and cross-coupled acceleration effects. These human factor effects also come into play when considering the
orientation of the habitat module or modules (shown in Fig. 5) relative to the spin axis of the vehicle. Orientation
options include:
Radial (used by Concept 3, the von Braun and Copernicus-B)
Tangential (used in Concepts
1, 2, 6 and the A. C. Clark) – also referred to as the Dumbbell B configuration
Axial (used in Concepts 4, 5,
and a variant of the A. C. Clark) – referred to as the Dumbbell A configuration
The radial habitat module is by
definition a multi-level vertical design. Because the centrifugal acceleration varies directly with the radial distance
from the center of rotation, a vertical gravity gradient will exist between the different levels of the hab module(s)
and even along the human body itself. Crewmembers climbing “up” a radial-oriented ladder toward the vehicle’s
center of rotation would lose weight with each step. Awkward materials handling problems and uneven g-loadings
on the body are also possible but are not expected to be significant on AG vehicles with reasonable rotation radii.
Tangential Coriolis forces will also expose the crew to pseudo weight changes depending on their direction of
motion with respect to the spin axis of the vehicle. While no Coriolis force occurs when walking parallel to the spin
axis, astronauts will feel heavier when moving in the direction of vehicle rotation and lighter when walking in the
reverse direction. Transverse Coriolis forces will be experienced by astronauts moving vertically between habitat
levels. When climbing “up” toward the vehicle’s center of rotation, the astronauts will be pushed sideways in the
direction of spacecraft spin. A sideways push away from the spin direction will be felt when climbing “down” the
ladder (refer to Fig. 6).
Lastly, cross-coupled angular acceleration effects will be experienced by astronauts early on due to head
movement in the directions transverse to the axis of rotation and the primary direction of spacecraft flight. With time
and use of distinctive interior color schemes or wall-mounted designations to help identify spin direction (depicted
in Fig. 6), astronauts should be able to compensate for and acclimate to these AG effects. General design principles
for habitats onboard rotating AG spacecraft were provided by Loret and are summarized in Fig. 5.
Figure 6. Posted Visual Cues Show Direction of Transverse Coriolis Forces When Climbing Between Levels
Detail
Despite the lack of current experimental data needed to establish accepted g-threshold requirements and
other operational characteristics (e.g., rotation radius and ω), previous experts in this area used existing
physiological and/or human factors data coupled with reasonable assumptions to identify representative operational
regions for AG vehicles. Stone and Thompson recommended a rotation radius ≥ 14.6 m and a spin rate ≤ 6
rpm, while Shipov thought that the minimum radius should be ~20 m.
During the 1960’s, researchers at the Naval Medical Research Laboratory in Pensacola, Florida used their
Slow Rotating Room (SRR) to study the acute rotation effects phenomena at rates as high as 10 rpm. Their results
indicated that a judicious restriction of head motions and progressive adaptation through stepwise increases in spin
rate (1 rpm every 2 days during 16 days of rotation) allowed most human subjects to adjust quickly to avoid the
adverse physical symptoms of higher rotation rates. “Later studies have expanded on the experience from that time
and demonstrated that complete adaptation to rotation rates as high as 10 rpm can be achieved within minutes if
repeated voluntary movements are made. Such movements were avoided in the early Pensacola studies.”
There are some ship designs where the ship separates into two sections connected by cables and spun, in a desperate attempt to increase Cl. Please note that such a spacecraft is "spinning like a bola," not "spinning like a bolo."
Basically it is a tumbling pigeon with cables in the middle instead of spacecraft spine.
A "spinning bola" design. Robert Willey is a pseudonym for rocket scientist Dr. Willey Ley
From The Dream Machines by Ron Miller. Note how it separates and spins like a bola for artificial gravity.
Note cute little cage elevator running on the connecting tethers
Expedition spacecraft uses the spent upper stage as a counterweight
Independent Centrifuge
INDEPENDENT CENTRIFUGE: HAB ONLY
Centrifuge spins independently of spacecraft
Spin axis usually parallel to long axis
Spin gravity at 90° to thrust gravity
INDEPENDENT CENTRIFUGE: HAB + POWER
Habitat - reactor centrifuge spins, engines are stationary
This avoids angular momentum precession problem when aligning thrust axis
A pencil stuck through a doughnut. Artwork by Frank Tinsley (1960). Click for larger image.
An independent centrifuge is where only part of the ship is spun for gravity while the rest stays stationary. As opposed to dependent centrifuges where the entire ships spins.
Usually it takes the form of a large spinning ring with its axis coincident with the thrust axis (i.e., it looks like a pencil stuck through a doughnut). But there are some types where the centrifuge is internal, e.g., the Discovery from 2001.
INDEPENDENT CENTRIFUGE 1
After lunch, from 1300 to 1600 Bowman would make a slow and careful tour of the ship — or such part of it as was accessible. Discovery measured almost four hundred feet from end to end, but the little universe occupied by her crew lay entirely inside the forty-foot sphere of the pressure hull.
Here were all the life-support systems, and the Control Deck which was the operational heart of the ship. Below this was a small "space-garage" fitted with three airlocks, through which powered capsules, just large enough to hold a man, could sail out into the void if the need arose for extravehicular activity.
The equatorial region of the pressure sphere — the slice, as it were, from Capricorn to Cancer — enclosed a slowly rotating drum, thirty-five feet in diameter. As it made one revolution every ten seconds, this carrousel or centrifuge produced an artificial gravity equal to that of the Moon. This was enough to prevent the physical atrophy which would result from the complete absence of weight, and it also allowed the routine functions of living to be carried out under normal — or nearly normal — conditions.
The carrousel therefore contained the kitchen, dining, washing, and toilet facilities. Only here was it safe to prepare and handle hot drinks — quite dangerous in weightless conditions, where one can be badly scalded by floating globules of boiling water. The problem of shaving was also solved; there would be no weightless bristles drifting around to endanger electrical equipment and produce a health hazard.
Around the rim of the carrousel were five tiny cubicles, fitted out by each astronaut according to taste and containing his personal belongings. Only Bowman's and Poole's were now in use, while the future occupants of the other three cabins reposed in their electronic sarcophagi next door.
The spin of the carrousel could be stopped if necessary; when this happened, its angular momentum had to be stored in a flywheel, and switched back again when rotation was restarted. But normally it was left running at constant speed, for it was easy enough to enter the big, slowly turning drum by going hand-over-hand along a pole through the zero-gee region at its center. Transferring to the moving section was as easy and automatic, after a little experience, as stepping onto a moving escalator.
From 2001 A SPACE ODYSSEY by Sir Arthur C. Clarke (1969)
From The Dream Machines by Ron Miller (1993). Images from the Frederick Ordway collection.
One of the nagging problems with an independent centrifuge is trying to transfer power and/or fluids across the hub. You cannot just put a cable or hose across because the spin will just keep twisting it until it snaps. Many designs try to use slip-rings(to transmit power) and rotary unions(to transmit fluids) but these are maintenance horror-shows and have limited capacity. Try sending megawatts over a slip ring and see how long it lasts. And if you are trying to send multiple fluid types (e.g, drinking water and sewage) the problem multiplies.
One possible solution is to use a Canfield Joint. It can move a linkage over 360° without twisting any number of hoses and cables. Watch the video, especially the part about the solar panels. Note that while the spacecraft is spinning, the orientation of the solar panels will be constantly changing but they will always be perpendicular to the sun. The same will apply to an array of ion drive rockets, the orientation will constantly change but they will always be aimed at the mandated thrust axis.
Video Clip "CEV Gimbal and Array Tracking" click to play video
CANFIELD JOINT 1
The Canfield joint is a pointing mechanism that allows for full hemispherical motion from whatever connects to it. Invented by Dr. Stephen Canfield of the Tennessee Tech University, this joint was developed specifically for spacecraft thrusters and solar panels. Its gimbal mount simplifies the roll program performed when the space shuttle launches and allows for greater overall manoeuvrability from the reaction control system. Unlike other joints, which can only transmit rotational motion up to a constant 70° (not 0 ° to 70°), this joint can transmit rotary motion from 0° and in increments one 1° to 90°. This joint also has higher stability due to its unique cage-like design. By making use of appropriate actuators (hydraulic/pneumatic), the joint can be moved with surprising speed and accuracy.
When applied to solar panels, the Canfield joint tracks the Sun more of the time and will not tangle the power cords attached to them. This is especially valuable to space flight when the spacecraft is performing complicated manoeuvres. Its application was expected to be incorporated into the now-defunct Constellation Program as a key element.
Advantages Over Fixed Thrusters
Fewer parts resulting in fewer mechanical failures and less weight
Solar arrays, communications systems, and thrusters would all need to transfer power, data, and fluids across
rotating joints or slip rings if they were to be mounted near the pressurized module and yet fulfill their duties. These
fluid, data, and power transfers could become very unpleasant development problems. Fortunately, several recent
innovations make such operation possible without any sort of rotating connections.
The key is a unique mechanical joint developed by Dr. Stephen Canfield of Tennessee Technological University.
The “Trio Tri-Star Carpal Wrist Robotic Joint”, mercifully referred to simply as the Canfield joint, is a “parallel”
mechanism that allows a structure to point at an inertial target while being mounted to a rotating platform. Fluid,
power, or data connections can be made from one side of the joint to the other because the two sides of the joint do
not differentially rotate, even though the joint itself may be bent 90 degrees or more.
The kinematic behavior of the Canfield joint is extremely difficult to describe in words, and not much easier to
discern in still pictures, but suffice it to say, seeing is believing—the joint is truly capable of smooth pointing and
orientation within a hemisphere.
Figure 12: A series of still pictures showing a typical reaction-control thruster mounted on a Canfield joint, capable
of pointing any direction within a hemisphere.
The parallel structure of the joint not only gives it tremendous strength, but three degrees of freedom—altitude,
azimuth, and “plunge”. The first two degrees are sufficient to allow it to point to any direction within a hemispheric
workplane. And unlike other structures, the joint can access this entire workspace without encountering
mathematical “singularities” that make solution of the base angles impossible. The joint is driven by three actuators
on each of the three base legs. Any commanded direction corresponds to a unique solution of the three angles
between the base and the base legs.
Figure 13: A unique arrangement of solar arrays mounted on Canfield joints enable constant solar tracking at any
beta angle on a rotating facility with a minimum of bending loads across the array.
Boeing STCAEM Mars NEP
Roll ring is responsible for transferring megawatts of electricity and kilograms of propellant across a rotating joint. For months.
Canfield Joint
It can aim a thruster over a 180° solid arc, yet not wind up or kink the power and propellant lines
I told the story of how I had gotten involved with the JSC study of an artificial-gravity/nuclear-electric propulsion (AG-NEP) Mars vehicle study. I came into the study near the end (January 2003) and right before the Columbia disaster.
As near as I could tell, after Columbia happened, nobody kept working on the AG-NEP design, or even on Mars studies for that matter. If they did, I certainly didn’t know about it.
But for some reason, the whole idea kept rattling around in the back of my head. There were a few reasons that the JSC guys had given me that were compelling for AG-NEP as a Mars vehicle.
1. You solve the muscle and bone loss problem through artificial gravity. You don’t have to worry about hours of exercise or fret whether their bones will snap when they re-enter the Earth’s atmosphere. They’re going to be good and strong when they get home because you made sure that their bodies felt a normal level of gravity throughout the trip.
1a. Because you’ve solved the muscle and bone loss problem, the pressing need to fly the mission quickly is tremendously diminished. You can go to Mars and come back in the three-year time frame that is more astrodynamically “natural”, in other words, the time frame that aligns with the Earth and Mars’s movements around the Sun.
2. By using nuclear-electric propulsion, you actually have a credible propulsion system to execute a mission abort if you need to, for some reason along the way. You’re not going to get back quickly, but you can get back.
3. By using nuclear-electric propulsion, you actually have a credible story for vehicle reuse. You could refuel the vehicle and go again. Or you could go somewhere else like an asteroid. You have a lot more flexibility than in a chemical or NTR vehicle.
I liked the basic idea. Here was a vehicle that might actually be a true “spacecraft” as we like to think of them, with the ability to go and come from a variety of destinations and be reused. I imagined that this might be the kind of vehicle that would be in Captain Picard’s ready-room a few centuries from now as a little model, with him saying, “This is a model of the vehicle man used to explore the solar system in the early days.”
But there were definitely residual technical problems with the design as it stood when I was exposed to it. The biggest one had to do with getting the body-mounted electric thrusters to point in the right direction as the vehicle moved around the Sun, and the problem got so bad when you got to a spiral-in, spiral-out scenario around a planet that it was practically a no-go. It came down to the architectural decision to orient the thrusters so that they were firing in the same direction as the vehicle’s angular momentum vector (orthogonal to the rotation plane). That approach certainly solved any problem of plume impingement, but since the inertial direction of the thrust vector was going to change by >180 degrees during the transit to Mars, and by that much or more on the way back, you had to continuously move the angular momentum vector of your spacecraft around, and there was a non-trivial cost associated with doing that. During spiral-in or spiral-out the cost became prohibitive.
The other problem concerned spin up and spin down of the system. The JSC design assumed that spinup and spindown would be done by dedicated thrusters on the habitat module end of the vehicle. That meant a duplication in thrusters and tankage for a capability that you would want to utilize as little as possible.
Despite these problems, I recognized that the JSC design as it stood had also solved a great many problems, and that perhaps it represented a minimum in the design space of overall difficulty. I’m fond of saying “you have to pick your pain” when it comes to system optimization, and that the “best” system always involves residual problems. Perhaps this was as good as it got.
Or maybe it could be even better.
One day I was driving down the street in the pouring rain and a simple sequence of thoughts formed in my brain:
1. I had spent a whole bunch of time trying to figure out how to get solar panels on a MXER tether to point at the Sun while the tether rotated.
2. I had been lucky enough to meet Steve Canfield and had figured out how to use the Canfield joint to fix the problem of pointing the panels at an inertial target (the Sun) while the overall structure (the tether) rotated.
3. The basic problem that the AG-NEP vehicle faced was the need to point its electric thrusters at an inertial target (its thrust vector) while it rotated, much like the MXER tether needed to do with its solar arrays.
4. The reasons that JSC had rejected rotating machinery for the AG-NEP vehicle had to do with the difficulty of moving propellant and electric power across a rotating connection like a rotary union or slip-ring, and these were good and valid reasons.
5. The Canfield joint had no such problems because provided that propellant lines or power cables were flexible, they could transmit fluids and power across a Canfield joint.
thus…maybe a Canfield joint was the answer to the problems of the AG-NEP vehicle!
I couldn’t believe that I had known about the Canfield joint for so long and hadn’t put these utterly compatible ideas together.
If we were to use the Canfield joint on the AG-NEP vehicle, the overall geometry would change substantially. The logical location for the thrusters moved from the center of the vehicle, on a cross-brace, to the reactor end of the vehicle. This kept the high-power lines short since they didn’t have to run all the way to the middle of the vehicle to reach the engines. You could also place the propellant tanks on the reactor end of the vehicle as well.
This in turn led to several other vehicle advantages:
1. The moment-arm from the reactor module to the hab module is shortened (or alternatively the moment arm from the CM to the hab module can be lengthened) because now there is much more mass counterbalancing the hab module. The thrusters and the propellant constitute a lot of mass.
2. The truss between the reactor module and the hab module now doesn’t need any “cross-brace” on it or any other body-mounted structures. It can be a strong but simple extensible structure, like a CoilABLE boom, with nothing more than the power connection between the reactor and the hab module integrated into it.
3. The main thrusters can be used for spin up and spindown operations. By placing them on the end of the moment arm, they now have the ability to change the angular momentum of the vehicle, by simply remaining fixed relative to the vehicle during spinup and spindown. In fact, spin rate can be changed during thrusting simply by changing the fraction of the spin arc during which the thrusters fire.
4. The angular momentum vector of the vehicle doesn’t have to point along the thrust vector (like in the JSC design) but can point orthogonal to the spacecraft’s orbital plane. This means that the angular momentum vector’s direction doesn’t have to be altered during flight. This also means that spiral-in/spiral-out maneuvers at planets are no problem.
5. If you wanted to use the AG-NEP vehicle for asteroid missions, the electric thrusters might even be able to be used as “descent engines” provided some “landing gear” were provided on the habitat module.
6. Propellant could be used for additional reactor shielding during the flight.
Gimbaled Centrifuges are attempts to deal with the "which way is down?" problem.
As a general rule they are hideous engineering challenges and maintenance nightmares. Whether they are part of an independent or dependant centrifuge, the gimbaled centrifuge is adding an additional set of gearing, machinery, and points of failure.
In addition, they all suffer from the sloped floor problem inherent in the Polygon Centrifuge. The floor will seem like it has a series of hills and valleys. The only choices the ship designers will have is will the floor seem normal under centrifugal gravity and hilly under thrust, or vice versa?
A third problem is the variable gravity. Remember that the effective gravity depends upon the floor's distance from the spin axis. So spacecraft designers tend to make the gravity section only one or two floors "tall". The more floors, the more drastic the gravity difference between the top floor and the bottom floor.
The problem happens when spacecraft designers try to deal with the polygon centrifuge slope problem by dividing up the centrifuge into a series of narrow segments instead of one big ring. The idea is that in a narrow segment it is not quite so obvious that the floor slopes. The problem is that since the segments are narrow, in order to get the same ground area as a continuous ring you will be forced to stack multiple segments. Then the variable gravity problem rears its ugly head. Examples of this arrangement include the Pilgrim Observer and Dream Pod 9.
Pilgrim Observer
MPC model #9001 designed by G. Harry Stine, 1970
Internal layout.
Under thrust, the arms must be angled to align with the vector sum of the centripetal acceleration and the thrust acceleration. Otherwise the direction of "down" will appear to be towards the rear-wall/floor corner of the cabin, and the rooom will feel like it is tipped on its corner. Of course the logical thing to do is while thrusting to stop the centrifuge entirely and fold the blades downward. But this is a good illustration of how the two forces interact. Artwork by Zubie of the blog Constant Variations.
Pilgrim Observer
Level
Dist from center
Centrifugal Accel
Gravity
Level 6
10.16 m
0.447 m/s
0.05g
Level 5
12.70 m
0.559 m/s
0.06g
Level 4
15.24 m
0.671 m/s
0.07g
Level 3
17.78 m
0.782 m/s
0.08g
Level 2
20.32 m
0.894 m/s
0.09g
Level 1
22.86 m
1.006 m/s
0.10g
Another possibility is an arrangement like the Pilgrim Observer. This is a variant on rotating the room on gimbals, it is actually a "gimbaled centrifuge". The three living quarters are held parallel to the spacecraft's long axis when under acceleration. At other times, they are extended at ninety degrees, and spun like blades of a propeller to act as a centrifuge. The direction of "down" is always the same, whether under thrust or spin. This also allows the hub to remain stationary, providing a mounting for all the telescopes and other sensors which would otherwise have to cope with being spun around. Not to mention simplifying the docking of small craft. In the diagram, the three living quarters arms and the thin ring they are attached to are the only parts of the spacecraft that spin, the rest of the spacecraft is stationary.
The blades can be spun up by attitude jets, or by a flywheel. The advantage of a flywheel is that the blades can be stopped by stopping the flywheel.
In the picture of the Pilgrim Observer, it looks like there are six levels on each blade. Use the distance from the floor to the center of rotation as "point X" in order to calculate the artificial gravity for each level. The Pilgrim spins at a rate of 2 revolutions per minute, the maximum radius at the bottom of the blade is 22.86 meters (75 feet), each deck is 2.54 meters tall (100 inches).
The innovative people at Dream Pod 9 have an elegant version of the gimbaled centrifuge. Their ships have a centrifuge ring which pierces the centers of a series of rectangular habitat modules. The habitat modules can pivot on their axis. There are two habitats visible in the image above. In the head-on view to the right, they are at one o'clock and seven o'clock, with the pivot located where they intersect the ring. As in the Pilgrim, they pivot so that down is aft when the ship is under thrust, then pivot so that down is sideways while the ring starts rotating.
The pivot is the weak point, obviously. The pivots on the US Air Force B-1 bomber are only rated for about three gravities of acceleration.
Graham Baxter points out that the diagram pictured to the right makes more sense if the labels for "In Flight" and "In Free Fall" are swapped.
It strikes me that the design featured has the angle of the habitat modules backwards; instead of having the modules in a vertical 'office building' layout as shown, wouldn't it be better to lay them out horizontally, with the decks running parallel to the long axis of the module? With the decks laid out in this fashion, the module would have far less variation in centripetal force between decks when under rotation and depending on how the module was locked into place during acceleration, more/stronger anchoring points to the rotating frame as well?
At the very least, you cut down on the need to climb all those damn stairs.
Graham Baxter
Both Nick Dumas and Christopher Moore have pointed out to me that Graham Baxter's arrangement is actually the way the designers intended. The problem is that the diagram is confusing. Please find below a modified diagram that makes things clear.
Clearer diagram.
Unknown CGI artist, please get in touch with webmaster
Ezekiel's Wheel
I have thought up a not terribly original variant on the gimbaled centrifuge that I call "Ezekiel's Wheel". Be told that when I show this design to real engineers they laugh themselves silly, mostly due to the reasons given by Ken Burnside.
Remember the basic problem is that the direction of "down" is different under thrust than it is under spin gravity.
Centrifuge ship with thrust Aft Is Down Down is parallel to thrust axis, in the direction the exhaust is traveling.
Centrifuge ship with spin Out Is Down Down is at 90° to spin axis, pointing away from spin axis. The spin axis coincides with thrust axis.
A gimbaled centrifuge uses tall narrow slabs for the centrifuge, rotating them to change from thrust mode to spin mode. The trouble is that slabs are a very inefficient use of habitat space, and are subject to the variable gravity problem. It would be nice if you could somehow rotate the orientation of a full 360° doughnut shaped centrifuge.
Imagine that the doughnut is actually sliced through to form six or so radial segments (i.e., cut the doughnut like it was a pie). See the green parts in the diagram to the right. For gimbaling, rotate each segment along their long axis to switch modes. Note red arrow for "direction of 'down' while thrusting" and yellow arrow for "direction of 'down' while spinning".
The hard part is the mechanism that allows the segments to pivot. However, that has been solved by Josef F. Blumrich, formerly of NASA. His patent 3,789,947 is for a "unidirectional wheel", but for our purposes it includes a design for the pivot mechanism.
The gold wheels in Blumrich's mechanism allow the green centrifuge segments to rotate for mode changing. Yes, this is a monstrous Rube Goldberg contraption but you can't have everything.
The main problem is it still suffers from the sloped floor problem. Because that problem is addressed by using tall narrow slabs for the centrifuge. Which this design was trying to avoid.
In the diagram, note that the floor (which the little man is standing on) is curved. As in all centrifuges, this ensures that the floor will seem flat while under spin (that is, if you place a ball on the floor it will stay put). Unfortunately, when the spin stops and the habitat modules rotate down for thrust gravity, the floor will seem like valleys. If you place a ball on the edge of the habitat floor, the ball will roll "downhill" to the center floor of the module.
Or you could have it the other way. Make the floor straight instead of curved. This way it will seen flat while under thrust. However, under spin, the floor will seem curved like a hill. If you place a ball on the center of the habitat floor, it will roll "downhill" to one of the two edges. This is because the strength of spin gravity depends upon the distance to the spin axis, and the two edges are farther away from the axis than the habitat floor center.
The only solution I've manage to think up involve dynamically altering the contour of the floor, which is an engineering nightmare.
Spin Power
Like everything else, spinning a centrifuge up or down will require power. Most NASA designs use attitude jets at the rim of the centrifuge regardless of whether it is a dependent or independent centrifuge. But some fancier designs feature an independent centrifuge designed like a titanic electric motor, with the spinning centrifuge as the rotor and the stationary ship core as stator. If you want to spin a dependent centrifuge using electricity, use a reaction wheel.
The advantage of attitude jets is they are mechanically simpler than reaction wheels or giant motors. The disadvantage is that jet fuel gets used up and more will have to be imported.
The advantage of reaction wheels is they use no jet fuel. When the wheel is braked to a halt, the spin is converted into electricity and stored in batteries (with some conversion losses). To spin up the wheel you simply tap the power in the batteries, and top off the losses with some juice from the stations power plant.
The disadvantage of reaction wheels is they are much more complicated, and have far more points-of-failure compared to attitude jets.
Power Demands
How much power is required to spin up or spin down the centrifuge? Well, that depends upon the centrifuge's mass, movement of inertia, and rotation rate.
Moment of Inertia Equations
I = Moment of Inertia (kg⋅m2)
M = Mass of rotating object (kg)
R or L = Radius or Length (m)
a = Inner diameter of torus (m)
b = Outer diameter of torus (m)
First you find a Moment of Inertia equation that approximates your centrifuge:
Wheel type space station or wheel type independent centrifuge: Torus
Balanced Tumbling Pigeon: Rod about center
Unbalanced Tumbling Pigeon: Rod about end (if engine is massive)
Dependent centrifuge: Solid cylinder or disc, symmetry axis
Gimbaled centrifuge: I'm still trying to find an equation for that
Use the appropriate equation, plug in the centrifuge mass and dimension(s), and calculate the Moment of InertiaI in kilogram-square meters (kg⋅m2).
Now take the rotation rate Cr(rotations per minute) and convert it to rotation rate Crrad(radians per second)
This is the amount of Torque that must be imparted to that particular centrifuge to spin it up to the desired rate, or spin it down from that rate to stationary.
Assume we are spinning up by using attitude jets. Say we have a tumbling pigeon, and are using one jet on the ship's fore end(the nose) at 90° to the ship's long axis and a second jet on the ship's aft end (the tail with the rocket engines), at 90° in the opposite direction of the first jet. There are two jets, so each is responsible for τ / 2 worth of torque.
τfraction = τ / NumAttitudeJets
How many Newtons will each jet have to thrust in order to impart the required Torque? Well, the jets are acting like a class 2 lever. This means the farther the jets are from the spin axis, the fewer the Newtons they will have to thrust to create the Torque.
If the centrifuge is a wheel station or independent centrifuge, the attitude jets will be mounted on the wheel's rim, so LeverDist will be the wheel radius.
SingleJetThrust = τfraction / LeverDist
Now, I am a little fuzzy on this, but I'm pretty sure that is the amount of thrust required to produced the desired spin with a one-second burn. Meaning if you used attitude jets with only half that thrust, it would take two seconds to produce the spin. One-third thrust would take three seconds, and so on.
Example
Here is a USAF 10-Meter nuclear-pulse Orion. It is a tumbling pigeon, rotating as per the big green arrow at 4 rotations per minute. This provides a maximum gravity of 0.45 g at the fore end. There are attitude jets (red flames) on the nose and on the pusher plate, which for purposes of this example I am going to pretend are exactly 25 meters away from the center-of-gravity/spin-point. I am also going to pretend that the center of gravity is at the exact middle, 25 meters away from the fore end. The ship's length is 50 meters, and it has a mass of 475,000 kilograms.
And a couple of science fiction authors realized that the only difference between an electric motor and an electric generator is which side the power is applied to, the mechanism is pretty much the same. Input electricity, the output is mechanical energy, and you can call the device a "motor". But if you take the same device, input mechanical energy, receive electricity as output, then you can call it a "generator".
Meaning if you take a motor and plug it into the electrical wall socket, the rotor spins. But if you manually spin the rotor, electricity comes out of the motor's wires.
This sounds like an academic point. Until that fine day when your ship is far from help and the power plant unexpectedly fails…
SPIN POWER 1
Someone said, "Gee, it must take a lot of power." Lopez answered, "Are you kidding? It's done by electric-braking the main axis flywheels(which is a reaction wheel, not a momentum wheel or control moment gyroscope). The shaft has field coils wound on it; you cut it in as a generator and let the reaction between the wheel and the ship put a spin on the ship. You store the juice. Then when you want to take the spin off, you use the juice to drive it as a motor and you are back where you started, free for nothing, except for minor losses. Savvy?" "Er, I guess so, sir." "Look it up in the ship's library, sketch the hook-up, and show it to me after supper."
(ed note: the boostship Agamemnon suffers a catastrophic failure to its engines {sabotage}, and the cargo tug Slingshot is chartered to go on a rescue mission)
His face didn't change. "Experienced cadets, eh? Well, we'd best be down to it. Mr. Haply will show you what we've been able to accomplish."
They'd done quite a lot. There was a lot of expensive alloy bar-stock in the cargo, and somehow they'd got a good bit of it forward and used it to brace up the bows of the ship so she could take the thrust. "Haven't been able to weld it properly, though," Haply said. He was a young third engineer, not too long from being a cadet himself. "We don't have enough power to do welding and run the life support too."
Agamemnon's image was a blur on the screen across from my desk. It looked like a gigantic hydra, or a bullwhip with three short lashes standing out from the handle. The three arms rotated slowly. I pointed to it. "Still got spin on her."
"Yes." Ewert-James was grim. "We've been running the ship with that power. Spin her up with attitude jets and take power off the flywheel motor as she slows down."
I was impressed. Spin is usually given by running a big flywheel with an electric motor. Since any motor is a generator, Ewert-James's people had found a novel way to get some auxiliary power for life-support systems.(basically they are converting attitude jet fuel into electricity)
Agamemnon didn't look much like Slingshot. We'd closed to a quarter of a klick, and steadily drew ahead of her; when we were past her, we'd turn over and decelerate, dropping behind so that we could do the whole cycle over again.
Some features were the same, of course. The engines were not much larger than Slingshot's and looked much the same, a big cylinder covered over with tankage and coils, acceleration outports at the aft end. A smaller tube ran from the engines forward, but you couldn't see all of it because big rounded reaction mass canisters covered part of it.
Up forward the arms grew out of another cylinder. They jutted out at equal angles around the hull, three big arms to contain passenger decks and auxiliary systems (the three arms are part of the independent centrifuge). The arms could be folded in between the reaction mass canisters, and would be when we started boosting. All told she was over four hundred meters long, and with the hundred-meter arms thrust out she looked like a monstrous hydra slowly spinning in space (design based on the Pilgrim Observer).
The fuel transfer was tough. We couldn't just come alongside and winch the stuff over. At first we caught it on the fly: Agamemnon's crew would fling out hundred-ton canisters, then use the attitude jets to boost away from them, not far, but just enough to stand clear.
Then I caught them with the bow pod. It wasn't easy. You don't need much closing velocity with a hundred tons before you've got a hell of a lot of energy to worry about. Weightless doesn't mean massless.
We could only transfer about four hundred tons an hour that way. After the first ten-hour stretch I decided it wouldn't work. There were just too many ways for things to go wrong.
"Get rigged for tow," I told Captain Ewert-James. "Once we're hooked up I can feed you power, so you don't have to do that crazy stunt with the spin. I'll start boost at about a tenth of a centimeter. It'll keep the screens hot, and we can winch the fuel pods down."
He was ready to agree. I think watching me try to catch those fuel canisters, knowing that if I made a mistake his ship was headed for Saturn and beyond, was giving him ulcers.
First he spun her hard to build up power, then slowed the spin to nothing. The long arms folded alongside, so that Agamemnon took on a trim shape. Meanwhile I worked around in front of her, turned over and boosted in the direction we were traveling, and turned again.
The dopplers worked fine for a change. We hardly felt the jolt as Agamemnon settled nose to nose with us. Her crewmen came out to work the clamps and string lines across to carry power. We were linked, and the rest of the trip was nothing but hard work.
Daddy and Uncle Wes began trying to figure out why the power was out. As near as they could tell, there was a break in the power bus somewhere between the passenger spheres and the biggest part of the solar arrays. This meant an EVA repair, which meant it wasn't going to get fixed anytime soon.
Uncle Wes was stroking his broad chin, and thinking. "Hey, you know those big electric motors up at the axis, the ones for overcoming frictional losses in our spin?"
"Yeah?" said Daddy. "When I was looking over the specs for this ship, it'd occurred to me that if there ever was an interruption of power, you could swap the leads on those motors, making them generators. We'd be using our spin to crank out juice. We could do it for quite a while before we noticed ourselves getting any lighter. We can always make up the difference later."
"Get right on it," Daddy ordered. "Momma and I are going to suit up, get to the Docking Bay, and try to patch our breach. Miranda, you stay here. When Wes gets the power back up, you watch the monitors, and keep us all apprised of our situation."
"OK, Daddy."
Everyone headed up the ladder. I had to wait in the unusually-quiet, dimly-lit Bridge for about fifteen minutes. Then the overhead lights flashed to brilliance, and the monitors winked on. I began punching up camera views of the axis, and the Docking Bay. Uncle Wes was in low-G, and was finishing up his re-wiring job on the spin motors. Daddy and Momma were in space suits, floating over to inspect a hole the size of a washing machine in one of the walls.
From MIRANDA AND THE SPACE PIRATES OR HOW HAVEN ROCK WAS SAVED by Mike Combs (1997)
Asteroid Spin Grav
An asteroid colony or asteroid mine might have the quality of life increased if it can be equipped with spin gravity. The classic technique is blowing an asteroid bubble, it is a pity that it probably won't work.
The safe way is digging out a cylindrical hole for the colony/mine inside the asteroid and spinning the asteroid.
I found an interesting document Stability Of A Rotating Asteroid Housing A Space Station where they focus on asteroid in the size range of 100-500 meters. They try to create a mathematical model to figure out how big the hole and how fast the spin you can get away with, before the rocky asteroid fractures into high-speed meteors.
Variables for a cylindrical space station of height hc and radius rc
Rotation rate ω (in rads per second [rad s-1] and in rotations per minute [rpm]) required to create an artificial gravity of gc on the lateral surface of a cylinder with radius rc [meters] click for larger image
Sketch of an asteroid with a cylindrical cavern used to house a space station
Naturally the cylindrical cavern has to be small enough to totally fit inside the asteroid or the walls will penetrate the asteroid surface and the blasted thing will fly into pieces. Note variable d, this is how far away the edge of the cavern is from the asteroid surface. The cavern penetrates the surface when d becomes zero or negative
Model 1 is based on focusing on the two entire halves of the hollowed-out asteroid The white area in the upper right is the forbidden zone, where the cylindrical cavern is too large to fit inside the asteroid click for larger image
The trouble with Model 1 is that it assumes that the two halves of the asteroid are being driven apart by centrifugal forces. This assumption ain't true no more when d becomes very small (when the edge of the cylindrical cavern get too close to the asteroid surface).
Model 2 tries to fix this by instead focusing on the "mantle" outside the cylindrical cavern. The mantle is the torus (donut shape) created by sweeping the upper hashed part of the diagram between the two red lines around the Y axis.
There are two points where the asteroid might rupture and fly into pieces as the radius of the cave rc increases.
[1] The donut end caps swept by the red lines might fracture under the shearing load
[2] The mantle might fracture because its tensile strength is exceeded by the load exerted by centrifugal force
Model 1 appled to a sample rocky asteroid with dimensions of 500 × 390 meters, composed of basaltic rock with a bulk density ρ = 2.7 g cm-3, tensile strength between 12 and 14 megapascals (MPa), shear strength between 8 to 36 MPa. Artificial gravity level gc is set to 0.38 gE
The red line labeled 3.0×105 represents the maximum cavern surface area of 0.3 square kilometers, which is dangerously close to the white forbidden zone. Model 1 handles this situation poorly. In addition, the closest blue line indicates a tensile stress (σ1) of about 4 MPa (4×106 Pa), which is perilously close to the 12—14 MPa of the rock.
So a smart engineer would select a red line that was closer to the lower left corner, so as to intersect a blue line with fewer pascals.
To my untrained eye it appears that to lower the σ1 you have to increase the cavern radius rc click for larger image
Model 2 appled to the same sample asteroid as the above graph.
The red lines are the same, but the blue lines are dramatically different.
To my untrained eye it appears that to lower the σ1 you have to decrease the cavern height hc click for larger image
Making Do Without
Inflatable mid-torso restraint, Leg rail restraint, Suction shoes Linear induction mobile handhold, Portable handrail, Net-type sleep restraint. Image courtesy of NASA click for larger image
It is tempting to just forget about spin gravity, and just have everybody float around while the ship is not under thrust. While it is true that after about a year in free-fall the human body starts to suffer bone decalcification and other damage, one can assume that future medical will have discovered a treatment. Marshall Savage suggests electro stimulation therapy of the muscles (Ken Burnside says rocket crewmen will have to wear their "jerk-jammies" when they sleep). One would hope that a medical cure will be found for the nausea induced by free fall, or "drop sickness" (they say that the first six months are the worse).
A possible compromise is the personal centrifuge. This is a centrifuge a few meters long, just big enough for one man to strap in, spin up about 30 RPM, and do some exercises. Yes, this will probably give them severe motion sickness, but it will only be for the duration of the exercise period.
FREE-FALL CAT 1
For The Times Magazine, a “Portrait of the Ideal Space Man,” if not the ideal space cat, from February 1958. As experts were contemplating the medical specifics of what weightlessness in space would do to a living, breathing human being, an unlucky kitten was volunteered as a stand-in, floating from the hand of Capt. Druey P. Parks inside an F-94C jet at 25,000 feet. The article, by Donald G. Cooley, characterized the cat’s reaction as “bewilderment.”
(ed note: this is science fact, not science fiction)
And prior to (the) Mercury (program) we hadn't any real experience at all. We flew transport planes in parabolic courses that might give as much as 30 seconds of almost-zero-g, and that was all we knew. I will not soon forget some of our early low-g experiments. Some genius wanted to know how a cat oriented: visual cues, or a gravity sensor? The obvious way to find out was to take a cat up in an airplane, fly the plane in a parabolic orbit, and observe the cat during the short period of zero-g.
It made sense. Maybe. It didn't make enough that anyone would authorize a large airplane for the experiment, so a camera was mounted in a small fighter (perhaps a T-bird; I forget), and the cat was carried along in the pilot's lap. A movie was made of the whole run.
The film, I fear, doesn't tell us how a cat orients. It shows the pilot frantically trying to tear the cat off his arm, and the cat just as violently resisting. Eventually the cat was broken free and let go in mid-air, where it seemed magically (teleportation? or not really zero gravity in the plane? no one knows) to move, rapidly, straight back to the pilot, claws outstretched. This time there was no tearing it loose at all. The only thing I learned from the film is that cats (or this one anyway) don't like zero gravity, and think human beings are the obvious point of stability to cling to...
(ed note: the Lockheed F-94C Starfire was developed from the Lockheed T-33 "T-bird", and they look remarkably alike. So I am pretty sure the photo is from the movie Dr. Pournelle mentions.
On the other hand, here they say general free-fall experiments were started using a Lockheed T-33 "T-bird", went to using an F-89, then ended up using a Lockheed F-94C Starfire. So Dr. Pournelle might have actually seen a T-bird after all, and the photo is from a totally different test. )
Actual unethical experiment story here, complete with results:
My dad was a skydiver back in the sixties. There was a guy in his club that was a nut. He had the idea that he could test the axiom that "cats always land on their feet" from free fall altitude, where he would fall with them and observe their self-righting behavior. He had no interest in aiding their descent, just wanted to see how they behaved in free fall. In his plan, landing was the cats' problem, not his. Scientific impartiality, or some such thing.
He took four stray cats up in a pillowcase for the jump. After exiting the plane, he turned the pillowcase inside out, releasing the cats. To his great surprise, all four cats attached themselves to his body immediately. With their claws. Given that cats have 18 claws each, he was punctured at least 72 times. More, probably, because he struggled vainly to remove the cats as he fell, but they were having none of it, and would reattach with even more conviction with every effort he made to pull them off.
Presently, he was out of altitude, and had to turn his attention to opening the chute. Let's pause to do some math. A chute opening can generate as much as 3 Gs of force. The average cat weighs 8 lbs at 1 G. At three Gs, this becomes 24 lbs per cat. So when the chute opened, for a moment this guy had 72 razor sharp claws in his skin, each one being pulled down with a force of about one and a third pounds. That's 96 pounds of cat. He was sliced to ribbons, basically.
All four cats hung on through the chute opening, although the skydiver's shredded flesh allowed each one to slip several inches. Bleeding and in misery, the skydiver managed to make a safe, if rather rough, landing in a farm field.
As soon as he hit the earth, all four cats ran off across the field, leaving him to lie there bleeding from his hundred or so wounds.
He was the only member of the skydiving club that was displeased with the results of his experiment.
(ed note: RocketCat is of the opinion that the experimenter got off way too lightly. RocketCat then left to hunt down the experimenter and teach him the error of his ways...)
Video Clip "Trapped in the Air"
(fast forward to 3:11) click to play video
TRAPPED IN MID-AIR 1
artwork by Gordon Davies
Gibson was sitting in the observation gallery, trying to
see how many of the Pleiades he could resolve with the
naked eye, when a small projectile whispered past his ear
and attached itself with a “thwack!” to the glass of the
port, where it hung vibrating like an arrow. At first sight,
indeed, this seemed exactly what it was and for a moment
Gibson wondered if the Cherokee were on the warpath
again. Then he saw that a large rubber sucker had replaced the head, while from the base, just behind the
feathers, a long, thin thread trailed away into the distance.
At the end of the thread was Dr. Robert Scott, M.D.,
hauling himself briskly along like an energetic spider.
Gibson was still composing some suitably pungent remark when, as usual, the doctor got there first.
“Don’t you think it’s cute?” he said. “It’s got a range of
twenty metres—only weighs half a kilo, and I’m going
to patent it as soon as I get back to Earth.”
“Why?” said Gibson, in tones of resignation.
“Good gracious, can’t you see? Suppose you want to get
from one place to another inside a space-station where
there’s no rotational gravity. All you’ve got to do is to
fire at any flat surface near your destination, and reel in
the cord. It gives you a perfect anchor until you release
the sucker.”
“And just what’s wrong with the usual way of getting
around?”
“When you’ve been in space as long as I have,” said
Scott smugly, “you’ll know what’s wrong. There are plenty
of handholds for you to grab in a ship like this. But
suppose you want to go over to a blank wall at the other
side of a room, and you launch yourself through the air
from wherever you’re standing. What happens? Well,
you’ve got to break your fall somehow, usually with your
hands, unless you can twist round on the way. Incidentally, do you know the commonest complaint a spaceship
M.O. has to deal with? It’s sprained wrists, and that’s
why. Anyway, even when you get to your target you’ll
bounce back unless you can grab hold of something. You
might even get stranded in mid-air.
I did that once in
Space Station Three, in one of the big hangars. The nearest wall was fifteen metres away and I couldn’t reach
it.”
“Couldn’t you spit your way towards it?” said Gibson
solemnly. “I thought that was the approved way out of
the difficulty.”
“You try it someday and see how far it gets you. Anyway, it’s not hygienic. Do you know what I had to do? It
was most embarrassing. I was only wearing shorts and
vest, as usual, and I calculated that they had about a
hundredth of my mass. If I could throw them away at
thirty metres a second, I could reach the wall in about
a minute.”
“And did you?”
“Yes. But the Director was showing his wife round the
Station that afternoon, so now you know why I’m reduced
to earning my living on an old hulk like this, working my
way from port to port when I’m not running a shady
surgery down by the docks.”
“I think you’ve missed your vocation,” said Gibson admiringly. “You should be in my line of business.”
“I don’t think you believe me,” complained Scott bitterly.
“That’s putting it mildly. Let’s look at your toy.”
Scott handed it over. It was a modified air pistol, with a
spring-loaded reel of nylon thread attached to the butt.
“It looks like——”
“If you say it’s like a ray-gun I’ll certify you as infectious. Three people have made that crack already.”
“Then it’s a good job you interrupted me,” said Gibson, handing the weapon back to the proud inventor.
They started for the control room, much relieved. Arcot dived first, with Wade directly behind him. Wade decided suddenly to go into his room and stopped himself by grabbing a handhold. Morey, following close behind, bumped into him and was brought to rest, while Wade was pushed into his room. But Fuller, coming last, slammed into Morey, who moved forward with new velocity toward the control room, leaving Fuller hanging at rest in the middle of the corridor. "Hey, Morey!" he laughed. "Send me a skyhook! I'm caught!" Isolated as he was in the middle of the corridor, he couldn't push on anything and remained stranded. "Go to sleep!" advised Morey. "It's the most comfortable bed you'll find!" Wade looked out of his room just then. "Well, if it isn't old Weakmuscles Fuller! Weighs absolutely nothing and is still so weak he can't push himself around." "Come on, though, Morey—give me a hand—I got you off dead center." Fuller flailed his hand helplessly. "Use your brains, if you have any," said Morey, "and see what you can do. Come on, Wade—we're going."
Since they were going to use the space control, they would remain in free fall, and Fuller would remain helplessly suspended in mid-air. The air of the ship suddenly seemed supercharged with energy as the space around them became gray; then the stars were all before them. The ship was moving forward again.
"Well, old pals," said Fuller, "at least I have traffic blocked fairly well if I feel like it, so eventually you'd have to help me. However—" He floundered clumsily as he removed one of his foam-rubber space-boots, "—my brains tell me that action is equal and opposite to reaction!" And he threw the boot with all possible velocity toward Morey! The reaction of the motion brought him slowly but surely to a handhold in the wall. In the meantime, the flying boot caught Morey in the chest with a pronounced smack! as he struggled vainly to avoid it. Handicapped by the lack of friction, his arms were not quite powerful enough to move his mass as quickly as his legs might have done, for his inertia was as great as ever, so he didn't succeed in ducking. "Round one!" called Arcot, laughing. "Won by Kid Fuller on a TKO! It appears he has brains and knows how to use them!" "You win," laughed Morey. "I concede the battle!"
Dorothy floated away from him, frantically clutching at a brace just beyond reach. "Pull me down, Dick!" she called, laughing gaily. Seaton, seizing her instinctively, neglected his own anchorage and they hung in the air together, while Crane and Margaret, each holding a strap, laughed with unrestrained merriment. "Tweet, tweet—I'm a canary!" chuckled Seaton. "Throw us a rope!" "A Dicky-bird, you mean," interposed Dorothy. "I knew that you were a sleight-of-hand expert, Dick, but I did not know that levitation was one of your specialties," remarked Crane with mock gravity. "That is a peculiar pose, Dick. What is it supposed to represent — Zeus sitting on his throne?" "I'll be sitting on your neck if you don't get a wiggle on with that rope!" retorted Seaton, but before Crane had time to obey the command the floating couple had approached close enough to the ceiling so that Seaton, with a slight pressure of his hand against the leather, sent them floating back to the floor, within reach of one of the handrails.
Commander Doyle had invented them, and the name, of course, came from the old idea that once upon a time witches used to ride on broomsticks. We certainly rode around the station on ours. They consisted of one hollow tube, sliding inside another. The two were connected by a powerful spring, one tube ending in a hook, the other in a wide rubber pad. That was all there was to it. If you wanted to move, you put the pad against the nearest wall and shoved. The recoil launched you into space, and when you arrived at your destination you let the spring absorb your velocity and bring you to rest. Trying to stop yourself with your bare hands was liable to result in sprained wrists.
It wasn't quite as easy as it sounds, though, for if you weren't careful you could bounce right back the way you'd come.
From ISLANDS IN THE SKY by Arthur C. Clarke (1952)
SPACESICKNESS
What is so funny about a man being dropsick? Those dolts with cast-iron stomachs always laugh — I'll bet they would laugh if Grandma broke both legs.
I was spacesick, of course, as soon as the rocket ship quit blasting and went into free fall. I came out of it fairly quickly as my stomach was practically empty — I'd eaten nothing since breakfast — and was simply wanly miserable the remaining eternity of that awful trip. It took us an hour and forty-three minutes to make rendezvous, which is roughly equal to a thousand years in purgatory to a ground hog like myself.
I'll say this for Dak, though: he did not laugh. Dak was a professional and he treated my normal reaction with the impersonal good manners of a infight nurse — not like those flat-headed, loud-voiced jackasses you'll find on the passenger list of a Moon shuttle. If I had my way, those healthy self-panickers would be spaced in mid-orbit and allowed to laugh themselves to death in vacuum.
Despite the turmoil in my mind and the thousand questions I wanted to ask we had almost made rendezvous with a torchship, which was in parking orbit around Earth, before I could stir up interest in anything. I suspect that if one were to inform a victim of spacesickness that he was to be shot at sunrise his own answer would be, "Yes? Would you hand me that sack, please?"
"Dak?" I said as he signed off.
"Later," he answered. "I'm about to match orbits. The contact may be a little rough, as I am not going to waste time worrying about chuck holes. So pipe down and hang on."
And it was rough. By the time we were in the torchship I was glad to be comfortably back in free fall again; surge nausea is even worse than everyday dropsickness.
From DOUBLE STAR by Robert Heinlein, 1956
FREEFALL PEOPLE MOVING 1
Artwork by Dominic Harman
He cleared his throat. “Well. The scientific personnel are on schedule also?” “Yes. They’ll arrive in two ferries, first at 1340 hours, second at 1500.” Telander noted agreement with the program clamped to the desk part of the console. Lindgren added: “I don’t believe we need that much interval between them.” “Safety margin,” Telander replied absently. “Besides, training or no, we’ll need time to get that many groundlubbers to their berths, when they can’t handle themselves properly in weightlessness.” “Carl can handle them,” Lindgren said. “If need be, he can carry them individually, faster than you’d credit till you saw him.” “Reymont? Our constable?” Telander studied her fluttering lashes. “I know he’s skilled in free fall, and he’ll come on the first ferry, but is he that good?” The ferry made rendezvous and docked. Bond anchors extended to hold its stubby hull against the larger
curve of Leonora Christine. Her robots — sensor-computer-effector units — directing the terminal
maneuvers caused airlocks to join in an exact kiss. More than that would be demanded of them later.
Both chambers being exhausted, their outer valves swung back, enabling a plastic tube to make an
airtight seal. The locks were repressurized and checked for a possible leak. When none was found, the
inner valves opened. Reymont unharnessed himself. Floating free of his seat, he glanced down the length of the passenger
section. The American chemist, Norbert Williams, was unbuckling too. “Hold it,” Reymont commanded
in English. While everyone knew Swedish, some did not know it well. For scientists, English and Russian
remained the chief international tongues. “Keep your places. I told you at the port, I’ll escort you singly to
your cabins.”
Reymont got busy with his shepherding. Fourth in line was Chi-Yuen Ai-Ling. She had twisted about in her safety webbing to face the port entirely. Her fingers were pressed against its surface. “Now you, please,” Reymont said. She didn’t respond. “Miss Chi-Yuen.” He tapped her shoulder. “You’re next.” “Oh!” She might have been shaken out of a dream. Tears stood in her eyes. “I, I beg your pardon. I was lost —” The linked spacecraft were coming into another dawn. Light soared over Earth’s immense horizon, breaking in a thousand colors from maple-leaf scarlet to peacock blue. Momentarily a wing of zodiacal radiance could be seen, like a halo over the rising fire-disk. Beyond were the stars and a crescent moon. Below was the planet, agleam with her oceans, her clouds where rain and thunder walked, her green-brown-snowy continents and jewel-box dries. You saw, you felt, that this world lived. Chi-Yuen fumbled with her buckles. Her hands looked too thin for them. “I hate to stop watching,” she whispered in French. “Rest well there, Jacques.” “You’ll be free to observe on the ship screens, once we’ve commenced acceleration,” Reymont told her in the same language. The fact that he spoke it startled her back to ordinariness. “Then we will be going away,” she said, but with a smile. Her mood had evidently been more ecstatic than elegiac.
Reymont helped her unstrap and laid an arm around her waist. He didn’t bother with shuffling along in bondsole shoes. Instead, he pushed one foot against the chair and flew down the aisle. At the lock he seized a handhold, swung through an arc, gave himself a fresh shove, and was inside the starship. In general, those whom he escorted relaxed; it was easier for him to carry them passive than to contend with their clumsy efforts to help. But Chi-Yuen was different. She knew how. Their movements turned into a swift, swooping dance. After all, as a planetologist she had had a good deal of experience with free fall. Their flight was not less exhilarating for being explainable. The companionway from the airlock ran through concentric layers of storage decks: extra shielding and armor for the cylinder at the axis of the ship which housed personnel. Elevators could be operated there, to carry heavy loads forward or aft under acceleration. But probably the stairs which spiraled through wells parallel to the elevator shafts would see more use. Reymont and Chi-Yuen took one of these to get from the center-of-mass deck devoted to electrical and gyroscopic machinery, bow-ward to the living quarters. Weightless, they hauled themselves along the stair rail never touching a step. At the speed they acquired, centrifugal and Coriolis forces made them somewhat dizzy, like a mild drunkenness bringing forth laughter. “And ay-round we go ay-gain … whee!”
“That was a trip to write about in my diary. Constable.” Chi-Yuen clutched a handhold and leaned her forehead against the cool metal. Mirth still trembled on her mouth. “No, I’m the one who owes the apology,” he said. “Making you wait here with nothing to do, as if you couldn’t manage in free fall.” “You can’t make exceptions.” Chi-Yuen was altogether serious again.
Hans Gibbs had sent his cousin the briefest, uninformative message from the main control room. "Get your a** over here. On the double, or you'll miss something you'll never see again."
Wolfgang and Charlene were in the middle of first inventory when that message came over the intercom. He looked at her and signed off the terminal at once. "Come on."
"What, right now?" Charlene shook her head protestingly. "We're just getting started. I promised Cameron we'd have this place organized and ready to go to work when they got here. We only have a few more hours."
"I know. But I know Hans, too. He always understates. It must be something special. Let's go, we'll finish this later."
He took her hand and began to pull her along, showing off his hard-won experience with low gee. Charlene had been on Salter Station less than twenty-four hours, the second person to make full transfer from the Institute. It seemed grossly unfair to Wolfgang that she hadn't suffered even one moment of freefall sickness. But at least she didn't have his facility yet for easy movement. He tugged her and spun her, adjusting linear and angular momentum. After a few moments Charlene realized that she should move as little as possible, and let him drag her along as a fixed-geometry dead weight. They glided rapidly along the helical corridor that led to the central control area.
In lieu of a habitat module on a centrifuge, under acceleration, or equipped with technobabble paragravity; science fiction novels often equips the crew with magnetic boots/sandals and a ferromagnetic floor.
Magnetic boots sometimes appear on space suits as well, assuming the hull is constructed out of something ferromagnetic. But magnets do not work very well on hulls composed of titanium, aluminum, magnesium or other space age materials.
If one does have a ferromagnetic hull, it might be best to have magnets just in the boot heels but not the toes, to facilitate walking. The idea is that if a boot is attached to the hull, you can release it by pushing down with your toes and lifing your heel, using a natural walking motion to detach the magnetic heel. Then the boot moves forward, approaching the hull heel-first. This allows the magnet in the heel to attach. At least that's how I remember it, maybe it is the other way around.
In The Expanse, the magnetic boots were electromagnets, so you could turn them on or off. They had red indicator lights and a switch one could operate by tapping boots. One episode also showed that if a person wearing mag boots is shot and killed, they do not fall down. They sort of creepily float in place, attached to the deck by their feet.
In the movie 2001 A Space Odyssey the stewardess wore velcro footies to walk on the velcro floor.
In Robert Forward's Rocheworld, the space marines use 'stiction boots. In Poul Anderson's Tau Zero, they have bondsole shoes.
But it is good to keep in mind that they do not use any of these on the International Space Station. They just float everwhere and to heck with walking. Besides, magnetic fields interfere with navigation and communication systems.
VELCRO SHOES
The stewardess came walking up the narrow corridor to the right of the closely spaced seats. There was a slight buoyancy about her steps, and her feet came away from the floor reluctantly as if entangled in glue. She was keeping to the bright yellow band of Velcro carpeting that ran the full length of the floor — and of the ceiling. The carpet, and the soles of her sandals, were covered with myriads of tiny hooks, so that they clung together like burrs. This trick of walking in free fall was immensely reassuring to disoriented passengers.
From 2001 A SPACE ODYSSEY by Arthur C. Clarke (1969)
MAG BOOTS 1
As they walked thorugh a maze of corridors, the ship started a slight vibration, and gravity slowly reappeared. They were under thrust. Holden used his heels to touch his boots' slide controls, turning the magnets off.
“Click on,” directed the instructor, and placed his boots gently against the side of the lock. Matt did likewise and felt the magnetic soles of his boots click against the steel. “Follow me and stay closed up.” Their teacher walked along the wall to the open door and performed an awkward little squatting spread-eagle step. One boot was still inside the door, flat to the wall, with the toe pointing inboard; with the other he reached around the corner, bent his knees, and felt for the outer surface of the ship. He withdrew the foot still in the lock and straightened his body-with which he almost disappeared, for he now stuck straight out from the ship, his feet flat to her side.
Following in order, Matt went out through the door. The ninety degree turn to get outside the lock and “standing” on the outer skin of the ship he found to be tricky; he was forced to use his hands to steady himself on the door frame. But he got outside and “standing up.” There was no true up-and-down; they were still weightless, but the steel side was a floor “under” them; they stuck to it as a fly sticks to a ceiling.
Matt took a couple of trial steps. It was like walking in mud; his feet would cling stickily to the ship, then pull away suddenly. It took getting used to.
From SPACE CADET by Robert Heinlein (1948)
MAG BOOTS 3
Last of all, Torwald took Kelly to the rear of the shop, where the footwear was kept. They rummaged around for a few minutes while Torwald gave him a running lecture on the virtues of good boots.
"You might not think so, kid, but boots are more important than any other item of a spacer's equipment. That's because you never know when you may be set afoot, or in what terrain, or in what climate." Kelly didn't like the sound of the expression "set afoot."
"Besides," Torwald continued, "a spacer has very little to do with space, any more than a sailor has with water. It's just something to get across to reach the planets, where the jobs are. And on the ground, you need boots. Aha, jackpot!" With that exclamation, he pulled a pair of boots from a bin. "Genuine pre-War unissued Space Marine boots!"
"How can you tell they're pre-War?" Kelly asked, sorting through the bin to find a pair that fit. Torwald turned a boot sole-up.
"See those little threaded holes? That's where they used to screw in the magnetic plates. They haven't used those plates in fifty years, but the Navy required that the mounts be left there in case of equipment failures. When the War came along, they dropped that reg, and a lot of quality, to cut costs. These boots will last you a lifetime."


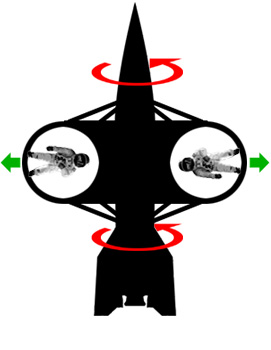

Streaker had been built from a modified Snark hunterclass exploration vessel. Few Snarks were still in service. As Terrans became more comfortable with the refined technologies of the Library, they learned to combine the old and new — ancient Galactic designs and indigenous Terran technologies. This process had been in a particularly awkward phase when the Snarks were built.
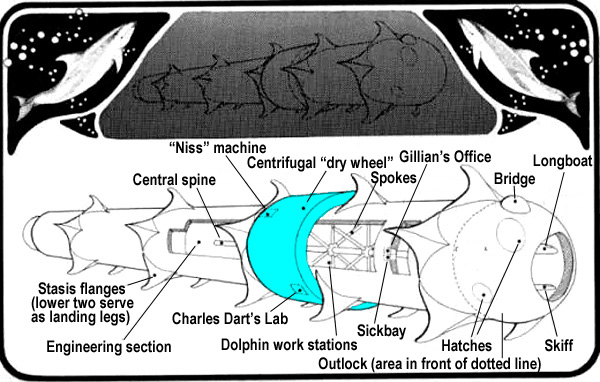




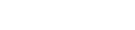
.jpg "Click to open website.")


.jpg "Click to open website.")
.gif)


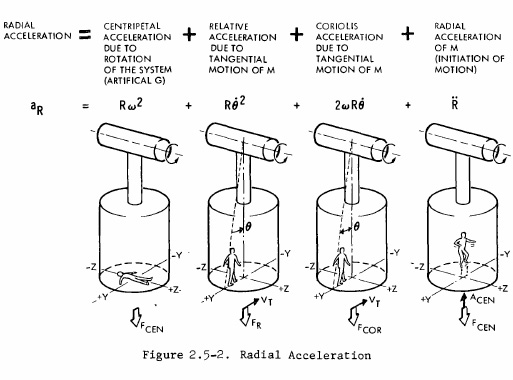
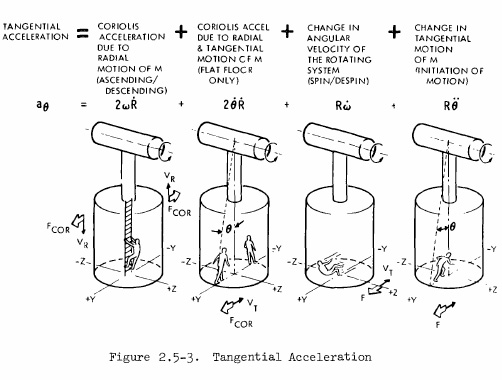
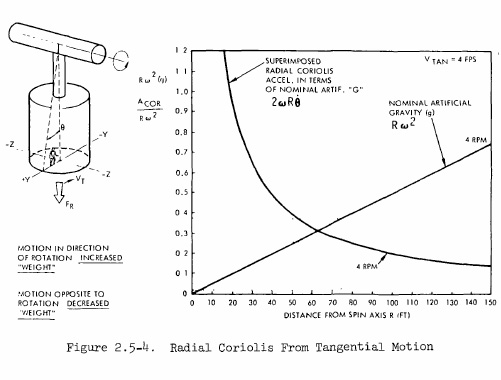
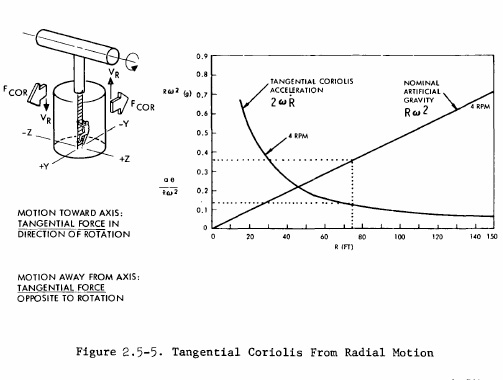






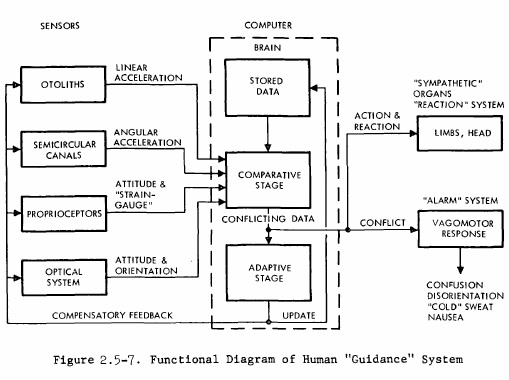

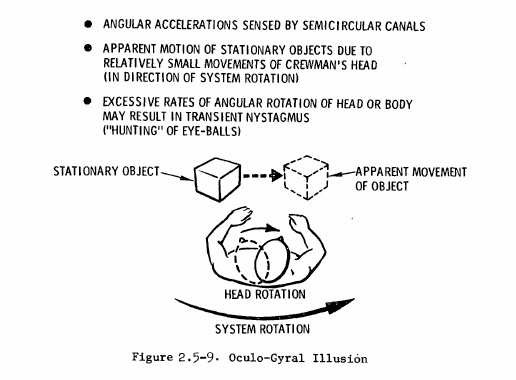
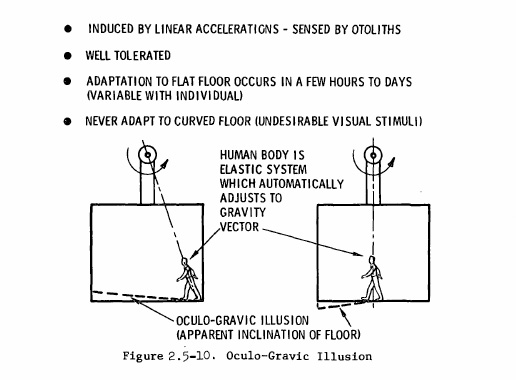






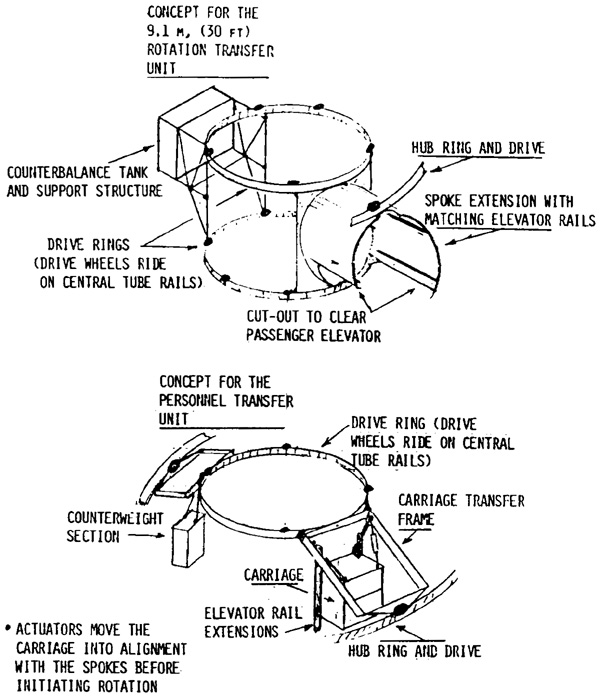



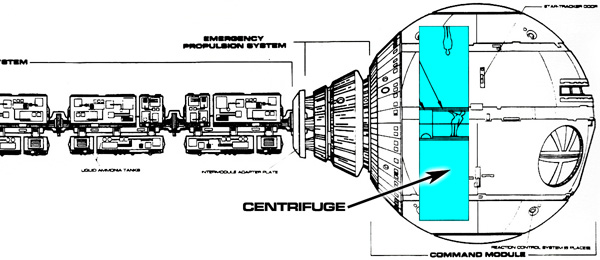


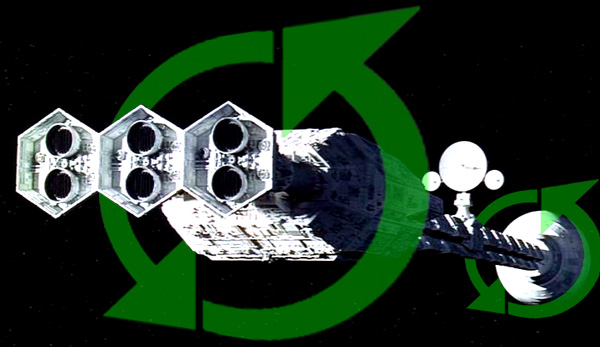
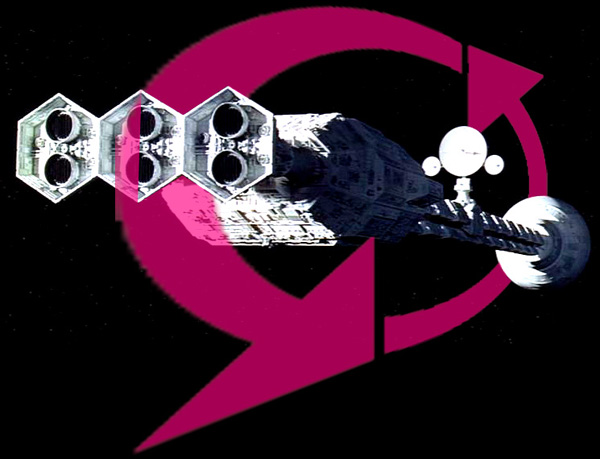
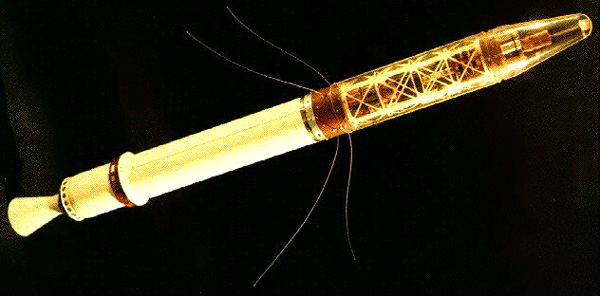

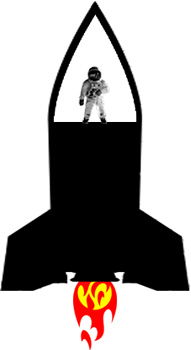
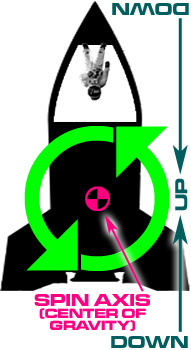
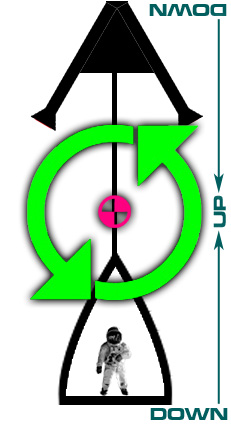
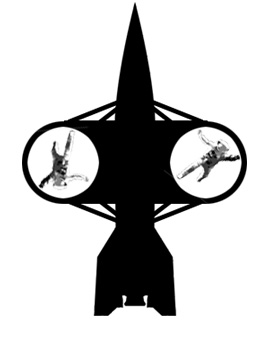
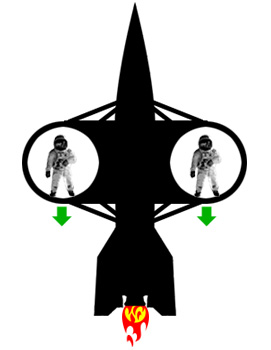
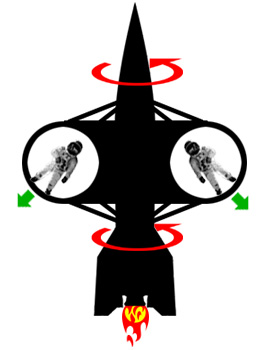
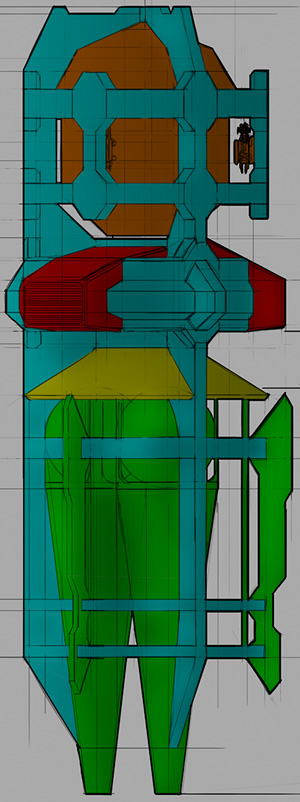

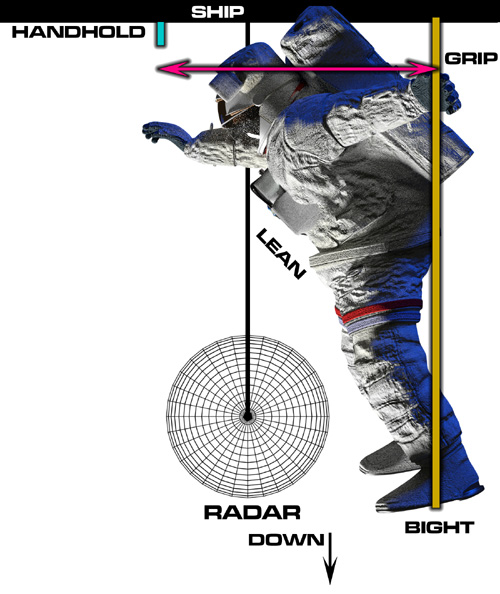
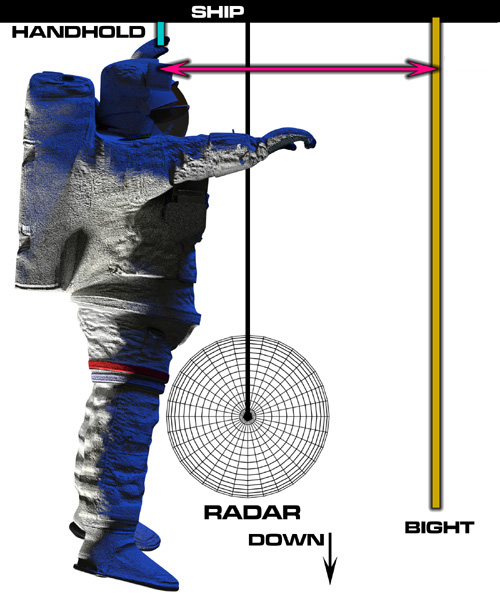

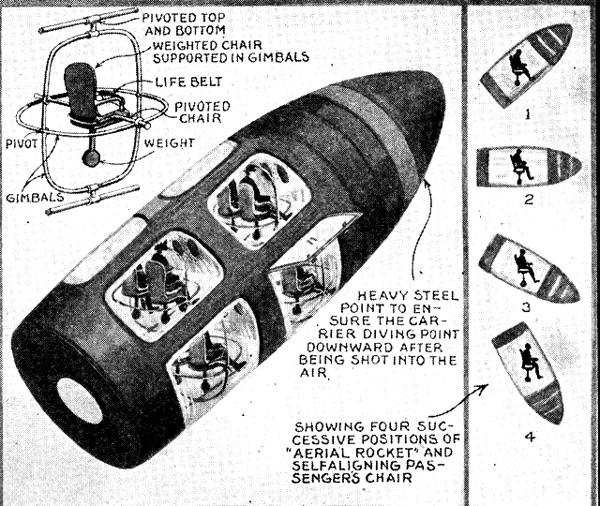













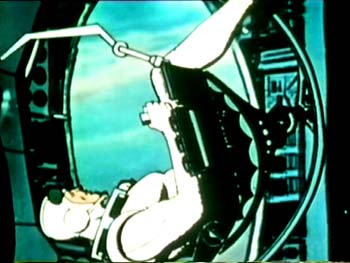





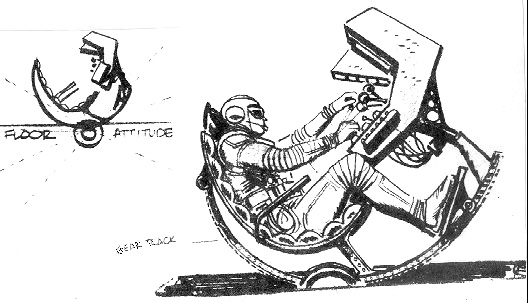







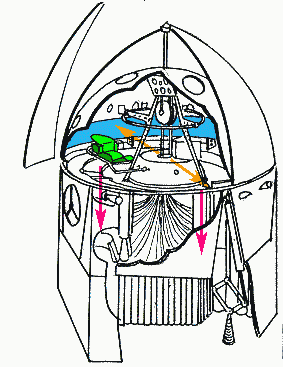
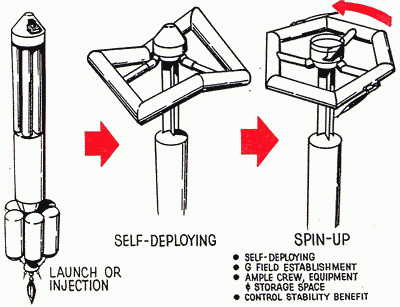
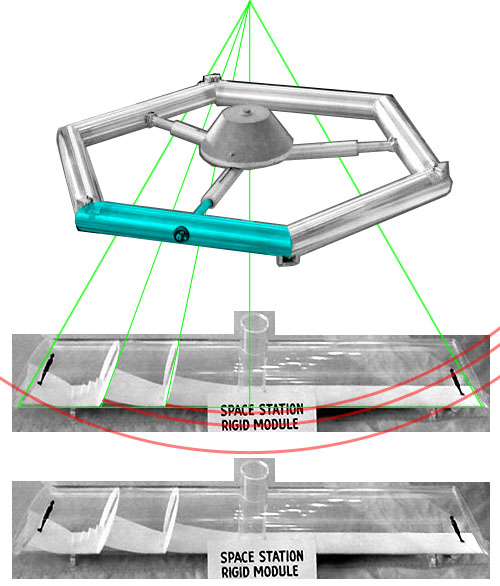


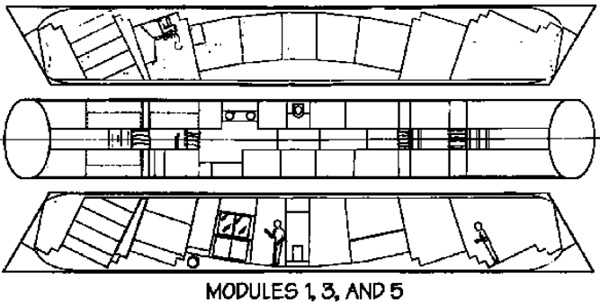
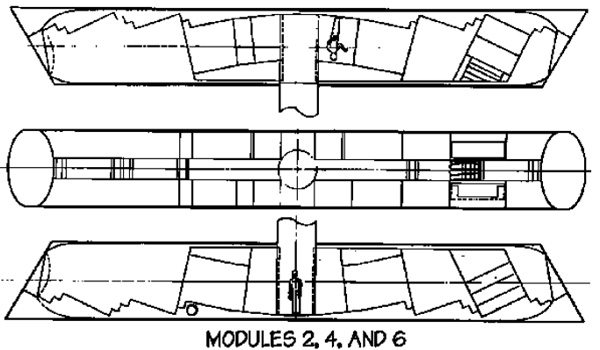
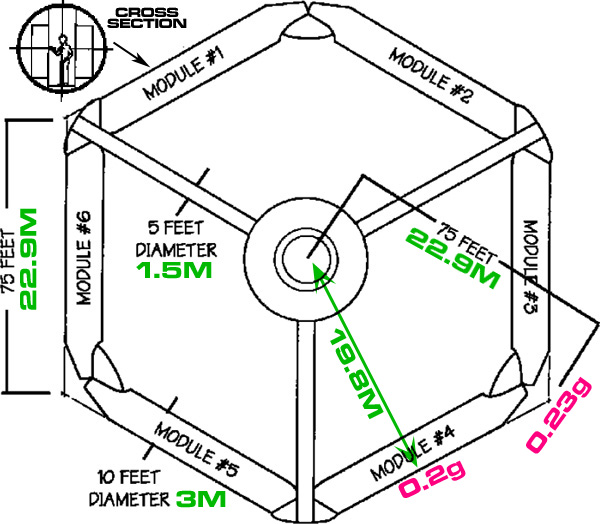
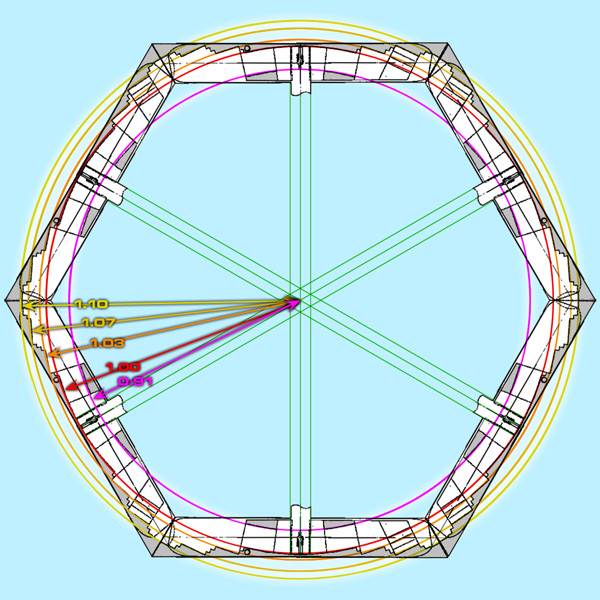
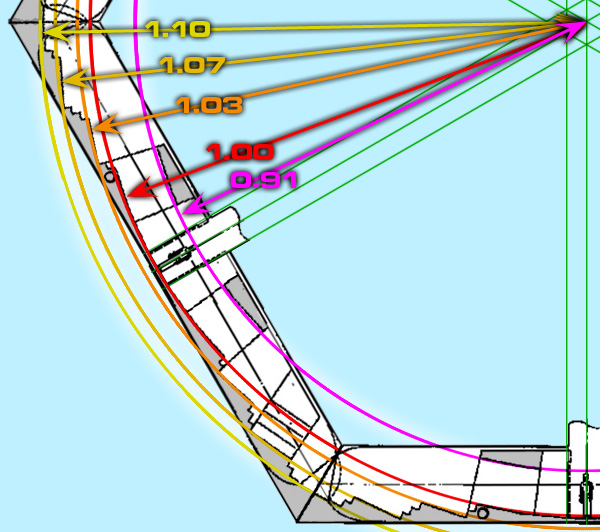


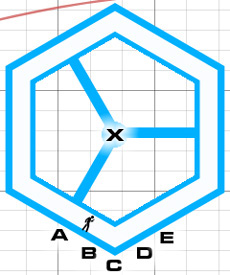

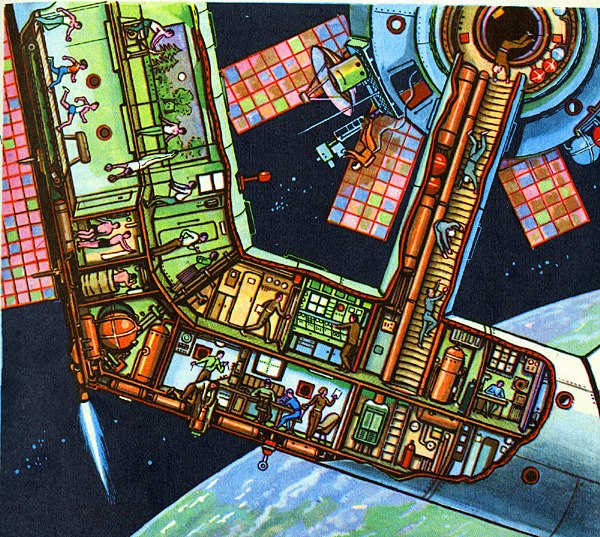




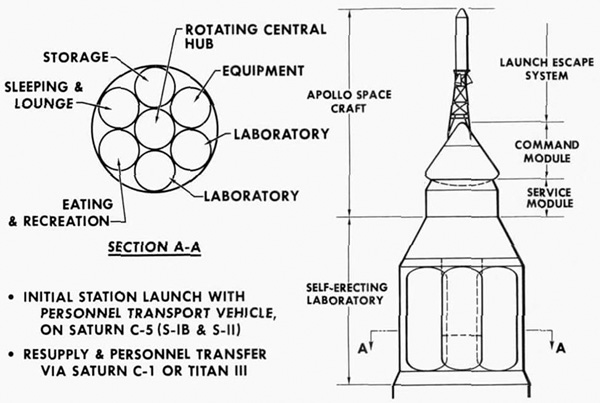
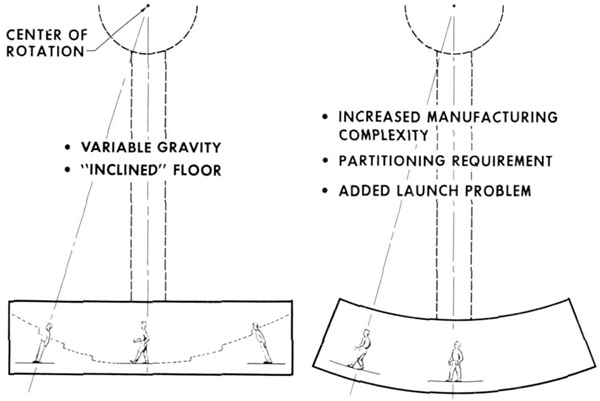
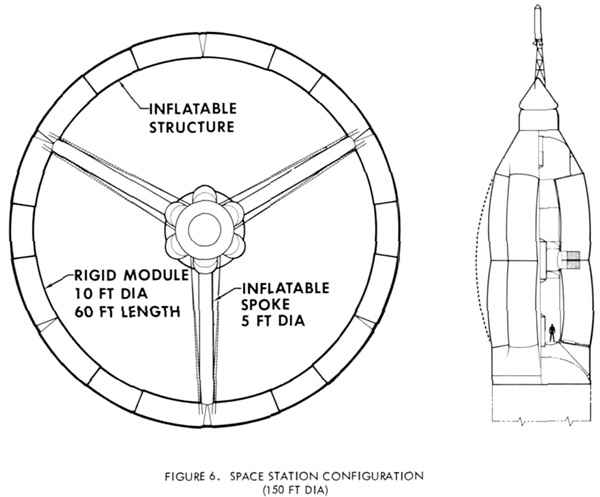
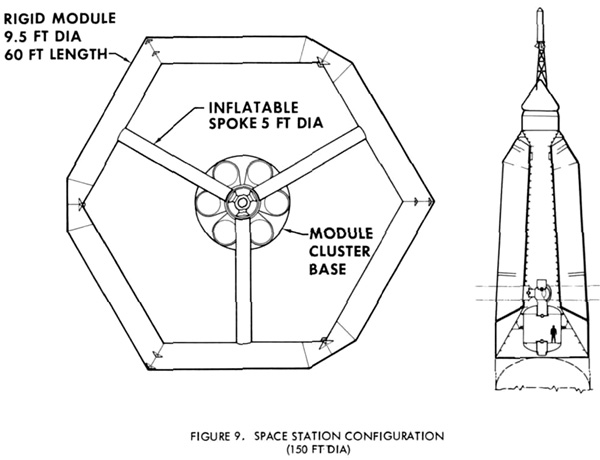
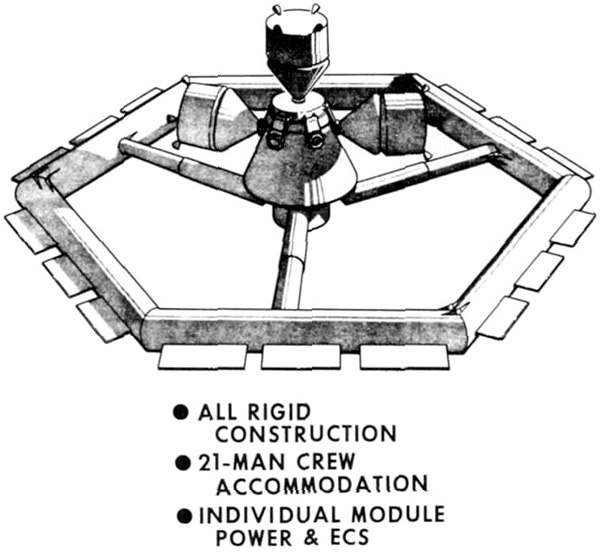
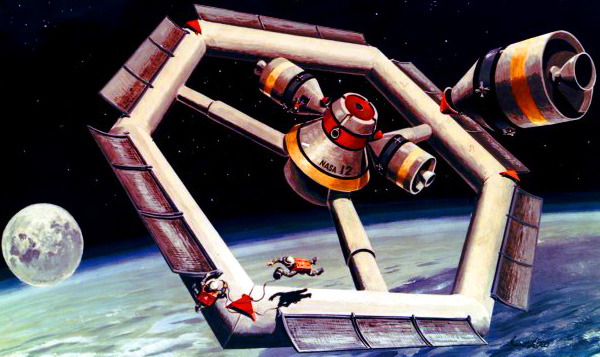
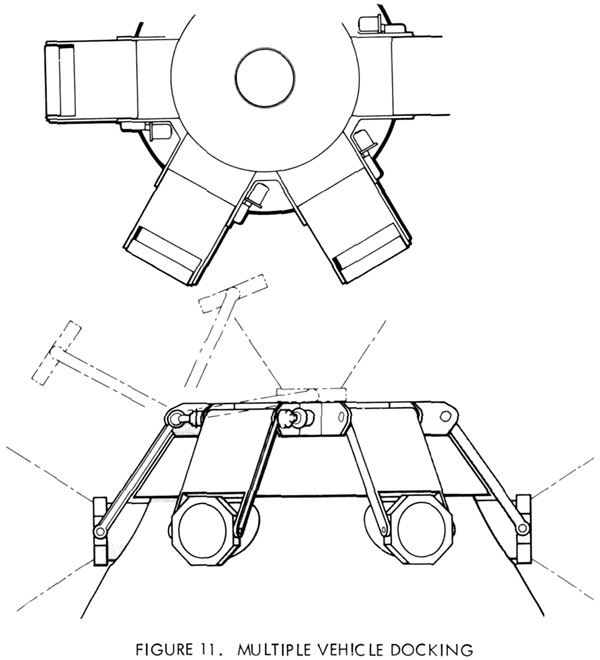
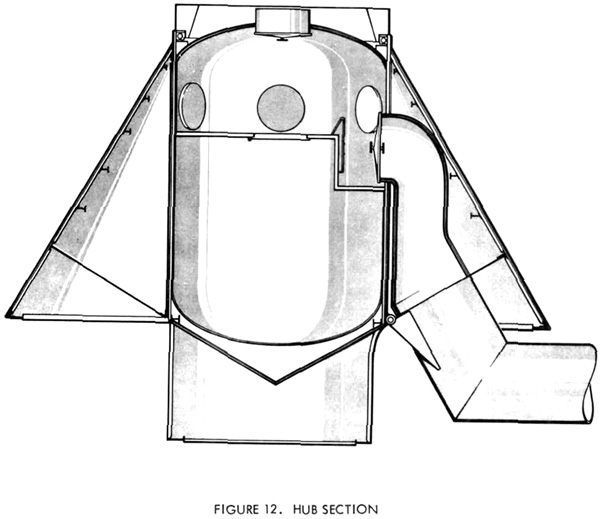




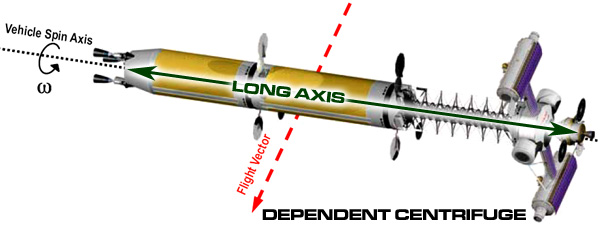
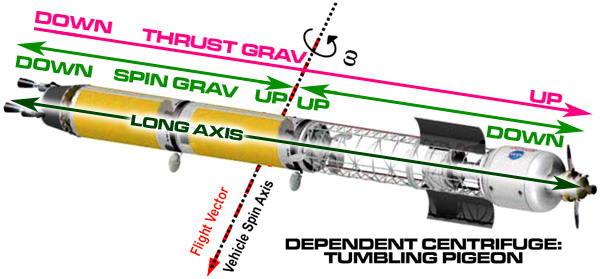
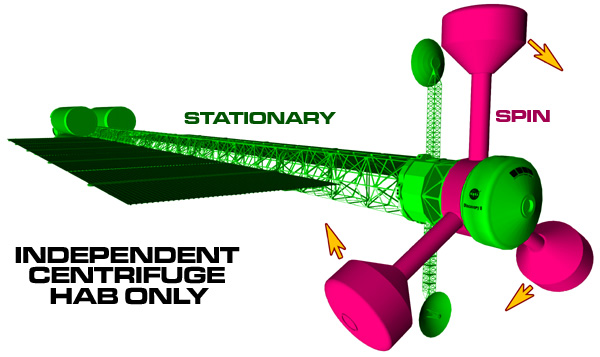
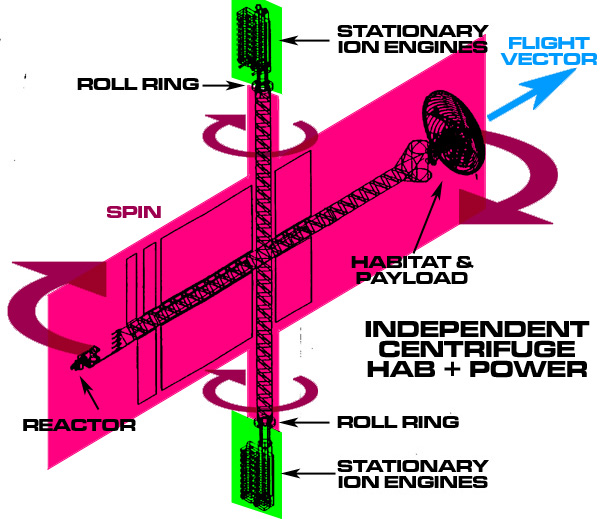
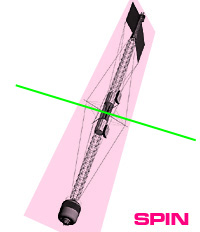

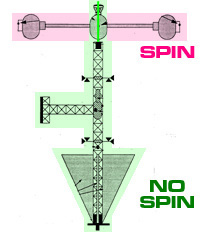
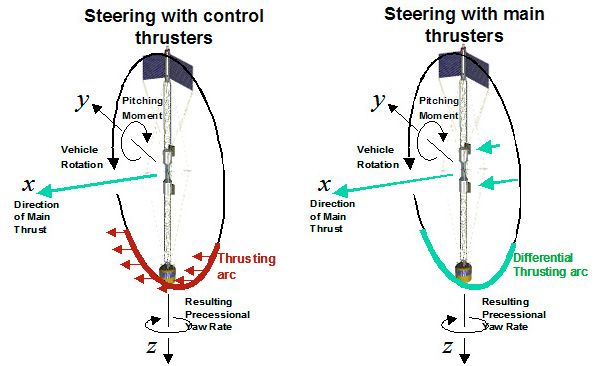


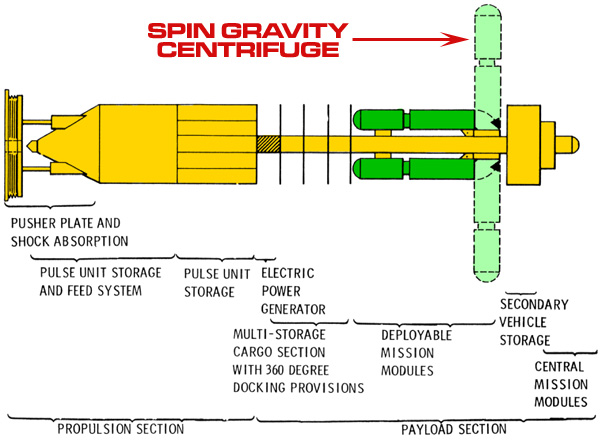
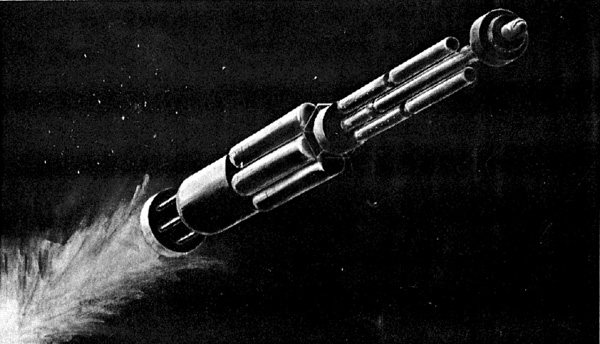
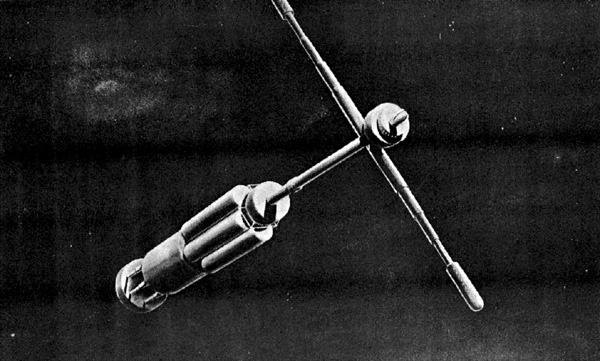
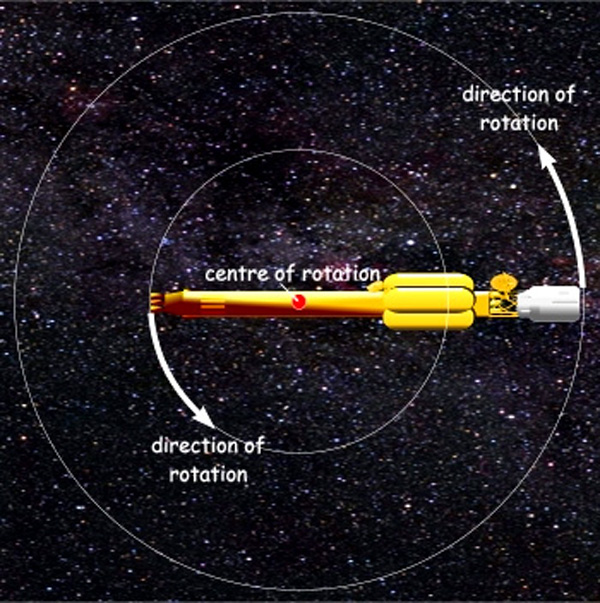
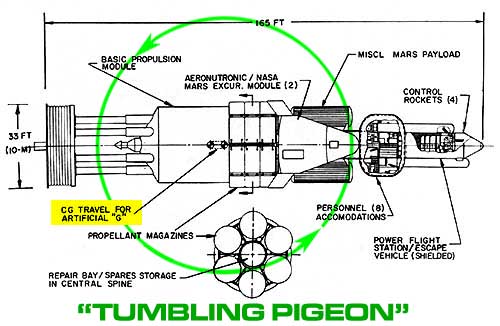

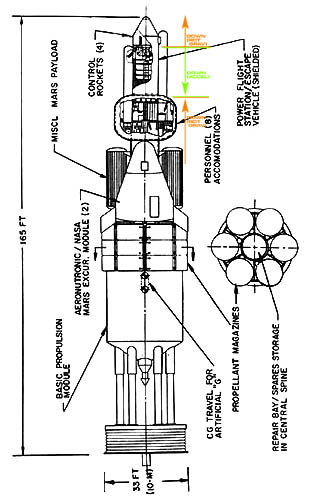

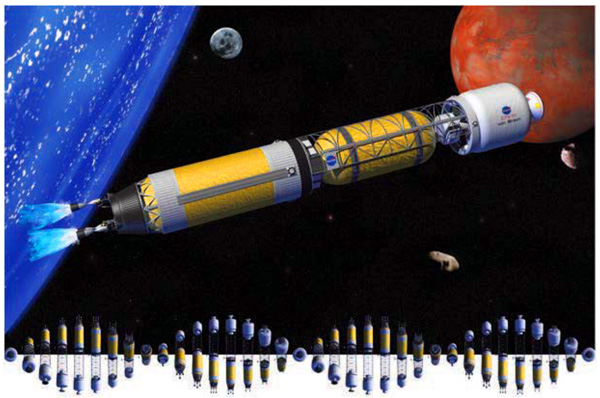

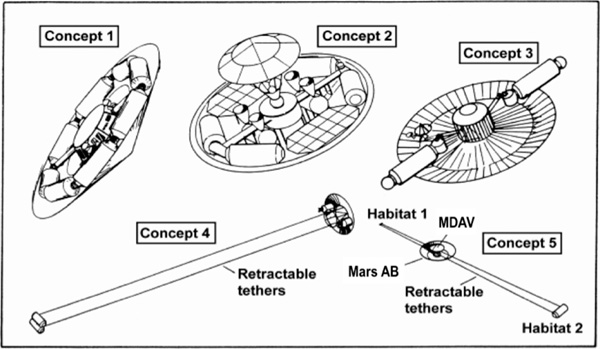
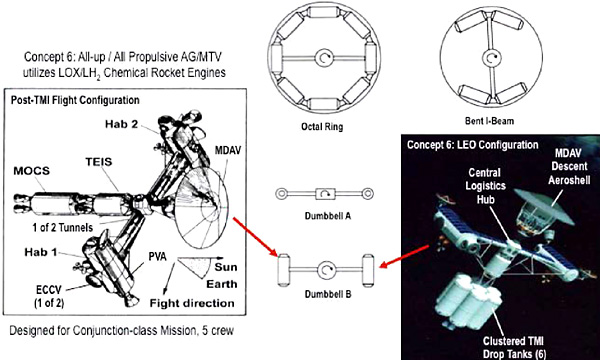
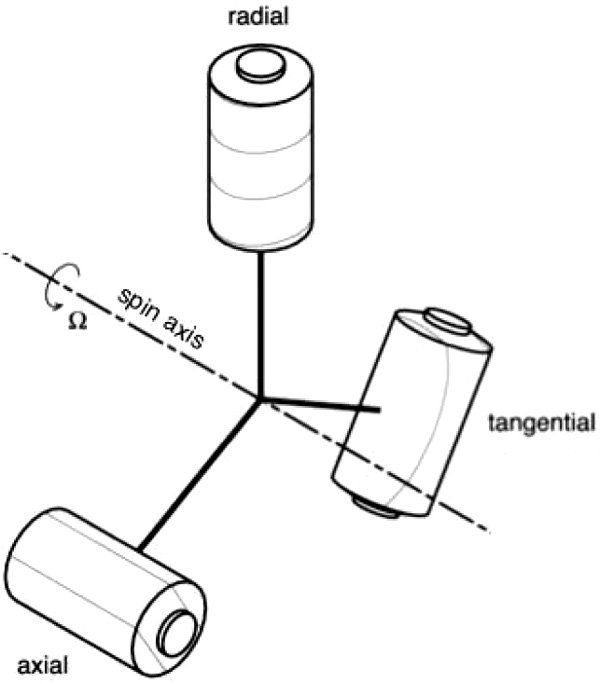

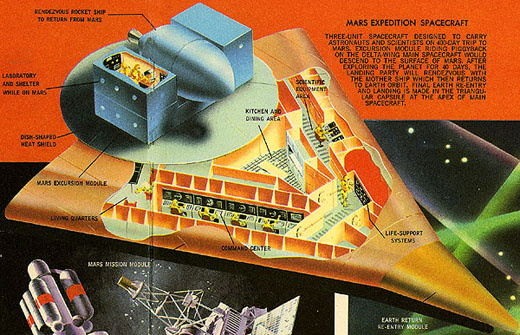
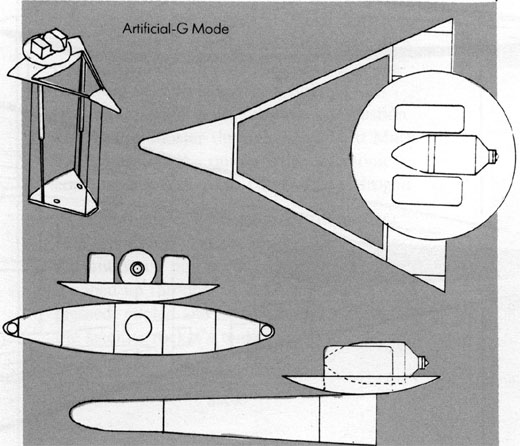


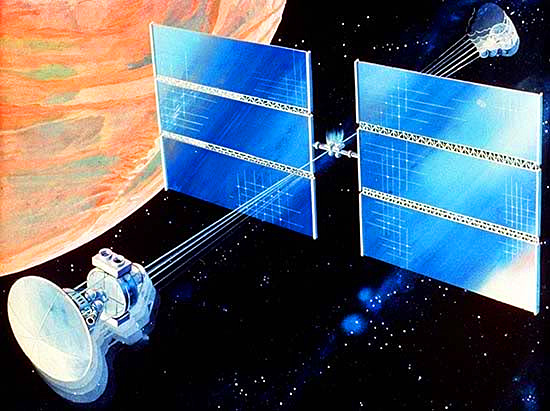


























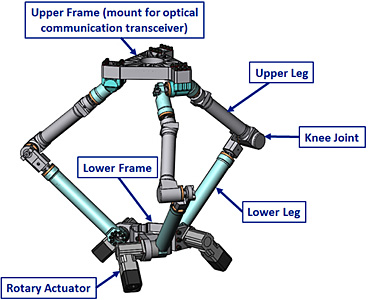
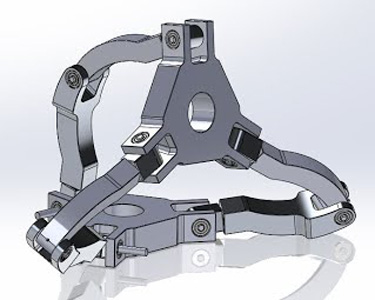

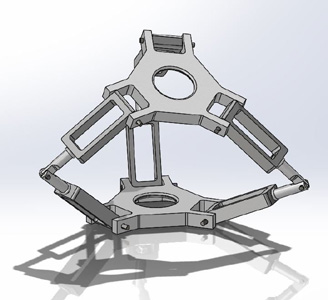
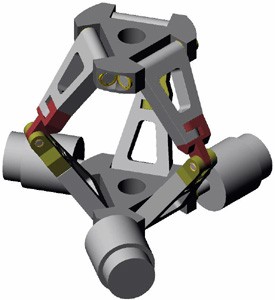
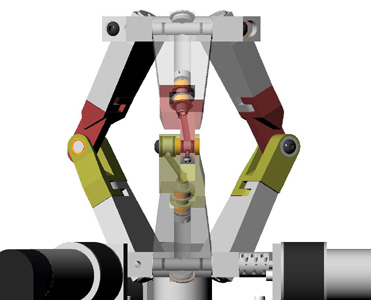
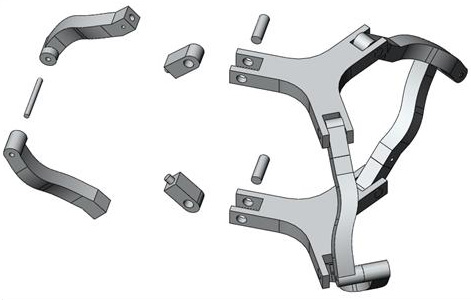
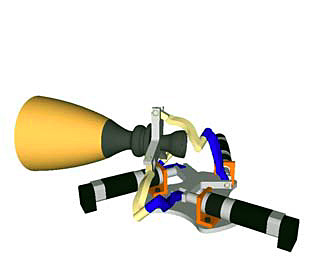
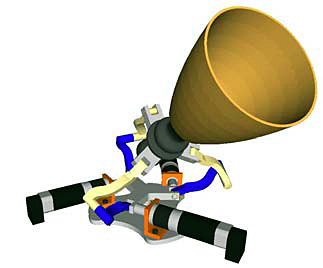
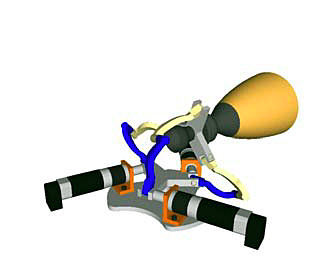
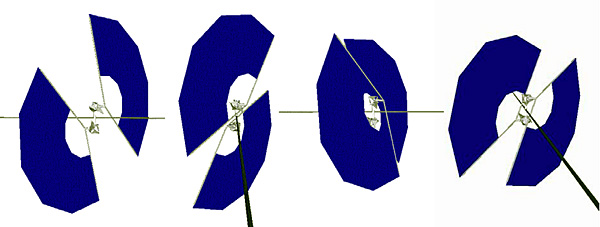
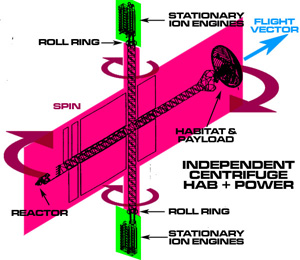
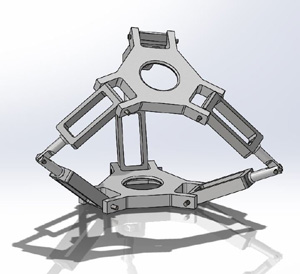

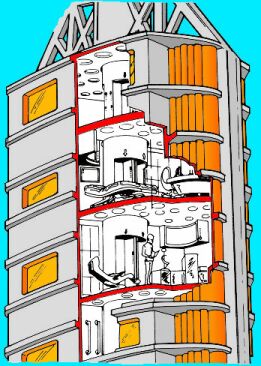
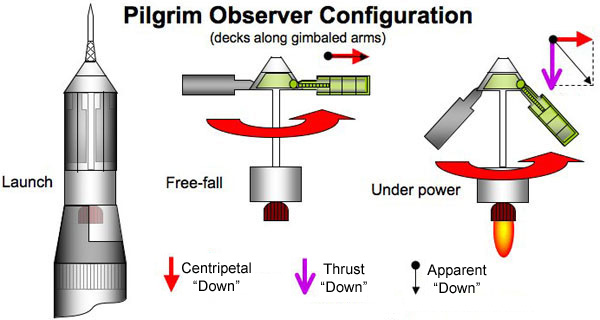






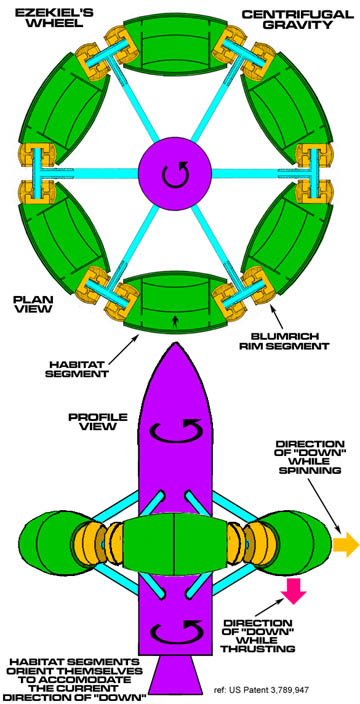
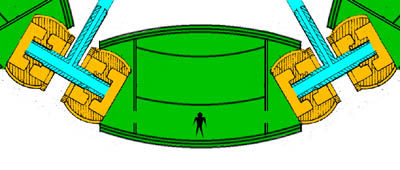
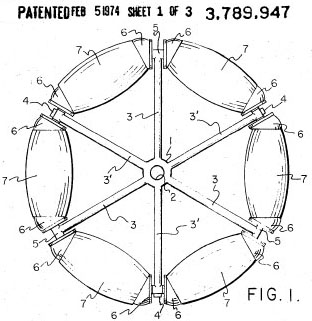
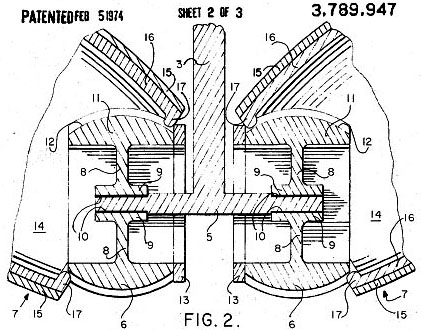
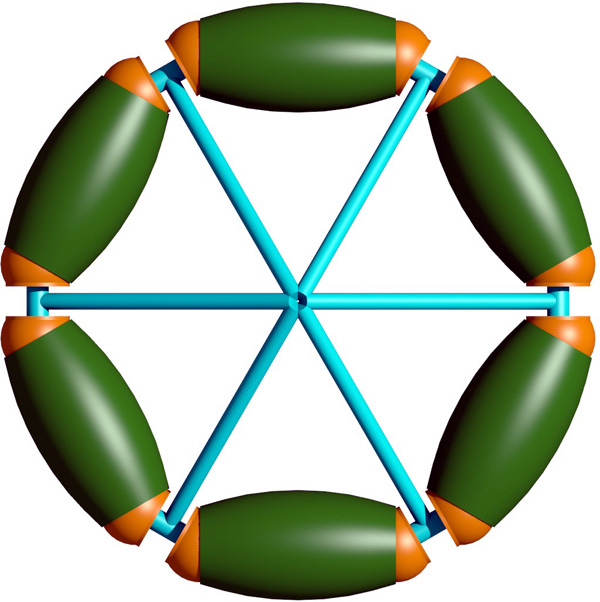
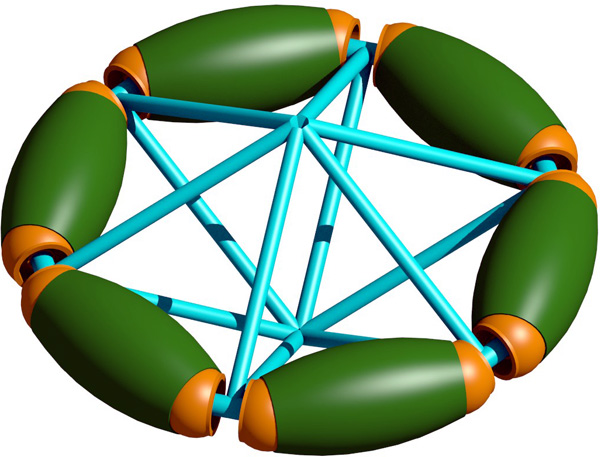
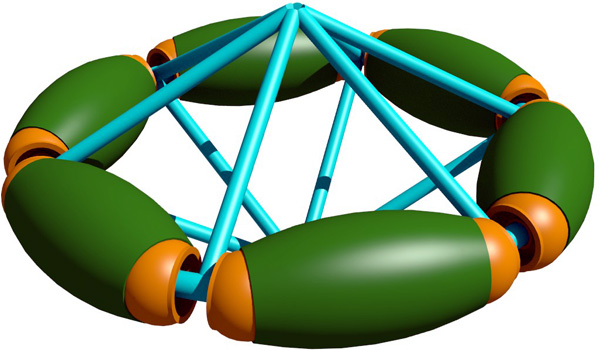
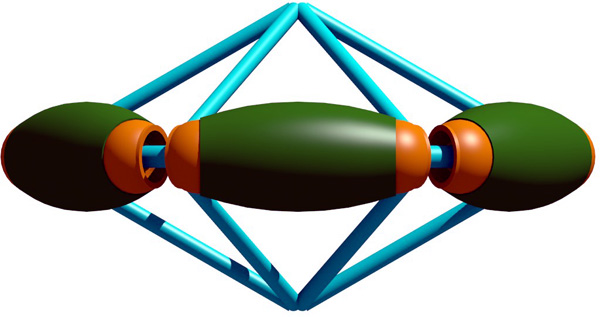
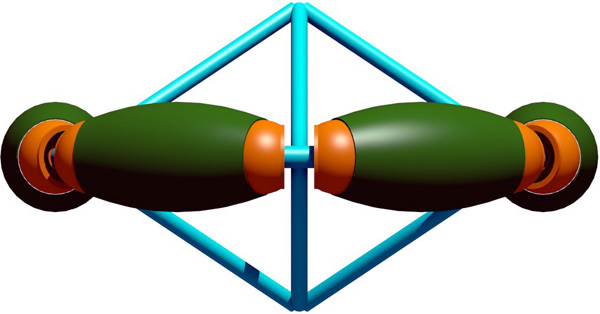
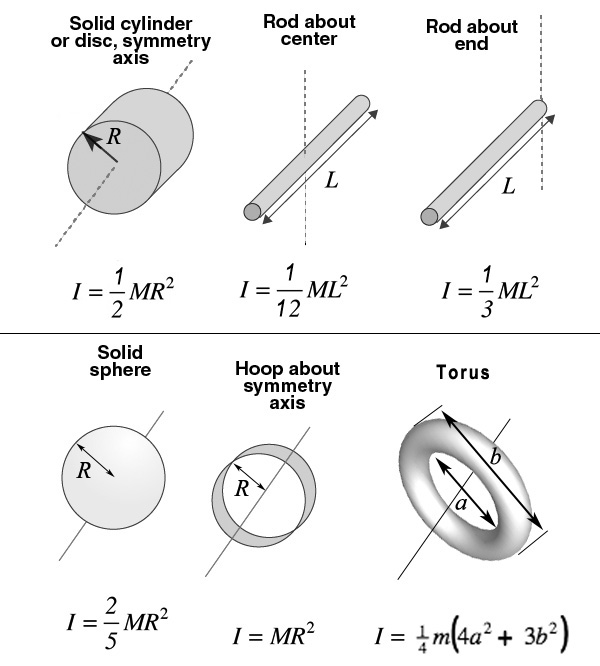
 Moment of Inertia Equations
Moment of Inertia Equations