Ask anybody taking airplane piloting lessons and they'll tell you that taking off is easy, the incredibly hard part is landing. At least landing safely, any fool can land by augering in. Or what Rob Davidoff calls "lithobraking into a low-altitude synchronous orbit."
Naturally this is an order of magnitude harder when doing a tailsitting rocket (Vertical takeoff, vertical landing or VTVL) landing, which is basically a controlled crash. Try playing a few games of Lunar Lander to get a feel for it.
It was the SDIO that built DC/X and flew it many times. General Graham, Max Hunter, and I talked the head of SDIO (VP Dan Quayle in his capacity as Chairman of the National Space Council) into building the DC/X. It flew straight up, moved sideways, and landed on a tail of fire just as God and Robert Heinlein intended rockets to do.
Video of SpaceX test of Falcon Heavy, Feb 6, 2018
with the instantly iconic dual rocket landings that brought a tear to my eye click to play video
Aerobraking Landing
The poor man's way of landing on a planet with an atmosphere is by utilizing aerobraking and aerocapture. Pretty much all of NASA's manned rockets use this method. What you do is equip your spacecraft with a streamlined heat shield (technical term is "aeroshell"), and use air friction to eliminate your deltaV. Hopefully you can reduce the deltaV to zero before you run out of either heat shield (i.e., "burning up in re-entry") or altitude (i.e., "auger in").
The advantage is that it allows landing without requiring a powerful engine (which is a problem with tiny landing boats or inhabitants with strict laws about nuclear radiation) and the elimination of quite a bit of required reaction mass.
The disadvantage is there is a limit to the deltaV that can be shed, your trajectory has to be incredibly on course, and only very few planets and moons in our solar system have atmospheres. Not to mention the fact that most heat shields have to be replaced after each use, which was one of the major drawbacks of the Space Shuttle.
The general rule is that aerobraking can kill a velocity approximately equal to the escape velocity of the planet where the aerobraking is performed(10 km/s for Venus, 11 km/s for Terra, 5 km/s for Mars, 60 km/s for Jupiter).
Robert Zubrin says mass of the heat shield and thermal structure will be about 15% of the total mass being braked. Which sounds like a lot, but is often much less that the reaction mass required to brake with rocket thrust.
The final bit of landing is done by parachute or belly-landing with glider wings like the Space Shuttle. The trouble with a parachute is it drastically limits the size of the spacecraft. The trouble with glider wings is they really eat up your ship's mass budget, and are just dead weight for most of the mission.
The deltaV limit is due to a couple of factors. The faster you shed deltaV, the more heat the heat shield will have to cope with, and there is a limit to the heat shield's ability to cope. There is also a limit to the amount of atmosphere you can pass through with a given trajectory, but it is possible to plot clever paths that loop back and pass through the atmosphere repeatably.
Apollo capsule and heat shield.
Your trajectory has to be dead on course. If you are too steep, the generated heat will cause heat shield failure. If you are too shallow, you will ricochet off the atmosphere on a one way trip into the big dark.
Terrestrial planets with atmospheres include Venus, Earth, Mars, Titan, and maybe Pluto. All the gas giants have atmospheres, so much in fact that the pressure will eventually implode your ship. As a side note, aerobraking can be used with gas giants in order to change one's trajectory instead of landing. This was done in the movie 2010, The Year We Make Contact, where they used a ballute as a heat shield.
Aerobraking is the reason that the planet Mercury is the most expensive terrestrial planet to soft-land on, in terms of delta V. All the other planets either have lower gravity or have an atmosphere suitable for aerobraking.
AEROBRAKING
Aerobraking is a spaceflight maneuver that reduces the high point of an elliptical orbit (apoapsis) by flying the vehicle through the atmosphere at the low point of the orbit (periapsis). The resulting drag slows the spacecraft. Aerobraking is used when a spacecraft requires a low orbit after arriving at a body with an atmosphere, and it requires less fuel than does the direct use of a rocket engine.
Method
When an interplanetary vehicle arrives at its destination, it must change its velocity to remain in the vicinity of that body. When a low, near-circular orbit around a body with substantial gravity (as is required for many scientific studies) is needed, the total required velocity changes can be on the order of several kilometers per second. If done by direct propulsion, the rocket equation dictates that a large fraction of the spacecraft mass must be fuel. This in turn means the spacecraft is limited to a relatively small science payload and/or the use of a very large and expensive launcher. Provided the target body has an atmosphere, aerobraking can be used to reduce fuel requirements. The use of a relatively small burn allows the spacecraft to be captured into a very elongated elliptic orbit. Aerobraking is then used to circularize the orbit. If the atmosphere is thick enough, a single pass through it can be sufficient to slow a spacecraft as needed. However, aerobraking is typically done with many orbital passes through a higher altitude, and therefore thinner region of the atmosphere. This is done to reduce the effect of frictional heating, and because unpredictable turbulence effects, atmospheric composition, and temperature make it difficult to accurately predict the decrease in speed that will result from any single pass. When aerobraking is done in this way, there is sufficient time after each pass to measure the change in velocity and make any necessary corrections for the next pass. Achieving the final orbit using this method takes a long time (e.g., over six months when arriving at Mars), and may require several hundred passes through the atmosphere of the planet or moon. After the last aerobraking pass, the spacecraft must be given more kinetic energy via rocket engines in order to raise the periapsis above the atmosphere.
The kinetic energy dissipated by aerobraking is converted to heat, meaning that a spacecraft using the technique needs to be capable of dissipating this heat. The spacecraft must also have sufficient surface area and structural strength to produce and survive the required drag, but the temperatures and pressures associated with aerobraking are not as severe as those of atmospheric reentry or aerocapture. Simulations of the Mars Reconnaissance Orbiter aerobraking use a force limit of 0.35 N per square meter with a spacecraft cross section of about 37 m², equate to a maximum drag force of about 7.4 N, and a maximum expected temperature as 340 °F (170 °C). The force density (i.e. pressure), roughly 0.2 N (0.04 lbf) per square meter, that was exerted on the Mars Observer during aerobraking is comparable to the aerodynamic resistance of moving at 0.6 m/s (2.16 kph, or 1.34 mph) at sea level on Earth, approximately the amount experienced when walking slowly.
Related methods
Aerocapture is a related but more extreme method in which no initial orbit-injection burn is performed. Instead, the spacecraft plunges deeply into the atmosphere without an initial insertion burn, and emerges from this single pass in the atmosphere with an apoapsis near that of the desired orbit. Several small correction burns are then used to raise the periapsis and perform final adjustments. This method was originally planned for the Mars Odyssey orbiter, but the significant design impacts proved too costly.
Another related technique is that of aerogravity assist, in which the spacecraft flies through the upper atmosphere and utilises aerodynamic lift instead of drag at the point of closest approach. If correctly oriented, this can increase the deflection angle above that of a pure gravity assist, resulting in a larger delta-v.
Aerobraking in fiction
In Robert A. Heinlein's 1948 novel Space Cadet, aerobraking is used to save fuel while slowing the spacecraft Aes Triplex for an unplanned extended mission and landing on Venus, during a transit from the Asteroid Belt to Earth.
In the fourth episode of Stargate Universe, the Ancient ship Destiny suffers an almost complete loss of power and must use aerobraking to change course. The episode ends in a cliffhanger with Destiny headed directly toward a star.
In the space simulation sandbox game Kerbal Space Program, this is a common method of reducing a craft's orbital speed. It is sometimes humorously referred to as "aerobreaking", because the high drag sometimes causes large crafts to split in several parts.
In the 2014 film Interstellar, astronaut pilot Cooper uses aerobraking to save fuel and slow the spacecraft Ranger upon exiting the wormhole to arrive in orbit above the first planet.
Aerocapture uses a planet’s or moon’s atmosphere to accomplish a quick, near-propellantless orbit capture to place a space vehicle in its science orbit (most science orbits require a near circular orbit around the celestial body). The aerocapture maneuver starts as the spacecraft enters the atmosphere of the target body from an approach trajectory. The aerodynamic drag generated by the dense atmosphere slows the craft. After the spacecraft slows enough to capture into orbit, it exits the atmosphere and executes a small motor firing to circularize the orbit. This nearly fuel-free method of deceleration could significantly reduce the mass of an interplanetary spacecraft. Less spacecraft mass allows for more science instrumentation to be added to the mission or allows for a smaller and less-expensive spacecraft, and potentially a smaller, less-expensive launch vehicle.However, this approach requires significant thermal protection and precision closed-loop guidance during the maneuver. This level of control authority requires either the production of significant lift, or relatively large attitude control thrusters.
Benefits of aerocapture
NASA technologists are developing ways to place robotic space vehicles into long-duration scientific orbits around distant Solar System destinations without the need for the heavy fuel loads that have historically limited vehicle performance, mission duration, and mass available for science payloads.
A study showed that using aerocapture over the next best method (propellant burn and aerobraking) would allow for a significant increase in scientific payload for missions ranging from Venus (79% increase) to Titan (280% increase) and Neptune (832% increase). Additionally, the study showed that using aerocapture technology could enable scientifically useful missions to Jupiter and Saturn.
Aerocapture technology has also been evaluated for use in manned Mars missions and found to offer significant mass benefits. For this application, however, the trajectory must be constrained to avoid excessive deceleration loads on the crew. Although there are similar constraints on trajectories for robotic missions, the human limits are typically more stringent, especially in light of the effects of prolonged microgravity on acceleration tolerances.
Aerocapture spacecraft designs
The aerocapture maneuver can be accomplished with three basic types of systems. The spacecraft can be enclosed by a structure covered with thermal protection material also known as the rigid aeroshell design. Similarly another option is for the vehicle to deploy an aerocapture device, such as an inflatable heat shield, known as the inflatable aeroshell design. The third major design option is of an inflatable, trailing ballute—a combination balloon and parachute made of thin, durable material towed behind the vehicle after deployment in the vacuum of space.
Blunt body, rigid aeroshell design
The blunt body, rigid aeroshell system encases a spacecraft in a protective shell. This shell acts as an aerodynamic surface, providing lift and drag, and provides protection from the intense heating experienced during high-speed atmospheric flight. Once the spacecraft is captured into orbit, the aeroshell is jettisoned.
NASA has used blunt aeroshell systems in the past for atmospheric entry missions. The most recent example is the Mars Exploration Rovers, Spirit and Opportunity, which launched in June and July 2003, and landed on the Martian surface in January 2004. Another example is the Apollo Command Module. The module was used for six unmanned space flights from February 1966 to April 1968 and eleven manned missions from Apollo 7 in October 1968 through the final manned Apollo 17 lunar mission in December 1972. Because of its extensive heritage, the aeroshell system design is well understood. Adaptation of the aeroshell from atmospheric entry to aerocapture requires mission-specific customization of the thermal protection material to accommodate the different heating environments of aerocapture. Also, higher-temperature adhesives and lightweight, high temperature structures are desired to minimize the mass of the aerocapture system.
Inflatable aeroshell design
The inflatable aeroshell design looks much like the aeroshell or blunt body design. The inflatable aeroshell is often referred to as a hybrid system, with a rigid nosepiece and an inflated, attached decelerator to increase the drag area. Just prior to entering the atmosphere, the inflatable aeroshell extends from a rigid nose-cap and provides a larger surface area to slow the spacecraft down. Made of thin-film material and reinforced with a ceramic cloth, the inflatable aeroshell design could offer many of the same advantages and functionality as trailing ballute designs. While not as large as the trailing ballute, the inflatable aeroshell is roughly three times larger than the rigid aeroshell system and performs the aerocapture maneuver higher in the atmosphere, reducing heating loads. Because the system is inflatable, the spacecraft is not enclosed during launch and cruise, which allows more flexibility during spacecraft design and operations.
Trailing ballute design
One of the primary inflatable deceleration technologies is a trailing ballute configuration. The design features a toroidal, or donut-shaped, decelerator, made of a lightweight, thin-film material. The ballute is much larger than the spacecraft and is towed behind the craft, much like a parachute, to slow the vehicle down. The “trailing” design also allows for easy detachment after the aerocapture maneuver is complete. The trailing ballute design has performance advantages over the rigid aeroshell design, such as not constraining the spacecraft size and shape, and subjecting the vehicle to much lower aerodynamic and thermal loads. Because the trailing ballute is much larger than the spacecraft, aerocapture occurs high in the atmosphere where much less heat is generated. The ballute incurs most of the aerodynamic forces and heat, allowing the use of minimal thermal protection around the spacecraft. One of the primary advantages of the ballute configuration is mass. Where the rigid aeroshell may account for 30–40% of the mass of a spacecraft, the ballute mass fraction could be as little as 8–12%, saving mass for more science payload.
In practice
Aerocapture has not yet been tried on a planetary mission, but the re-entry skip by Zond 6 and Zond 7 upon lunar return were aerocapture maneuvers, since they turned a hyperbolic orbit into an elliptical orbit. On these missions, since there was no attempt to raise the perigee after the aerocapture, the resulting orbit still intersected the atmosphere, and re-entry occurred at the next perigee.
Aerocapture was originally planned for the Mars Odyssey orbiter, but later changed to aerobraking for reasons of cost and commonality with other missions.
Aerocapture has been proposed and analyzed for arrival at Saturn's moon Titan.
In fiction
Aerocapture within fiction can be read in Arthur C. Clarke's novel 2010: Odyssey Two, in which two spacecraft (one Russian, one Chinese) both use aerocapture in Jupiter's atmosphere to shed their excess velocity and position themselves for exploring Jupiter's satellites. This can be seen as a special effect in the movie version in which only a Russian spacecraft undergoes aerocapture (in the film incorrectly called aerobraking).
Players of the video game Kerbal Space Program often employ aerocapture when exploring the satellites of Jool (a gas giant that serves as the game's analogue to Jupiter).
Related methods
Aerocapture is part of a unique family of "aeroassist" technologies being developed by NASA for science missions to any planetary body with an appreciable atmosphere. These destinations could include Mars, Venus and Saturn's moon Titan, along with the outer planets.
Aerobraking is another aeroassist maneuver that shares some similarities but also some key marked differences with Aerocapture. Aerobraking also uses the celestial body’s atmosphere to slow the aircraft down into the desired orbit however unlike aerobraking aerocapture only uses one pass through the atmosphere to reduce its velocity while aerobraking takes on the order of 100 to 400 passes to achieve the desired velocity reduction.
Aerocapture:
• Rapid process (hours to days)
• Descent into a relatively dense mid-atmosphere
• Requires a heavy heat shield due to rapid deceleration resulting in high g-forces
Aerobraking:
• Gradual process (weeks to months)
• Descent into sparse outer atmosphere
• Small reductions in spacecraft velocity per pass thus no additional mass for a heat shield is necessary
One of the main advantages of using an aerocapture technique over that of an aerobraking technique is that it enables mission concepts for human spaceflight due to the rapid process of transitioning to the desired orbit.
An aerogravity assist, or AGA, is a theoretical spacecraft maneuver designed to change velocity when arriving at a body with an atmosphere. A pure gravity assist uses only the gravity of a body to change the direction of the spacecraft trajectory. The change in direction is limited by the mass of the body, and how closely it can be approached. An aerogravity assist uses a closer approach to the planet, dipping into the atmosphere, so the spacecraft can also use aerodynamic lift with upside-down wings to augment gravity and further curve the trajectory. This enables the spacecraft to deflect through a larger angle, resulting in a higher delta-v (change in velocity). This in turn allows a shorter travel time, a larger payload fraction of the spacecraft, or a smaller spacecraft for a given payload.
The related techniques of aerocapture, aerobraking, and atmospheric entry also attempt to use the body's atmosphere to help reduce propulsion requirements. In an aerogravity assist, however, the goal is not to use the atmosphere to slow the spacecraft down, but instead use it to achieve a larger change in direction.
Aerogravity assists, though proposed in theory, have not yet been used in practice.
Boost-glide trajectories are a class of spacecraft guidance and reentry trajectories that extend the range of suborbital spaceplanes and reentry vehicles by employing aerodynamic lift in the high upper atmosphere. In most examples, boost-glide roughly doubles the range over the purely ballistic trajectory. In others, a series of skips allows range to be further extended, and leads to the alternate terms skip-glide and skip reentry.
The concept was first seriously studied as a way to extend the range of ballistic missiles, but has not been used operationally in this form. The underlying aerodynamic concepts have been used to produce maneuverable reentry vehicles, or MARV, to increase the accuracy of some missiles. More recently the traditional form with an extended gliding phase has been considered as a way to reach targets while flying below their radar coverage.
The concept has also been used to extend the reentry time for vehicles returning to Earth from the Moon, who would otherwise have to shed a large amount of velocity in a short time and thereby suffer very high heating loads. The Apollo Command Module used what is essentially a one-skip reentry (or partial skip), as did the Soviet Zond and Chinese Chang'e 5-T1. More complex multi-skip reentry is proposed for newer vehicles like the Orion spacecraft.
History
Early concepts
The earliest known use of the boost-glide concept for truly long-range use dates to the 1941 Silbervogel proposal by Eugen Sänger for a rocket powered bomber able to attack New York City from bases in Germany and then fly on for landing somewhere in the Pacific Ocean held by the Empire of Japan. The idea would be to use the vehicle's wings to generate lift and pull up into a new ballistic trajectory, exiting the atmosphere again and giving the vehicle time to cool off between the skips. It was later demonstrated that the heating load during the skips was much higher than initially calculated, and would have melted the spacecraft.
In 1943, the A-9 work was dusted off again, this time under the name A-4b. It has been suggested this was either because it was now based on an otherwise unmodified A-4, or because the A-4 program had "national priority" by this time, and placing the development under the A-4 name guaranteed funding. A-4b used swept wings in order to extend the range of the V2 enough to allow attacks on UK cities in The Midlands or to reach London from areas deeper within Germany. The A-9 was originally similar, but later featured long ogive delta shaped wings instead of the more conventional swept ones. This design was adapted as a manned upper stage for the A-9/A-10 intercontinental missile, which would glide from a point over the Atlantic with just enough range to bomb New York before the pilot bailed out.
Post-war development
In the immediate post-war era, Soviet rocket engineer Alexey Isayev found a copy of an updated August 1944 report on the Silbervogel concept. He had the paper translated to Russian, and it eventually came to the attention of Joseph Stalin who was intensely interested in the concept of an antipodal bomber. In 1946, he sent his son Vasily Stalin and scientist Grigori Tokaty, who had also worked on winged rockets before the war, to visit Sänger and Irene Bredt in Paris and attempt to convince them to join a new effort in the Soviet Union. Sänger and Bredt turned down the invitation.
In November 1946, the Soviets formed the NII-1 design bureau under Mstislav Keldysh to develop their own version without Sänger and Bredt. Their early work convinced them to convert from a rocket powered hypersonic skip-glide concept to a ramjet powered supersonic cruise missile, not unlike the Navaho being developed in the United States during the same period. Development continued for a time as the Keldysh bomber, but improvements in conventional ballistic missiles ultimately rendered the project unnecessary.
In the United States, the skip-glide concept was advocated by many of the German scientists who moved there, primarily Walter Dornberger and Krafft Ehricke at Bell Aircraft. In 1952, Bell proposed a bomber concept that was essentially a vertical launch version of Silbervogel known as Bomi. This led to a number of follow-on concepts during the 1950s, including Robo, Hywards, Brass Bell, and ultimately the Boeing X-20 Dyna-Soar. Earlier designs were generally bombers, while later models were aimed at reconnaissance or other roles. Dornberger and Ehricke also collaborated on a 1955 Popular Science article pitching the idea for airliner use.
The introduction of successful intercontinental ballistic missiles (ICBMs) in the offensive role ended any interest in the skip-glide bomber concepts, as did the reconnaissance satellite for the spyplane roles. The X-20 space fighter saw continued interest through the 1960s, but was ultimately the victim of budget cuts; after another review in March 1963, Robert McNamara canceled the program in December, noting that after $400 million had been spent they still had no mission for it to fulfill.
The technique was used by the Soviet Zond series of circumlunar spacecraft, which used one skip before landing. In this case a true skip was required in order to allow the spacecraft to reach the higher-latitude landing areas. Zond 6, Zond 7 and Zond 8 made successful skip entries, although Zond 5 did not. The Chang'e 5-T1, which flew mission profiles similar to Zond, also used this technique.
The Apollo Command Module used a skip-like concept to lower the heating loads on the vehicle by extending the re-entry time, but the spacecraft did not leave the atmosphere again and there has been considerable debate whether this makes it a true skip profile. NASA referred to it simply as "lifting entry". A true multi-skip profile was considered as part of the Apollo Skip Guidance concept, but this was not used on any manned flights. The concept continues to appear on more modern vehicles like the Orion spacecraft, using onboard computers.
Flight mechanics
Using simplified equations of motion and assuming that during the atmospheric flight both drag and lift forces will be much larger than the gravity force acting on the vehicle, the following analytical relations for a skip reentry flight can be derived:
Where gamma is the flight path angle relative to the local horizontal, the subscript E indicates the conditions at the start of the entry and the subscript F indicates the conditions at the end of the entry flight.
The velocity V before and after the entry can be derived to relate as follows:
This mostly true story is about the Space Shuttle payload bay doors and what to do if they won’t shut properly. And how we forgot about that emergency in our rush to achieve other mission objectives.
Some months ago, I visited Atlantis at the Kennedy Space Center visitor center. Superbly displayed, it is the only shuttle vehicle with the payload bay doors open. In the picture you can see some of the rube-goldberg mechanism that operates the doors critical latches to ensure the doors don’t spring open during aerodynamic flight. A set of push rods and hinges at the sill open and close the doors. A long set of push rod/bell crank mechanisms located in the front and rear edges of the doors operate the latch mechanisms. On the bulkhead just aft of the crew cabin you can see the black cylindrical knobs which the latch mechanisms grab onto to secure the door in place. More latches and their mechanisms ran down the centerline of the doors. If this sounds complicated, it is.
Early in the shuttle days there was a huge concern about what to do if the doors did not close and latch properly at the end of the mission. The doors had to be open during most of the orbit stay time for cooling and to allow satellite deployments or other objectives. But during re-entry and the atmospheric part of the flight, the doors had to be firmly shut and latched down. If they were to spring open and rip off, the vehicle would become uncontrollable and catastrophe would ensue. Flight rules prohibited deorbit with any more than one set of latches not closed; and in that case the aerodynamic maneuvers were to be severely restricted.
Of course, the power to the motors that drove all this mechanism were redundant but that did nothing for a physical jam. During STS-3 a thermal engineering test caused the doors to become banana shaped and prevented – for a short time – closing the doors. This was done on purpose to see what the limits of the spacecraft were. We found out. And never did it again.
Long before STS-1 flew, a set of procedures for a spacewalking crewmember to deal with potential problems was developed and practiced. I got my opportunity to take the class; use the tube cutters to cut a pushrod that had jammed, put clamps around unclosed latches to hold doors tight, and more. There was a whole set of tools flown on every shuttle flight to deal with this contingency and every crew got at least one practice session on how to deal with it.
But the trick is that a space suited crewmember must get to the doors from the inside. Normally this is not a problem; with an empty or near empty payload bay the EV crewmember just translates to the worksite; latches everything down, returns to the airlock door and ingresses. Oh, and quickly gets out of the EVA suit and into the Launch/Reentry Suit and straps down because deorbit must occur shortly after the doors are closed and the radiators can no longer cool the ship.
If a payload blocked the path from the EVA worksite to the airlock, early in the program they were always jettisonable. Not a problem.
Despite the complicated design, the payload bay door and latch mechanisms worked perfectly on every mission. Over time, the concerns about having to deal with a failure faded away, even though the procedure and tools were on every flight.
During the evolution of the shuttle design, the European Space Agency built a laboratory to fit in the shuttle payload bay. You can see the SpaceLab module on display right behind Discovery at the Smithsonian Udvar-Hazy center in Virginia. Before the ISS, this was a facility to do micro-gravity research for up to three weeks in space.
But there is a trick that the designers missed.
If the mechanism on one of the aft payload bay door latches failed, and an EVA crewmember had to go back there to secure the doors down, there was no way for that crew member to squeeze past the SpaceLab module to get to the airlock with the payload bay doors closed. Jettisoning the SpaceLab was not a task that an EVA crewmember could do. The way home was going to be blocked.
Oops.
It may have been the first SpaceLab mission when we discovered this, but my recollection is that it was uncovered later, during a simulated mission. Those darn Sim Sups! They always made us work problems that were unrealistic! Except that most of the time they weren’t.
What to do? No more SpaceLab flights? Unacceptable.
Review the risk? Great history of reliability, low likelihood of needing to do the EVA. Case closed? Not exactly.
What if?
Here is the crazy resolution. If the aft latches had to be secured on a SpaceLab flight, then the crewmember would just stay back there.
There was a good place to strap down at the bottom of the payload bay aft of the SpaceLab module. It would be a short wait from finishing up with the doors until the deorbit burn, probably no more than an hour and a half. From deorbit burn to the ground was about an hour and in normal flight the g loading was light, nothing more than 1.5g. The EMU had plenty of consumables to work for the necessary time, but there are a couple of sticky things to resolve:
The EMU uses a water sublimator to keep the crewmember cool. As the payload bay repressurizes during entry, the sublimator will quit. If the crewmember had selected full cool and chilled down as much as he/she could stand, it would probably be OK.
Getting out of the spacesuit: after landing, getting out of the helmet and gloves is not a problem. Getting out of the hard upper torso by oneself is a chore but probably doable in 1 g if one is not in a hurry. The lower pressure garment (pants) would not be a problem.
Getting the crewmember out of the payload bay, well that is a problem. Remember the doors are latched shut and clamps have been applied to keep them shut. Surely the ground crew could figure something out . . . given several hours . . . .
So that is the story. Accept the risk because we think it is low; have a screwy contingency procedure ready if we’re wrong.
But that is not the way you really want to fly in space.
On 2 December 1988, Space Shuttle Orbiter Atlantis lifted off the pad at Kennedy Space Center on a classified Department of Defense mission. 85 seconds after launch, some ablative insulation fell off the right-hand solid rocket booster and struck the orbiter. The crew reported white material on the windshield at multiple points during ascent. Once on orbit, the crew used Atlantis’ Canadarm to observe the right wing of the orbiter, and were shocked to discover that large portions of the heat tiles were damaged, but with the low resolution camera on the Canadarm, they couldn’t see the full extent of the damage.
“I will never forget, we hung the arm over the right wing, we panned it to the location and took a look and I said to myself, ‘we are going to die,’” recalled legendary shuttle commander Robert ‘Hoot’ Gibson. “There was so much damage. I looked at that stuff and I said, 'oh, holy smokes, this looks horrible, this looks awful.’“ Due to the classified nature of the mission, the crew couldn’t use the standard method sending images and video back down to Mission Control, so they were forced to use slow, encrypted transmissions. NASA engineers received poor quality images, leading them to believe that the damage was just lights and shadows. The crew was told that the damage to the orbiter was no worse than any other mission.
Understandably, the crew (particularly Commander Gibson) was furious. Gibson, assuming that his life was in danger, decided that if instruments showed that the orbiter were actually braking up on reentry, he’d have ‘at least 60 seconds to tell Mission Control what he thought of their analysis.’ The day before reentry, Gibson and the crew spent time sightseeing, with Gibson saying that there was ‘no reason to die all tensed up.’ Thankfully, the orbiter actually reentered that atmosphere and successfully landed at Edwards Air Force Base on 6 December 1988, after 4 days, 9 hours, 5 minutes, and 37 seconds. It wasn’t until the orbiter came to a stop that NASA, and the crew of STS-27, realized the extent of the damage.
Over 700 tiles were damaged, with one tile missing entirely. The tile was missing over the steel plate that an antenna was mounted on, so a complete burn-through didn’t happen. It was an extremely close call for Atlantis and her crew.
A very similar event would happen during STS-107′s 16 January 2003 launch, when a piece of the External Tank’s foam dislodged and struck the Space Shuttle Orbiter Columbia. The crew, however, were not so lucky, and the orbiter broke up during reentry. Rick Husband, William McCool, David Brown, Kalpana Chawla, Michael Anderson, Laurel Clark, and Ilan Ramon perished aboard Columbia.
I don’t think any of us really trusted the Nerva-K under our landing craft.
Think it through. For long trips in space, you use an ion jet giving low thrust over long periods of time. The ion motor on our own craft had been decades in use.
Where gravity is materially lower than Earth’s, you land on dependable chemical rockets. For landings on Earth and Venus, you use heat shields and the braking power of the atmosphere. For landing on the gas giants—but who would want to?
The Nerva-class fission rockets are used only for takeoff from Earth, where thrust and efficiency count. Responsiveness and maneuverability count for too much during a powered landing. And a heavy planet will always have an atmosphere for braking.
Pluto didn’t.
For Pluto, the chemical jets to take us down and bring us back up were too heavy to carry all that way. We needed a highly maneuverable Nerva-type atomic rocket motor using hydrogen for reaction mass.
And we had it. But we didn’t trust it.
(ed note: though as it turns out, Mercury has about six times the surface gravity of Pluto, and Mercury also does not have an atmosphere for braking. When this story was written it was thought that Pluto had a much higher gravity)
Three-view sketch of proposed reentry vehicle with extendable leading edge heat shield.
...From the outside there was no evidence of damage or repair. Part of the heat shield hung below the cutter's nose like a great shovel blade, exposing the control room blister, windows, and the snout of the cutter's main armament: a laser cannon...
...The starboard air lock had been reconnected to the embassy ship. They left by the port side. Lenin's boat crew had already rigged lines from the auxiliary vessel to the cutter. The boat was almost a twin for MacArthur's cutter, a flat-topped lifting body with a shovel-blade reentry shield hanging below the nose...
From The Mote in God's Eye by Larry Niven and Jerry Pournelle (1975)
Ballute shield inflating
Ballute shield inflating
Leonov starts braking.
Diagram of Leonov's ballute shield.
Leonov braking.
2010: ODYSSEY TWO
Terrified Zenia and Floyd
In the hours immediately before encounter, Floyd saw little of captain or navigator. The Orlovs scarcely left the bridge, as they continually checked the approach orbit and made minute refinements to Leonov's course. The ship was now on the critical path that would just graze the outer atmosphere; if it went too high, frictional braking would not be sufficient to slow it down, and it would go racing out of the Solar System, beyond all possibility of rescue. If it went too low, it would burn up like a meteor. Between the two extremes lay little margin for error. And it was too late for second thoughts. From far, far away came the first faint whisper of sound, like the wailing of some lost soul. At the same moment, the ship gave a barely perceptible jerk; the cocoon began to swing around and its suspension tightened. After weeks of weightlessness, gravity was returning. Within seconds, the faint wail had risen to a steady roar, and the cocoon had become an overloaded hammock. This is not such a good idea, Floyd thought to himself, already it was difficult to breathe. The deceleration was only a part of the problem: Zenia was clutching him as a drowning person is supposed to clutch the proverbial straw. The ship was now rocking noticeably, like a small boat in a choppy sea. Was that normal? wondered Floyd. He was glad that he had Zenia to worry about; it took his mind away from his own fears. Just for a moment, before he managed to expel the thought, he had a vision of the walls suddenly glowing cherry red, and caving in upon him. Like the nightmare fantasy of Edgar Allan Poe's 'The Pit and the Pendulum', which he'd forgotten for thirty years. But that would never happen. If the heat shield failed, the ship would crumble instantly, hammered flat by a solid wall of gas. There would be no pain; his nervous system would not have time to react before it ceased to exist. He had experienced more consoling thoughts, but this one was not to be despised. When Floyd reached the observation deck — a discreet few minutes after Zenia — Jupiter already seemed farther away. But that must be an illusion based on his knowledge, not the evidence of his eyes. They had barely emerged from the Jovian atmosphere, and the planet still filled half the sky. And now they were — as intended — its prisoners. During the last incandescent hour, they had deliberately jettisoned the excess speed that could have carried them right out of the Solar System, and on to the stars. Now they were travelling in an ellipse — a classical Hohmann orbit — which would shuttle them back between Jupiter and the orbit of Io, 350,000 kilometres higher. If they did not — or could not — fire their motors again, Leonov would swing back and forth between these limits, completing one revolution every nineteen hours. It would become the closest of Jupiter's moons — though not for long. Each time it grazed the atmosphere it would lose altitude, until it spiralled into destruction.
Floyd had never really enjoyed vodka, but he joined the others without any reservations in drinking a triumphant toast to the ship's designers, coupled with a vote of thanks to Sir Isaac Newton. Then Tanya put the bottle firmly back in its cupboard; there was still much to be done. Though they were all expecting it, everyone jumped at the sudden muffled thud of explosive charges, and the jolt of separation. A few seconds later, a large, still-glowing disk floated into view, slowly turning end-over-end as it drifted away from the ship. 'Look!' cried Max. 'A flying saucer! Who's got a camera?' There was a distinct note of hysterical relief in the laughter that followed. It was interrupted by the captain, in a more serious vein. 'Goodbye, faithful heat shield! You did a wonderful job.' 'But what a waste!' said Sasha. 'There's at least a couple of tons left, Think of all the extra payload we could have carried!' 'If that's good, conservative Russian engineering,' retorted Floyd, 'then I'm all for it. Far better a few tons too much — than one milligram too little.' Everyone applauded those noble sentiments as the jettisoned shield cooled to yellow, then red, and finally became as black as the space around it. It vanished from sight while only a few kilometres away, though occasionally the sudden reappearance of an eclipsed star would betray its presence. 'Preliminary orbit check completed,' said Vasili. 'We're within ten metres a second of our right vector. Not bad for a first try.' There was a subdued sigh of relief at the news, and a few minutes later Vasili made another announcement. 'Changing attitude for course correction; delta vee six metres a second. Twenty-second burn coming up in one minute.'
Dear Caroline: I miss you terribly. The time has come to put ourselves in an orbit around Io, which is where Discovery is. We don't have enough fuel to slow ourselves down, so we are about to use a technique called aerobraking.
The theory is, we will enter the outer layer of Jupiter's atmosphere using what is called a "ballute" for a shield. The atmosphere will slow us down, and Jupiter's gravity will grab hold of us and slingshot us around behind the dark side. If all goes well, we'll wind up in a gentle orbit around Io.
It's dynamite on paper. Of course the people who came up with the numbers on the paper aren't here.
Since no one has ever done this before, everyone up here is as scared as I am. The difference is, they're busy. I have nothing to do but wait for it to happen. I hope this is all worth it.
Gemini TTV-1 Paraglider Capsule National Air and Space Museum Archives, Smithsonian Institution
Heat Shield
Fragment of the heat shield of Gemini VIII. Base is resin-impregnated fiberglass honeycomb and the outer layer of ablative material is fiberglass honeycomb filled with silicone elastomer. Heat is dissipated by ablation—charring and evaporation of the silicone elastomer
To recap: in aerobraking a heat shield is used to convert excess spacecraft velocity into waste heat via atomspheric friction, thus slowing down the spacecraft.
Since there is lots of velocity to get rid of, it turns into lots of heat. A whole lotta heat. 2760 degrees Celsius of heat. We are talking more than enough heat to melt metal.
But the heat shield is build out of materials that can take it. Mostly because the shield ablades away, which puts a limit on how much velocity can be removed before the heat shield is all gone.
However, there is another consideration. Consider a Roman Legionnaire, armed with a sword and a mightly scutum (shield). A smelly barbarian can flail away at your scutum without doing you any harm. Consider though, how well the scutum will protect you if it had a big hole in the middle. The barbarian can stick their sword through the hole and into your heart, sending your ghost into the Elysian Fields. A scutum with a hole in it is worthless.
The same goes for a heat shield with a hole in it. A plume of incandescent atmosphere at 2760°C will shoot through the hole and burn a hole in the hull. Your ship will do an impromptu impression of the Space Shuttle Columbia disaster.
Now NASA's space shuttle did have temporary holes for the shuttle's retractable landing gear, but this had to be precisely engineered. Even then they were weak spots.
For other spacecraft, they would go to extreme lengths to avoid putting holes in the heat shield.
APOLLO HEAT SHIELD
The principal task of the heat shield that forms the
outer structure is to protect the crew from the fiery
heat of entry-heat so intense that it melts most
metals (5,000 ° F). The ablative material that does this job is a
phenolic epoxy resin, a type of reinforced plastic.
This material turns white hot, chars, and then
melts away, but it does it in such a way that the
heat is rejected by the shield and does not penetrate
to the surface of the spacecraft.
The ablative material controls the rate of heat
absorption by charring or melting rapidly. This
dissipates the heat and keeps it from reaching the
inner structure.
The command module enters the atmosphere with
its base down; this is covered by the aft heat shield
which is the thickest portion.
The heat shield varies in thickness: the aft portion
is 2 inches and the crew compartment and forward
portions are ½ inch. Total weight of the shield is
about 3,000 pounds. The heat shield has several
outer coverings: a pore seal, a moisture barrier
(a white reflective coating), and a silver Mylar
thermal coating that looks like aluminum foil.
The gumdrop shaped Command module had a heat shield on its base. The Command module was stacked on top of the Service module. So the heat shield separates teh two modules. The problem is that the Service module supplies the Command module with electrical power, air, water, and coolant. How do you get these vital fluids from one module to the other without poking dangerous holes in the heat shield?
The Command module is green, the Service module is blue.
Power, water, oxygen, and water-glycol (coolant) flows through the yellow umbilical, detouring around the red heat shield.
The faring covering all the feeder lines is about 18 inches wide by 40 inches long click for larger image
Oh, my. There certainly are a lot of feeder lines in the umbilical, are there not?
At the end of its mission, the Command module separates from the Service module. The Command module aerobrakes with its heat shield, delivering the astronauts safely to the landing zone. The Service module burns up in reentry and any remaining fragments fall into the Pacific ocean.
Before the two modules can separate, the umbilical must be cut.
CM-SM CONNECTION
For most of an Apollo mission, the command and service modules are attached; they separate only a short time before the command module enters the atmosphere.
The two modules are connected by three tension ties which extend from the CM's aft heat shield to six compression pads on the top of the SM. The tension ties are essentially stainless steel straps about 2-½ inches wide and 4 inches long bolted at one end to the CM and at the other to the SM. The CM rests base down on the six compression pads, which are circular metal "cups," three of them about 4 inches in diameter and three about 6 inches in diameter. The areas in the heat shield which rest on the pads are reinforced with laminated fiberglass.
The two modules also are connected through the CM-SM umbilical, an enclosure protruding from the CM on the side opposite the side hatch. The umbilical is the wiring and tubing through which vital power, water, oxygen, and water-glycol flows from one module to the other. These connections are covered by an aluminum fairing about 18 inches wide and 40 inches long.
At separation, electrical circuits are deadfaced (power cut off) and valves closed at the umbilical, a guillotine mechanism cuts the connecting wires and tubing, and small charges sever the tension ties. The umbilical firing pulls away from the CM and remains attached to the SM. The guillotine that severs the wires and tubes consists of two stainless steel blades, either one of which will cut all the connections. The guillotine is driven by redundant detonating cord charges. The tension ties are severed by linear-shaped charges set off by detonators. The signals that set off the detonators, the detonators themselves, and the charges are all redundant.
The area between the bottom (aft) of the CM and the top of the SM where the two modules are joined is enclosed by a fairing 26 inches high. This fairing is part of the service module and contains space radiators for the electrical power subsystem.
From CSM06 COMMAND MODULE OVERVIEW
When the time comes for the Command module to separate from the Service module, an explosive charge drives a small guillotine to slice all the various umbilical pipes. There is a back-up charge and back-up gillotine, just in case.
The umbilical is spring-loaded. When cut by the gillotine, the umbilical swings out of the way.
Now, the Command module and Service module are rather firmly bolted together by three rods of solid stainless steel whimsically called "tension tie straps." Because it would be catastrophic if the two modules separated before the scheduled time. They are cut by explosive shaped charges The tie straps are about 2-½ inches wide and 4 inches long. The upper end of each tie strap is bolted to the Command module and the lower end bolted to the Service module.
Oh noes! The tie straps actually penetrate the heat shield! Why isn't this a problem? Let me explain
The blazing heat of reentry would ordinarily melt the steel tie strap. However, since the straps are still attached to the rear bulkhead of the entire freaking Command module, the module acts as a heat sink. This wicks away the heat so the tie straps do not get hot enough to melt. The bulkhead does rise in temperature. But since the heat in the grams of straps is spread out in metric tons of bulkhead, the temperature rise is endurable.
So, why didn't the designers make the entire heat shield out of stainless steel? Well, for starters that would increase the heat shield mass by several orders of magnitude and reduce the payload budget to negative numbers. But secondly since every square centimeter would be expose to enough thermal energy to melt, it would be the functional equivalent of having no heat shield at all. Meaning the Command module (and crew) would burn up in reentry and any remaining fragments would fall into the Pacific ocean.
After the umbilical is cut, the only thing attaching the Command module to the Service module are three tension tie straps. These are cut by explosive shaped charges. The tie straps do penetrate the heat shield, but this does not cause problems (as explained above)
Magnetohydrodynamic Aerobraking
There is some current research into magneto-hydrodynamic force fields as heat shields.
The advantage is you do not have to replace a physical burnt-out heat shield (like the Space Shuttle required), since it is composed of renewable force fields instead of matter.
Disadvantages include the fact that they require electrical power, and that they only work at large velocities. However the latter drawback is not as bad as it seeems. A MHD heat shield can reduce the spacecraft's velocity to the point where a ceramic heat shield can manage the rest of the landing. And ceramic shields do not have to be replaced after each landing.
MHD AEROBRAKING AND THERMAL PROTECTION PART I: INTRODUCTION
I’ve been meaning to write for a while about a rather fascinating, but not very well known, area of research that I think might have significant implications for several areas of space transportation. The research I am referring to is focused on exploiting Magneto-hydrodynamic forces to manipulate weakly-ionized plasmas caused by hypersonic flight in rarefied flows–ie using magnets to shove around the hot flamey stuff caused by slamming into the thin air above us at crazy-high speeds. I’m going to be a tease, and not go into some of the ramifications until later posts in this series, but for now I want to give a bit more of an explanation than I’ve found available in the popular press so far.
Oh, and one small caveat before I jump in–while I think there’s some real potential here, electromagnetics is a topic that I’m truly awful at. I’ve never had another class, including a PhD level turbulent fluid dynamics class that made me feel like such a brow-dragging neanderthal as my Physics 122 class on Electromagnetism. This may be yet another niche technology that while somewhat interesting, ends up not being all that useful. But it looks at least possible that this may become a game changing technology in many space transportation fields. Without further ado, let’s go over some of the basics.
Some Background on MHD Aerobraking and Thermal Protection
The basic concept behind MHD Thermal Protection is that during hypersonic flight, above about Mach 12, the shockwave formed in front of a blunt-bodied vehicle reaches a high enough temperature to form a weakly ionized plasma that is conductive enough to be manipulated by strong magnetic fields. A powerful magnet near the leading part of the vehicle interacts with charged particles in the plasma via the Lorentz force. This force bends the trajectory of charged particles, creates large hall currents, which if I’m understanding correctly repel the magnetic field. These charged particles also impact with the uncharged gas particles nearby (the plasma is only “weakly ionized”) transmitting these forces to them as well. Here’s an interesting diagram I’ll reference from one of the papers I’ll talk about more later (“Trajectory Analysis of Electromagnetic Aerobraking Flight Based on Rarefied Flow Analysis” by Otsu, Katsurayama, and Abe–well worth the $28):
Figure 1 (from Otsu et al): Schematic View of the Flow Around a Vehicle With Applied Magnetic Field and Induced Current
If the magnet is strong enough, this leads to two interesting effects–first, the distance from the vehicle to the bow shock increases (I think the plasma density between the bow shock and the vehicle also decreases, but I’m less sure about that). This can significantly reduce the heat transferred into the vehicle for a given velocity and altitude. The other big effect is that the Lorentz forces create forces that can produce drag or lift. At high altitudes these Lorentz forces can greatly augment the aerodynamic drag forces, effectively making it as though the vehicle had a much lower ballistic coefficient. It should be noted that this force is electrically controllable. In fact, depending on the sophistication of the magnetic apparatus and its location within and orientation with respect to the vehicle, it can possibly also produce lift as well as control torques without the need for aero control surfaces.
Both of these help from a reentry thermal standpoint, because by the time you hit the denser air, where the heating is the highest, you’re going a lot slower than you would’ve been otherwise, and a lot of that earlier braking is done at much lower heating loads than would have been the case without the electromagnetic effects.
Several of the papers I’ve read introduce an interaction parameter term, Q, that relates the relative strength of the Lorentz forces to drag forces. The relationship takes the form:
Equation 1 (from Otsu et al)
Sigma is the conductivity of the weakly ionized plasma, B is the magnetic field strength, L is a reference length (I think related to the magnet configuration), rho is atmospheric density, and V is velocity. As you can see, for a given magnet, the drag forces start dominating as the conductivity drops and as the atmospheric density increases. Atmospheric density increases dramatically as you descend from orbit, so for a reentry application, you get most of your benefit from the first little bit of descent.
We’ll go more into some of these ramifications starting in my next installment.
MHD AEROBRAKING AND THERMAL PROTECTION PART II: ATMOSPHERIC REENTRY FOR RLVS
In this installment, I want to dig a lot deeper into the mechanics of how one might maximize the utility of MHD effects for orbital reentry. But first, I wanted to spend a few seconds discussing what is important for an RLV TPS system.
RLV Thermal Protection Systems
Protection from the harsh heating environment caused by atmospheric reentry is one of the biggest challenges for reusable vehicles–far more difficult than the often harped-on rocket equation or the “inefficiency of chemical propulsion”. The problem isn’t even the weight of the thermal protection system as much as it is the maintenance requirements. Ideally you’d like a TPS solution that requires very little maintenance, and can be “tested” easily and quickly on the ground before flight, even if it cost you a little extra weight. You’d also prefer something that was relatively simple operationally to use, with a minimum number of failure modes. MHD thermal protection seems like an interesting match for these requirements. I should note however that there are other promising ideas out there such as transpiration cooling that might also work on their own or in combination with MHD thermal protection, but they are beyond the scope of this blog post.
Some Take-Aways from the Literature on MHD Reentry TPS
There have been several interesting papers on this topic, including the JS&R article “Experiment on Drag Enhancement for a Blunt Body with Electrodynamic Heat Shield” that got me thinking about this more seriously, a second JS&R article that goes into experimental proof of the heat flux reduction “Experimental Verification of Heat-Flux Mitigation by Electromagnetic Fields in Partially-Ionized-Argon Flows”, and another JS&R article from a year and a half ago “Numerical Analysis of Reentry Trajectory Coupled with Magnetohydrodynamics Flow Control” that I’ll be leaning on pretty heavily for this discussion. You can purchase the articles from AIAA, or if you already have a subscription to the Journal of Spacecraft and Rockets, you can read them for free.
I’ll briefly summarize some of my takeaways before going into my thoughts on how to move things forward from there:
Both analytically and experimentally, magnetic reentry TPS appears to provide large reductions in both peak heating and in total heat load. The third paper above suggested a 30% reduction in peak heat load and a 40% reduction in total heat load for ballistic reentries. Under the conditions tested in the second paper, heat reductions up to 85% were shown.
The magnetic braking effects dominate aerodynamic braking effects at high altitudes. This is mostly due to lower density meaning that atmospheric drag is fairly low, while also lower density means that Joule heating caused by the currents (the loop marked “J” in the previous post) induced by the magnetic fields increases the electrical conductivity more effectively than at lower altitudes.
The more deceleration that can be done high up in the atmosphere, the lower the peak heating and the lower the total heat load. The heat flux is roughly proportional to the cube of the velocity.
The heat flux reduction from this scheme is dominated by the increased shock layer thickness at high altitudes, and at lower altitudes is dominated by the much lower velocity by the time you get there by getting extra braking high up.
Conductivity of the plasma is one of the keys to making this work. The conductivity in these cases was entirely due to the temperature in the plasma–higher velocities lead to higher temperatures, and Joule heating also leads to higher temperatures. As velocities slow down, conductivity drops, as does the effectiveness of the braking system. Below about Mach 12, the only way to keep the flow ionized enough to control magnetically is to add energy via some mechanism.
Because of the large induced currents, this idea only works if the heat shield is an electrical insulator. If it is a conductor, you’ll just generate hall currents in the heat shield which will null out a lot of the benefit of the approach.
Thoughts on Maximizing the Effectiveness of MHD Reentry TPS
Based on these takeaways, and the discussion in the last post, I’ve come up with a few ideas for how to maximize the effectiveness of an MHD heat shield.
Use a lifting reentry. Just as it is possible to offset the CG of a reentry body to generate some aerodynamic lift, it may also be possible to locate and orient the magnet in a way to create both lift and drag. If you do a force balance on a body in a circular orbit, the downward gravitational force is exactly balanced out by a fictitious centrifugal force due to your forward velocity. As you decelerate though, that centrifugal force component decreases, but by using lift, you can counteract some of that gravitational force. This allows you to stay up at a higher altitude longer, which allows you to do more of your deceleration in the lower density air. This is already used by all manned space capsules as well as the shuttle in order to keep reentry decelerations to a reasonably low level, and also to reduce the peak heating. This is even more beneficial for magnetic braking concepts, because you can do more of your deceleration at a point where the magnetic effects dominate, electrical conductivities are high, and heat fluxes are low.
Use as strong of a magnet as you can reasonably work with. While there are diminishing returns according to all of these papers, a stronger magnet does help provide more deceleration and shoves the boundary layer away further.
Use an alkali seed. As velocities decrease, it gets harder and harder to maintain the electrical conductivity in the plasma at a high enough value to maintain useful levels of Lorentz interaction. This is similar to the challenge with MHD electric generators. In order to keep the conductivity high, injecting an alkali metal into the stream can help. Alkali metals, particularly Potassium and Cesium have very low ionization energies compared to air. In a weakly ionized plasma, most of the atoms are actually not atomized–almost all of the conductivity is provided by the small number of atoms that are. So, a little bit of seeding can go a long way. This helps you keep your magnetic deceleration forces high even as altitude and velocity drop. The other nice thing about seeding, is that depending on what the fluid is, it might also cut down on the radiative heat transfer from the hot shock layer back to the heat shield.
Heat the plasma. This may sound counterintuitive, but you might actually get better thermal protection if you start heating the plasma once you get to a certain point. Below Mach 12, even with seeding, there just isn’t enough heat rise caused by the shock layer to keep the plasma sufficiently ionized. But, it is actually possible via several different means to dump a bit of energy back into the shock layer to push the gas back into an ionized state. It’s unclear at this point if this is worth doing, but if the system is light and simple enough it might be worth considering. As it is, you’ll have a lot of stored energy in the superconducting magnet, and you probably want to dump that somehow before landing–using it to keep the incoming air ionized a bit longer to get a little more deceleration before you hit the thick air might be worth it.
All told, you’re still going to need some sort of thermal protection for the last bit of deceleration, but the heat loads and max temperatures are so much lower if you can dump say half the reentry velocity while you’re still high up, that the problem becomes a lot easier to deal with. If you could only get down to Mach 12 with this system, that would cut the peak and total heat loads by at least a factor of 8x. The heat fluxes at this point would be low enough that you wouldn’t need ablative materials, and could probably use a ceramic tough enough that it was low maintenance.
Anyhow, the key questions I have at this point are: a) what sort of effective “L/D” ratio can you get by varying the location and orientation of the magnet, b) how much does seeding help, c) how long can you stay up in the high altitudes, d) what is the maximum amount of velocity decrease you can provide via this method, e) how strong of a magnet could you reasonably hold on an RLV, f) how does the strong magnetic field interact with the operation of the RLV itself–what does it do to solenoid valves, electric actuators, etc. and is there a way to shield against these issues?
In the next segments, I’m going to talk about another, possibly even more interesting application of this concept, as well as some thoughts on how we can reduce this technology to practice.
MHD AEROBRAKING AND THERMAL PROTECTION PART III: AEROBRAKING AND AEROCAPTURE
While using electromagnetic effects for atmospheric reentry and thermal protection is interesting, it’s only one of several promising options that have been proposed over the years. There is another application though, where exploiting magnet-hydrodynamic effects could be a much bigger “game changer” — aerobraking and aerocapture for reusable in-space vehicles.
Traditional Aerobraking and Aerocapture
One of the challenges of orbital mechanics is that it takes just as much energy to descend into a gravity well as it does to ascend out of it. One technique that has been used for lowering the propellant cost of descent into the gravity well of a planet with an atmosphere is aerobraking. Aerobraking is the process of taking a spacecraft in an ellpitical orbit around a planet with an atmosphere, and using atmospheric drag at the lowest altitude portion of its trajectory to slowly decrease the altitude of the high end of the elliptical orbit. This process has been used now on about a half-dozen planetary missions, in some cases reducing the propulsion requirements by 1km/s or more, over the course of a couple hundred passes. Aerobraking has been traditionally been done by satellites that aren’t explicitly shaped like a reentry vehicle–in fact most of the drag for typical aerobraking vehicles is produced by using the spacecraft’s solar panels as massive drag brakes!
A more aggressive maneuver called aerocapture takes a spacecraft in a hyperbolic (interplanetary) orbit and in a single pass decelerates that vehicle into an elliptical orbit around a planetary body. Typically the term refers to maneuvers where the ending orbit has an apoasis near the altitude of a circular orbit, though it could also be used to describe a maneuver that uses a single pass through the atmosphere to replace the “capture braking burn” that would normally be used. Aerocapture is a lot more challenging, since the deceleration has to take place a lot lower in the atmosphere in order to provide the required deceleration in such a short distance. This implies much higher forces and heat-fluxes, which require some sort of aeroshield/TPS system.
Here are a few of the main challenges of aerobraking and aerocapture:
Dynamic Pressure Loads: Dynamic pressure is the pressure felt on the vehicle by the impingement of the atmospheric molecules. The equation for dynamic pressure is q = 1/2 * rho * V^2, where lower case q is the dynamic pressure, rho is the instantaneous atmospheric density, and V is the instantaneous relative velocity. For MRO, the dynamic pressure limits were set at 0.35 Pascals, which correlates to moving at about .76m/s at sea level (ie a slow walking pace). To give you an idea of how this compares with orbital reentrythe peak dynamic pressure of say a Soyuz in its emergency ballistic reentry mode, is over 40,000 Pa of dynamic pressure, and even a low-G lifting reentry is still in the 10kPa+ range. Direct entry into the Venusian atmosphere from a hyperbolic interplanetary orbit gets you into the 1MPa range! Another fun comparison is that the max-Q Xombie or Xoie have seen in flight was around 250Pa. Most of the very low allowable dynamic pressure load for past aerobraking efforts has been driven by the fact that most aerobraking craft to-date have used large flimsy solar panels as their main drag structure.
Peak Heat Flux: The shockwave caused by slamming into gas particles at hypersonic velocities compresses and heats the gas particles to substantial temperatures. Heat from this shock wave is convected and radiated into the aerobraking spacecraft. The equation for heat flux is Q = 1/2 * rho * Ch * V^3. Capital Q is the heat flux (in W/m^2), rho and V are the same as before, and Ch is the heat transfer coefficient. The heat transfer coefficient, I think, represents what portion of that heating goes into the vehicle itself instead of being carried off by the now quite ruffled atmospheric gas molecules who didn’t see you coming. Yes it is confusing that dynamic pressure is lower-case q, and heat flux is capital Q.Once again, to give you some scale, the worst case pass for Odyssey had an estimated heat flux of about 500 W/m^2, which is about 40% of the heat you get in LEO from the solar radiation. For that Soyuz reentry case mentioned earlier, the total heat generated at max-q is in the 240 MW/m^2 range–several times higher than the heat flux at the throat of the SSME or RD-180. The Venusian direct entry example according to one source would actually be in the 4000MW/m^2 range! Fortunately, I think that for atmospheric reentry the Ch term is relatively low–most of that heat gets carried away by the atmosphere.As with dynamic pressure loads, the reason why peak heating rates are kept so low for most aerobraking missions is that you’re using the large solar panels as most of the drag surface, and they can only take so much heating before their temperatures rise to levels that could permanently degrade their performance.
Atmospheric Density Variations: If atmospheric density was nice, constant, and well-known, aerobraking could proceed a lot faster and in a lot fewer passes. The problem is that at the altitudes where aerobraking takes place (100+km), the density can vary significantly over length scales as small as 20km. This can be driven by many processes including variations in the solar wind and solar radiation due to sun cycles, weather effects like dust storms for Mars aerobraking, and other effects. Going off of some data from the Odyssey mission, variations as big as 2-3x were seen in density from pass to pass. A second-order effect of density variations is that both the drag coefficient and the heat transfer coefficient will vary with atmospheric conditions by noticeable amounts. Unfortunately, in many cases you don’t know the density along a given trajectory in advance, so you have to plan for not the average density, but the worst case pass density. Which means that most of the time you’re getting less deceleration and heating than you could actually withstand, but some of the times you might actually find yourself pushing your limits more than you would like. This drives you to taking more passes than you’d really like to take in an ideal situation. These variations get more and more pronounced at higher aerobraking altitudes, where atmospheric density is measured in kilograms per cubic kilometer.Once again, this is an area where using large, sensitive solar panels as your drag devices really hurts. Because you can’t stand high dynamic pressures or heat fluxes, you have to do your passes higher up in the atmosphere. But due to variability in density at those higher altitudes, you end up getting driven even further up to deal with worst case variations. That said, even aerocapture trajectories are high enough altitude that atmospheric variations can be important challenges to deal with.
Aerobraking Duration: For most previous Mars and Venus aerobraking missions, velocity changes in the 1-1.2km/s range have taken between 70-150 days, over several hundred passes. While this is fine for unmanned missions, it’s harder to do for manned missions, where radiation concerns make you want to minimize your time spent in-transit. The large number of cycles is also a difficulty for missions aerobraking at earth, where each pass will take you through the Van Allen belts. Lastly, for reusable in-space transports, the total turn-time is an important economic parameter–the more missions you can fly in the same period of time, the fewer vehicles you need to support a given mass throughput.
A couple more quick observations before we jump into using MHD forces to enhance aerobraking:
For typical aerobraking, the parameter you can control easiest is the periapsis altitude, and thus indirectly the average density. In other words, if you want to double the drag on a pass, you lower your periapsis to an altitude that has about double the average density. This also means that to a first order approximation (ie ignoring the relation between density and the heat transfer coefficient) heat flux for traditional aerobraking is going to scale fairly linearly with drag.
Ballistic coefficient ends up being really important for aerobraking as well–this is the whole reason why the solar panels are used unstowed for aerobraking. Higher ballistic coefficients mean that you have to dip lower into the atmosphere (and thus get a higher heat flux) to get the same amount of deceleration per pass.
In spite of the disadvantages of using solar panels as your drag brakes, there are some real advantages to being able to use a aerobraking scheme that doesn’t require your vehicle to be explicitly crammed into a typically reentry-vehicle shape behind a massive heat shield. It would be nice for instance to be able to get tanker vehicles or orbital tugs back from lunar trajectories or martian trajectories without them having to carry a big aerobraking shield like you see in all the old literature.
Anyhow, that was a quick introduction to aerobraking by a complete non-expert.
Some Backstory on Why I’m Interested in Aerobraking
I started looking into this a few months ago as an alternative to propulsive retrobraking for Centaur-derived cislunar tanker vehicles. While a Centaur stage actually can do a lunar round trip fully propulsively, with at least some payload delivered to the Moon, the “gearing ratio” (initial mass in LEO compared to payload delivered to LUNO or the Lunar Surface) was pretty pathetic. Just to use some ballpark numbers, without digging up my more precise calculations, I’m getting around 8000lbs payload to LUNO if you drop it off in orbit and the Centaur only returns to earth, dropping to only 2500lb if the Centaur has to haul the payload all the way there and all the way back propulsively. However, if you could do 3km/s worth of aerobraking (assuming about 1200m/s worth of burns between the Trans-Earth Injection burn and any periapsis raising maneuvers, including the final circularization), all of the sudden you’re talking about almost 20,000lb of payload on the dropoff mission, and about 13000lb on the round-trip maneuver. Depending on how massive and expensive the aerobraking system weighs, it makes a massive difference in the performance of a reusable cis-lunar architecture. For a long time though, I had sort of dismissed aerobraking, because any aeroshield big enough to allow single-pass aerobraking (or few enough passes to be interesting) also ended up looking like it would either be very heavy, or very bulky, or require lots of orbital assembly or some sort of new deployable technology. Not that any of those other than being too heavy was a total show-stopper, but it definitely made it less attractive for a near-term commercial operation.
Another line of thought I had been wondering about recently was manned cislunar transportation, especially in light of the Augustine Committee report. One of the big suggestions they made that rubbed a lot of HLV-advocates wrong was the idea of launching the crew on commercial LEO taxi vehicles, and flying Orion up to LEO unmanned. A lot of people said this was just silly–if you’re launching Orion may as well launch it manned, even though this would require adding launch escape and emergency detection capabilities to the HLV. I started thinking down the lines of what Orion could look like if it was designed from the start not to carry astronauts until they got to space. The LAS would go away, as would all the structural requirements for taking those sorts of loads, being able to rapidly drop the service module, etc. The whole thing could fit inside a fairing, thus simplifying aerodynamics and loads on the front end of Orion. Heck, it could even be attached to the rest of the stack in whatever orientation made the most sense for mission ops–it wouldn’t be constrained by needing to be on the top in an orientation where the capsule could “get out of Dodge” in a hurry if something “went south” with the HLV. The more I thought about it, the more I realized that Orion could end up looking like a drastically different vehicle if it was optimized for in-space use and reentry instead of needing to also handle manned ascent to orbit as well. Then I made an interesting leap of logic. What if Orion was only meant to be used in space? I originally sort of dismissed this, since most single-pass aerobraking schemes I knew of would require the thing to be designed like a reentry capsule anyway.
Jumping back to the Centaur-based tug idea, I toyed around with the idea of doing a blog series, seeing if I could make an aerobraking simulator to figure out if a Centaur could without any sort of fancy aerobraking shield actually do a multi-pass aerobraking mission that would get it back to LEO within a reasonable amount of time (say three weeks or less). However, I stumbled on the papers about magnetic aerobraking right about this point in my thought process, which may possibly provide a solution to both of these problems.
While I don’t have anywhere near the analytical chops to know for sure how far you can push this technology, if it could enable single-pass or at least small number of pass aerobraking without requiring a huge traditional aerobraking shield, interesting things might become possible. Magnetic aerobraking could potentially revolutionize cislunar transportation, enabling low-cost reusable manned and unmanned deliveries based on modified versions of existing LOX/LH2 upper stages, and could allow fully-reusable in-space only manned vehicles that weren’t just an overglorified 1960s-style reentry capsules. But more on that later.
For now let’s get back to how we can use magneto-hydrodynamic interactions to enhance traditional aerobraking, and see if we can figure out if this idea has merit at all.
Magnetic Aerobraking
Going back to our previous two discussions, one of the key takeaways was that the enhanced braking and thermal protection provided by strong magnetic fields was strongest at high altitudes where atmospheric density was lowest. At high altitudes, the ambient atmospheric density is low, but Joule heating caused by the interactions between ions in the shock layer and the superconducting magnet keeps the electrical conductivity of the plasma in the shock layer high. Also, for aerobraking or aerocapture short of reentry, by definition you are both always at a speed and altitude high enough that you don’t have to worry about the shock layer losing sufficient conductivity for MHD effects to dominate aerodynamic drag effects. The magnetic interaction parameter (Qmhd) introduced in my first post in this series can easily be in the 250-1000+ range at high altitudes compared to down in the 5-50 range you might see during atmospheric reentry. For example, the paper I cited in my first article (Otsu et al) showed that for a vehicle coming back from a GTO-like orbit, you could cut the return time by 70% with a 0.1T magnet, which is about 5x weaker than the magnet assumed for most of the reentry magnetic TPS studies. While magnetic effects may be helpful for reentry, they truly come into their own for aerobraking and aerocapture.
A few other thoughts:
While the total drag for a magnetic aerobraking concept can actually be several times the drag of a similar non-magnetic vehicle, the gas-dynamic portion of the total drag actually decreases substantially in the case of magnetic aerobraking. This is due to a much lower velocity behind the shock layer in the magnetic case. Figure 9 from the Fujino et al paper I used in the last post (“Numerical Analysis of Reentry Trajectory Coupled with Magnetohydrodynamics Flow Control”, JS&R Vol 45 No 5, pg 911-920) illustrates this beautifully:
For a vehicle using magnetic braking, most of the total drag force is actually reacted electromagnetically through the magnet itself, not through the surface of the vehicle. The dynamic pressure that the vehicle surface itself sees is greatly reduced compared to what you would expect at that altitude and entry velocity.
While in the above case, the dynamic pressure reduction was about 4x at ~75km, this effect is likely to be even more pronounced at the altitudes used for aerobraking (90-120km) where the electromagnetic interaction parameter is substantially higher (40-160x higher) than it is in the case shown above for atmospheric reentry.
The heat flux seen by the aerobraking vehicle will also be greatly reduced compared to a non-magnetic aerobraking system at a similar altitude and velocity. This is due to the much thicker shock layer standoff distance and the lower velocity of the particles behind the shock layer. The Fujino et al paper estimated that the heat flux would roughly be cut in half at 75km with a 0.5T magnet (due to a boundary layer between the bow shock that is twice as thick at that magnetic interaction parameter).
For higher parameters in the 100-1000 range that you would likely see for aerobraking, this effect should be even more pronounced. The trend in shocklayer thickness vs. Qmhd shown in Fig 3 of Fujino et al was linear over the Qmhd range of 0-6. If it continued out linearly up into the Qmhd 100-1000 range, the shock layer standoff distance would be in the range of 100-125x thicker than without MHD effects, implying a drastically reduced heat flux at aerobraking altitudes. Unfortunately without having them run the actual analysis, it would be hard to know precisely how well this would work.
All these factors mean that the same vehicle could use a lower periapsis with a magnetic braking system than without. The dynamic pressure and heat flux that the vehicle sees at a given periapsis altitude is going to be at least 2-4x and possibly more than an order of magnitude less than it would be without the magnetic field. Even in the most conservative case (ie assuming that the effect at 100km and aerobraking speeds is no better than at 75km in spite of having a Q 40-160x higher) this would allow you to go to an altitude with at least double the density while keeping the heat flux and dynamic pressure loads within tolerances. With an effective total drag 4x higher at a given altitude combined with being able to go to a lower periapsis, you get bare minimum a 8x reduction in total aerobraking time compared to the non-magnetic case.
For the aggressive, “I don’t know if I’m extrapolating way too far” case, you could get even larger reductions in aerobraking time. Going back to my linear extrapolation on shock layer standoff vs. Qmhd (and thus heat flux vs Qmhd), at Qmhd=250 this would put the shock layer standoff at about 25-30x thicker than the non-MHD case. The example in Otsu et al gave a Qmhd of 250 using a 0.1T magnet and a 100km periapsis. Since Qmhd is proportional to B^2 and inversely proportional to rho. If you increased the magnetic field from 0.1 to 0.5T (similar to what was being suggested for the reentry studies done by Fujino et al and some of the others), you could maintain a Qmhd of 250 even if you increased the local density by a factor of 25. At Qmhd of 250, the effective drag coefficient is about 3x higher than the non magnetic version. That would give up to a 75x reduction in aerobraking time compared to the non-magnetic case.
One other advantage of magnetic aerobraking is that you can drastically vary your effective drag coefficient electrically. Also, the heating and dynamic pressure are far more driven by the magnetic field strength than by the atmospheric density for the MHD aerobraking case. These mean that you can afford to take deeper passes without having to worry as much about variability. If the density is higher than expected, and you have some head-room on your magnet, you can increase the MHD field strength a bit to keep the shock layer back and the dynamic pressure down. This also could cut trip times in half just by allowing you to base your planning off of the average atmospheric density instead of having to take the mean + 3 standard deviations as your predicted atmospheric density.
I’m rapidly coming up to the point where I’m pretty sure I no longer know what I’m talking about. At least from here, it looks like there’s a good chance that MHD aerobraking could allow for aerocapture (at least into a high eccentricity elliptical orbit), and very rapid aerobraking down to a circular orbit compared to the non-magnetic case. I think you can extrapolate the conclusions of these papers in these ways, but without having the people with the analysis tools actually verify these claims, I’d still take them with the appropriate sized grain of salt. Also, my intuition on how a MHD aerobraking vehicle would compensate for density variations is not very good. That alone could be a paper or a thesis.
So, whether this ends up being a mild curiosity that ends up only being useful in niche applications, or a game-change remains to be seen, but the potential for this being a game-change is real.
As mentioned before landing a tailsitting rocket (Vertical takeoff, vertical landing or VTVL) requires lots of training, since the pilot is basically performing a controlled crash. As you can discover for yourself by playing a few games of Lunar Lander.
“Altitude seventy-five hundred feet, manual attitude control is good.” We copy, Conestoga. You’re now in final approach phase.
“Landing gear lowered, landing shoe deployed. Passing high gate at angels seven-three and all systems are nominal.” You’re go for landing.
His palms were sticky with sweat; Parnell wiped them off on his trousers, then took a second to glance around A-deck. On the opposite side of the flight deck Ryer had her hands locked on the control yoke, her eyes flickering across the myriad dials and digital displays at her station, while Lewitt carefully watched the engine status board at his console. Conestoga had passed “high gate,” the point of no return. At this juncture, it was a captive of lunar gravity and was committed to touchdown except in the most dire emergency, in which case firing engines to achieve escape velocity meant using the fuel reserves. If that happened, they would have no recourse except to limp home.
That wasn’t going to happen, though. So far, the descent had been smooth. One of the CRTs on Parnell’s console displayed a map of the landing site, with a series of concentric circles expanding outward from the ground-zero mark. He tapped a command into his keyboard and the computer responded by pinging twice; the tiny crosshatch designating Conestoga’s position was slightly to the left of the circles.
“Altitude two thousand feet and closing,” he said. “Landing beacon is acquired, thirty-five degrees from mark. Over.”
“Correcting attitude,” Ryer said. “Closing in on landing beacon.” Parnell felt the ship tremble as Ryer fired thrusters to compensate for Conestoga’s drift. The crosshatch moved closer to the bull’s-eye as the moonship homed in on the automatic radio beacon at Tranquillity Base.
Roger that, Conestoga. You’re looking good. Over. Main-Ops was monitoring radar telemetry sent from the base, playing backseat driver.
“Fuel reserves nominal,” Lewitt said. “The shoe is down, gear is locked.” The shoe was a vertical probe which extended straight down from the center of the engine array, designed to absorb most of the landing shock and stabilize Conestoga once it was on the ground.
“Altitude one thousand two hundred feet, seven degrees off the zero and closing.” Parnell glanced away from his board, looking across the compartment at Ryer. “Need to goose it a little there, Cris. There’s a boulder field you need to …”
“I know, I know. I’ve been here before.” Ryer was fighting the yoke with one hand as she worked the thrusters with the other. Landing four hundred tons of flying skyscraper on a dime was not a job Parnell envied. Ryer had the skill and guts needed to pull it off, but he had done this once himself, and he didn’t recall being so goddamned nervous back in ’69….
Forget it, he told himself. Let her do her job.
Conestoga was now only a thousand feet above the base’s cleared landing area. Although Ryer had managed to compensate for engine drift, the ship’s terminal velocity was sixty-five mph above touchdown speed. “Angels one and we’re on the beam,” he said. “Coming in a little fast …” As he spoke, he felt the entire fuselage shudder as Ryer throttled up the engines. She was braking Conestoga just in time; the ship listed one degree starboard, but she gimbaled the port thrusters and quickly brought the mammoth vessel back in line. We copy, Conestoga, you’re on the mark. We check you at altitude seven hundred fifty feet and closing. Over.
“Roger that, Main-Ops. Altitude seven-two-five, all systems a-okay for touchdown.” For the first time since they had commenced final approach, Gene looked up at the TV monitors. The lunar horizon was no longer curved, but instead lay as flat as a Kansas prairie, gray volcanic maria with short rounded hills in the far distance. Dust was already being kicked up by the engines, but through the dirty haze he could make out boulders and small impact craters, and glimpses of unnatural man-made shapes reflecting sunlight….
No time for sightseeing. He pulled his eyes away from the screens and back to the console where they belonged. “Altitude four hundred, altitude three-five-oh …” We copy, Conestoga …
“Reserves down by point two percent,” Lewitt said.
“Throttling back five percent,” Ryer responded.
“Staying on the beam, zero drift. Altitude one-fifty, one twenty-five. Throttle up a notch there …”
“Engines up one percent …”
“Altitude seven-fiver, attitude nominal …” We copy, Conestoga. Looking good.
“Altitude fifty, engines down two percent.” The entire vessel shook as if it were caughtin a minor earthquake. Nothing could be seen on the screens now except dust and dense shadows. Parnell licked his dry lips. “Altitude twenty-five, altitude twenty …”
“Engines back two percent …” “Shoe contact light!” Lewitt shouted.
“Altitude fifteen … twelve … ten …”
Now he could hear an almost impossible roar as Conestoga’s engines baked the hard volcanic floor. “Eight … six … five … cut main engines.” “Roger. Cutting main engines. Engine arm off.” The trembling stopped, and for an eternal half-second there was the sensation of falling … then the landing gear slammed into the regolith. “Touchdown!” Ryer yelled.
Conestoga teetered on its legs like a drunk fighting for balance. For an instant it seemed as if the towering vessel would keel over and crash on its side, but then the gyros told the hydraulics which end was supposed to be up, and the moonship remained erect. The fuselage creaked as gravity settled old bulkheads and deck plates into unfamiliar positions, but after a moment that, too, passed.
And then there was nothing but silence.
Parnell took a deep, shuddering breath. “Wheel Command, this is Conestoga. We have landed. Over.” We copy, Conestoga. Good job. “Engines safed,” Lewitt said, his fingers quickly moving across his console to click switches. “Internal pressure okay, landing gear intact, main computer reset on standby mode. All systems green.”
Our Moon being an airless planet, a torchship can land on it. But the Tom Paine, being a torchship, was really intended to stay in space and be serviced only at space stations in orbit; she had to be landed in a cradle. I wish I had been awake to see it, for they say that catching an egg on a plate is easy by comparison. Dak was one of the half dozen pilots who could do it.
From DOUBLE STAR by Robert Heinlein, 1956
SPACE CADET
With Thurlow at the controls and Matt in the co-pilot's seat the jeep started down. It started with an orbital speed of better than four miles per second, the speed of the Aes Triplex in her tight circular orbit around the equator of Venus. The lieutenant's purpose was to kill this speed exactly over his destination, then balance the jeep down on its tail. A jet landing was necessary, as the jeep had no wings.
He needed to do this precisely, with the least use of fuel. He was helped somewhat by riding "with the current" from west to east; the 940-mile-per-hour rotational speed of Venus at her equator was profit rather than loss. However, exact placement was another matter. A departure time was selected so that the entire descending curve would be on the day side of the planet in order to use the Sun as a reckoning point for placement in longitude; placement in latitude would have to depend on dead reckoning by careful choice of course.
The Sun is the only possible celestial body to use in air navigation at Venus, and even Sol is lost to the naked eye as soon as one is inside the planet-wide blanket of cloud. Matt "shot the Sun" by keeping one eye glued on the eyepiece of an infra-red adapter which had been fitted to the ship's octant, and was enabled thereby to coach his skipper from a prepared flight plan. It had not been considrred practical to cut a cam for the automatic robot; too little was known about the atmospheric conditions to be expected.
When Matt informed his pilot that they were about thirty miles up, by radar, and approaching the proper longitude, is given by the infra-red image of the Sun, Thurlow brought the jeep down toward their target, ever lower and slower, and finally braked her with the jet to let her drop in a parabola distorted by air resistance.
They were enveloped in the ever-present Venerian clouds. The pilot's port was utterly useless to them. Matt now started watching the surface under them, using an infra-red-sensitive "cloud piercer."
Thurlow watched his radar altimeter, checking it against height-time plan for grounding.
"If we are going to dodge around any, it's got to be now," he said quietly to Matt. "What do you see?"
"Looks fairly smooth. Can't tell much."
Thurlow sneaked a look. "It's not water, anyway — and it's not forest. I guess we'll chance it."
Down they dropped, with Matt watching the ghostly infra-red-produced picture narrowly at the end, ready to tell Thurlow to give her full power if it were a meadow.
Thurlow eased off his jet — and cut it. There was a bump as if they had fallen a couple of feet. They were down, landed on Venus.
"Whew!" said the pilot and wiped sweat from his forehead. "I don't want to have to try that every day."
"Nice landing, Skipper!" called out Oscar.
"Yea bo!" agreed Tex.
"Thanks, fellows. Well, let's get the stilts down." He punched a stud on the control board. Like most rockets built for jet landings, the jeep was fitted with three stabilizing jacks which came telescoping out of the craft's sides and slanting downward. Hydraulic pressure forced them down until they touched something solid enough to hold them, whereupon the thrusting force was automatically cut off and they locked in place, propping the rocket on three sides, tripod fashion, and holding it erect.
Thurlow waited until three little green lights appeared under the stud controlling the stilts, then unclutched the jeep's stabilizing gyros. The jeep held steady, he unstrapped. "All right, men. Let's take a look. Matt and Tex, stay inside. Oscar, if you don't mind my mentioning it, since it's your home town, you should do the honors."
From SPACE CADET by Robert Heinlein (1948)
CONTRABAND ROCKET
Note "Absyrtis" written on upper fin artwork by Ed Valigursky
(ed note: in the year 2050, our heros are members of the Southwestern Rocket Society (SRS) fan club. The fans want to travel in space in the worst way, but civilians are not allowed to fly in their own ships.
On a field trip to Luna Louis' rocket junkyard they are stunned to find the space ship Absyrtis sitting in the lot. As it turns out that ship was Mr. Louis' last command when he was in the UN Space Force, and when the ship was decommissioned he managed to obtain it at scrap metal prices.
Club president Chubb Delany has an insane idea. He tells Mr. Louis that the club would love to refurbish the old ship, and fly it on a short hop to Luna. With Mr. Louis as captain.
Mr. Louis says if the club will promise that, he will give the ship to them free, along with any used rocket parts in the lot needed for the refurbishing.
They refurbish the ship pretty good, considering they are amateurs. They have to do lots of damage control once in space, due to all the things that were not refurbished as well as they thought. But the real fun comes when they are making the landing on Luna at Dianaport.)
“All divisions stand by to commence pre-landing checks at
will! Executive officer report to the control room. It is now
approximately ten hours to zero on landing at Dianaport!” Chubb left the details of the ship up to Bert and concentrated on the mechanics of their landing at Dianaport. He
knew it was a critical test of the ship and crew. Lift was
mere button-pushing. It takes considerably more skill to
bring a space craft to rest with another object—considerably
more skill indeed. He planned for a straight-in approach.
An involute would have been better, but he did not want
to stretch his luck in that complex a maneuver. With the
Moon’s slow rotation, he did not have to allow for much
of a drift angle. But because of Dianaport's position in
Mare Nubium, he would have to correct quite a bit to get
a truly radial approach. He had it worked down to one application of thrust for
correction of trajectory and another for landing and was
about to set up a prob to see if it could be done with one
prolonged acceleration period when Bert interrupted him. “My checks don’t look so good, skipper,” the first mate
told him. “Servo systems on the guidance nozzles are wild.
We’ve apparently lost the dither on the transfer valves,
and the system’s become critically damped.” “Oh, great balls of fire! Can it be fixed?” Chubb exploded. “I don’t know. I’ll have to check.” “Well, check—and fix it! How am I going to get this
crate down without guidance nozzles?” “I’ll try, skipper …” “Try, hell! Do it! If you need help, I’ll lend a hand. I’m
familiar with that lash-up.” “Okay. But brace yourself for something else …” “Break it gently,” Chubb moaned. “Danforth's got running rabbits on the approach radar,
and the range tracking element's gone out of calibration.” Chubb looked dismayed. “One more failure, and we can
forget about trying to land; we’ll be lucky to get close
enough to crash.” “How about going into circum-lunar orbit, skipper?” “That’s not a bad idea, but I don’t know if it can be
done.” He scratched his head. “Let me feed it to Isaac
Newton here. Get busy on that guidance and radar—and
don’t Waste my time telling me it can’t be fixed. Get the
lead out and use that time to figure out how it can be fixed
—then let me know how you did it. And move! We haven’t
got six months to play around this time!” Thirty minutes later, Chubb had determined that the
Absyrtis could not make circum-lunar orbit. The mechanics
of the maneuver were too expensive and too complex to be
attempted. He told Bert, “It’s Dianaport or nothing, chum.
Can I give you a hand with that servo problem?” LeRoy was almost at his wit’s end. The million little
troubles he was havingin the power room were almost beyond him. He called Bert to report it. Chubb overheard.
He muscled Bert away from the intercom and told LeRoy,
“Look, you spent six months with that tangle of plumbing!
Don’t tell me you can’t make it work now! Get out those
spares you made! Get on the stick, man!” “But, skipper, this rusty old …” “If you want to gripe, join the Space Marines!” Chubb
paused and went on in a quieter tone of voice, “What’s the
trouble, LeRoy? Can I help?” Chubb could. He was a trained hydaulic engineer. LeRoy wasn’t the only one he helped in those long hours before turn-over. He wasn't doing the job Louis could have
done; but it didn’t worry him because he was doing the
best he could. He cajoled, cursed, encouraged, reassured,
and bawled out his division chiefs, but he was always ready
to help them. The crew responded. At turn-over time,
there were still troubles, but the crew was of the state of
mind where they would have gotten out and pushed if
that would have done any good. The men of the Absyrtis were no longer the South-western Rocket Society; they were the crew of the space
ship Absyrtis, a rusty, obsolete old bucket but still their
pride and joy. Amateurs they were and would admit the
fact—but unqualified, no. Heaven help the man who had
the temerity to say they were not competent. Hadn’t they
taken a piece of rotting junk and remade it into a space
ship which was able to break free of the Earth’s stubborn
gravity? They were not thoroughly satisfied with that, however.
There was a matter of landing, the final portion of the
examination. When they landed—not if—they would not
have to take the ridicule of the seasoned spacemen. The
landing would be their accolade. There are no adequate adjectives to describe their utter
determination to get that ship down on Luna and eventually back to White Sands. It was reflected in the manner in which they performed
turn-over, swinging the ship around so that the rocket
nozzles pointed toward Luna. The radar was still jumping,
but Danforth was reading it; the servos had no dither, but
Bert was working the guidance nozzles by direct coupling,
hoping that the hydraulic lines would hold; and the power
plant—well, it looked good, but only the actual operation
would tell the story. They came in boldly but carefully on their approach. “Dianaport Traffic reports that we are in the groove,”
came the report from Bob Danforth. “Do they sound worried?" Bert asked. “No. Doubtful, perhaps. They’re going to hold traffic
when we get in the final approach leg—and the meat
wagons are standing by.” “Tell them we won’t need them,” Chubb remarked from
under the astrostat hood. “How about some radar and doppler data?” Bert asked
the electronics officer. “In half a shake. I’m having a little trouble reading the
scopes and getting the aft radar locked in. We’re still a
little far out; I’m getting a double trace on my scopes, but
you’ll have data shortly.” “Well, start pushing doppler difference frequencies up
to the computer as soon as you can.” The ballistic computer
was standing by, its memory banks loaded with all the
information Chubb and Bert could give it. The program data
was also inside it. It was merely waiting patiently for final
position data in order to swing into action. “Line up looks good,” Chubb said, pushing his astrostat
hood up. “Give or take a half r-c-h, I think we can live
with it. What’s the minus time for correction maneuver?” “I won’t know exactly until we get some radar. Wup!” “Electronics to control! Do you read that radar data
okay?” Danforth’s voice came over the phones. Chubb and Bert checked the winking tell-tale lights
and swinging dials on their boards. “It looks rough, but the computer’s taking it,” Bert told
him. He looked over at Chubb. “Computer and autopilot
tracking, skipper. Minus five minutes to correction time.” “Okay, Bert. All hands to acceleration stations and
strapped. Get the power plant hot and ready to go. Give
me thirty-second counts.” “Aye, sir. Do you want all hand in pressure suits?” “Negative. We don’t have enough to go around. Have
Greg seal all compartments in case we spring a leak under
thrust.” It was, as usual, a long wait. After making one final adjustment on the autopilot panel,
Chubb floated over to his couch and started strapping in.
He studied the data presentations on his panel as he did
so, trying to get the feel of this landing. He had studied
the techniques of landing in texts, but realized it was more
of an arcane art than a science. It took What they called
“touch”, and he didn’t have any. He would have to feel
his way down by inches, but he didn’t dare waste any
time about it. The Absyrtis had only so much propellant
left in her tanks, and he didn’t want to waste it by needless maneuvering or fighting gravity too long. “All hands ready, sir,” Bert reported, jostling him from
his concentration. “Ninety seconds to zero!” “Let’s have pumps!” “Roger! Power room, stand by to fire!” “Power room here! Pumps coming up! Tank pressures
coming up! Reactor at pre-fire heat!” LeRoy’s voice replied. “I think she’ll hold! I think she’ll hold!” “Read-back check on parameters!” Chubb ordered. Bert consulted his panel. “Set for all units one-third
thrust—Three degrees pitch positive and seven degrees yaw
left on the guidance nozzles for five seconds thrust duration. Do you concur?” “Concur.”
artwork by G. Benvenuti
“Sixty seconds to zero!” In theory, the Absyrtis could have made the Earth-Luna
jump with two applications of thrust: one at lift and one
at landing. However, it would have required accuracy far
beyond practical engineering ability. Instruments could not
be read that closely, neither by man nor machine. And the
instruments could not possibly be expected to have that sort
of accuracy. It was much cheaper, both in terms of all-up
ship mass and sheer complexity of machinery, to allow for
deviations and carry along a meneuvering margin in the
propellant tanks. “Thirty seconds to zero!” “Power plant hot!” The pumps were shaking the ship
again. Chubb stared at the pin-point stars in his astrostat, making a last check. Pushing a switch, he changed the mirror
angles to show three separate stars which would coincide
in the eyepiece once the correction had been made. “—fifteen—fourteen—thirteen—” Bert was chanting in a
monotone. Chubb braced himself, relaxing and at the same time
preparing himself for the push that was coming. “Fire on
autopilot!” “—four—three—two—one—” It was a hard start, even at reduced thrust. The ship
bucked violently, then settled down to shaking. But it didn’t
last long. The motors shut down with their usual clamoring and bellowing, a wet, sloppy blubber that was heard
even in the control room. Chubb squinted through the astrostat . “Looks good here,”“Bert remarked. “Power plant in cut-off!” LeRoy called. “She works
smooth!” “Smooth, my foot!” Greg’s voice snapped. “What are
you burning for go-juice?” “Shut up!” Chubb roared. The three stars were perfectly aligned and holding their positions. “Steady as she
goes, Bert. Give me some ranges and bearings?” “Dianaport or Divana Space Station?” “Both.” He lay silent as the data flowed into the computer.
Watching, he saw it was assimilating the data continuously
and was holding to program. It was a reliable piece of
equipment, but with the fouled-up radar, Chubb felt he
would probably have to make part of the landing either
on manual control or manual over-ride. The Absyrtis was in quite close and falling toward the
Moon’s surface at a little better than a kilometer per
second. Bert was reading Moon-relative vectors now, using
his own astrostat as a drift indicator. So far, so good, thought Chubb. He was just beginning
to correlate all the data into a fair mental picture when
LeRoy’s voice screamed over the interphone, “Control room,
we’ve lost a pump! Number Four has seized her bearings!
Chambers three and five are out!” That was almost too much for Chubb. He hesitated for
a split-second, then saw the approach rate indicator. “Bert!
All available chambers stand by for full thrust! Program
the computer for four-g by chambers one, two, four, and
six! Guidance corrections accordingly! Move! I want to
know if we can do it with what we’ve got!” So near, he thought disparingly, and yet so far. Three-
hundred and eighty-three thousand kilometers behind them
and less than a thousand to go. A half-year of work, hours
of sweat and worry, a man’s life—and a failure with the
goal in sight. Bert had the keyboard console swung over his couch
and was setting up the new prob. LeRoy called up, “Skipper, can we make it on four chambers?” “Pipe down and keep your britches on!” “Whew!” Bert breathed. “We can make it! Four and a
half minutes to zero!” “LeRoy,” Chubb called the power man, speaking in a
firm but quiet tone, “we’re going to have to mash it in under high-g. Can the plant take it? How does it look?” "I've got my fingers crossed. We’ll have to do something about the vibration at high thrust; it shakes everything loose.” Chubb thought back, trying to remember his theory of combustion. “Look, are your pumps running fast enough?
Try increasing the injector pressures.” He was shooting in
the dark, but it might work. “It may bust the chambers.” “Not those iron maidens it won’t.” The Absyrtis had been
built long before the thin-walled, light-weight modern rocket
engines had become standard equipment. They were such
an integral part of the ship’s structure that they had never
been torn out during the many modifications; the ship-yards had merely modified the injectors. "We'll have to cut the over-speed trips on the turbines!” “Do it! Let ‘em run hot! Those turb buckets will stand
it for a couple minutes! Just hang on, LeRoy, and twist her
tail hard!—Or there’ll be a new lunar crater called Absyrtis!” “Two minutes to zero, skipper!” Bert armounced. “Doppler indicates our approach rate is within one-percent of
calculated. Dianaport and Divana have confirmed. Autopilot
is tracking. Dianaport Traffic says we’re eight degrees north
of the groove and to correct. They’re holding traffic and
have cleared the vicinity of Landing Pad Twenty-three
for us.” “I’ll bet they’re standing by. Meat wagons for us and
cops for LeRoy.” Chubb growled. “Okay,” he went on,
then paused before giving the long-awaited order. “Bert,
stand by to take her down;” “All hands Stand by for landing! Ninety seconds to zero!” “All boards Test-Fly to FLY!” “Boards to FLY!” “Power room here! Pumps coming up!—Up!—Up!—Up!—Good Lord!—Up!” The sound was a scream in the deck plates. “Hold it, LeRoy! Hold her, boy!” “Seventy-five seconds to zero!” “Autopilot?” “Tracking, skipper! Corrections noted and ready for compensation!” “Radar?” “Locked on Dianaport beacons!” The rocky craters lining Mare Nubium were plainly visible through the conning blister now. There was no doubt
that the Absyrtis was falling toward the Moon. “Bert,” Chubb said privately to his exec, “I don’t know
what’s going to happen after we hit dirt down there—but
whatever it is, so help me if we get out of the sky safely
I’ll figure it was worth it.” “Sure, it was worth it! Sixty seconds to zero!” “We’!l make it—We’ve got to make it!” “Control, these pumps may not hold up much longer at
this speed!” LeRoy yelled over the interphone. “Electronics reporting! Divana just went into our blind
spot toward!” “We go down on one radar, then!” “Skipper, that’s suicide!” “Shut up and do as you’re told!” “Forty-five seconds!” “Control room, these pumps are shaking everything!
We’ve got a leak!” “Where? How bad?” “Squirting out around a fitting!” “Tighten that fitting or seal it! Hurry!” “Thirty seconds to zero” “The Lord is my shepherd; I shall not want …” “Shut up, Greg! I can’t hear LeRoy!” Chubb yelled. “Twenty-five!” “We’ll let it leak, Chubb. We’ll just get a little wet, that’s
all” “Twenty!” “All hands brace for landing!” “Fifteen!” Bert screamed. “All green! Autopilot in command!” “Like hell! I’m on manual over-ride.” “Ten!—Nine—eight—.” It looked—well, they might make it—if the radar didn’t
fizzle out—if the computer didn’t go wild—if the guidance
system didn’t jitter—if the propulsion system worked. There
were too many “if’s” for Chubb. He braced his fingers over
the manual controls, not sure of whether he could land the
ship or not, but willing to make a try. “Three—two—one—.” This time one chamber lit off before the rest. He felt the
ship start to swing under the unbalanced thrust. Then all
chambers were lit and correction was possible. The Absyrtis
gyrated wildly, then settled down to a bone-crushing four-g's of acceleration. She hammered and rattled. Chubb clamped his jaws tight
to keep from biting his tongue. He alternated his glances
between the panel with the meters blurred by vibration
and the conning blister. They were falling too fast! No, that was his imagination.
He couldn’t read the approach rate indicator clearly enough.
View aft on the tv monitor was useless; the vibration in
the boat-tail had thrown the camera unit out of synch. But that couldn’t be Mare Nubium below them! It was
much too rugged! Mountain peaks were spearing toward
the ship. There was a weak voice in his headphones. “They’re
holding! They’re holding!” LeRoy was screaming. The acceleration increased slightly, then slacked off
as the autopilot felt its way down, the ground clutter on
the radar confusing it to some extent. Then the ship cocked over at a ten-degree angle. Chubb
almost over-rode it then, but it righted itself before he
could move against the acceleration. Almost immediately,
he was glad; through the brilliant orange haze of the jet
aft, he could see the tiny checkerboard of Dianaport. What had Luna Louis once said? Why, he had been
right! The old bucket did know her way into Dianaport
by heart! The autopiot slacked off and let them fall at a half-g.
The lunar soil rushed up at the ship. Chubb panicked invountarily, the old, ingrained fear of falling taking over.
He tried to grope for switches. Something must be wrong!
He got his hand over the panel, and a sudden burst of
acceleration slammed his hand down on another switch. “What did I hit? What did I hit?” he screamed to himself. But it happened too quickly. Another burst of acceleration, a fall of about, a second’s duration, and then a back-wrenching jolt. The rocket nozzles blubbered and the
dust swirled up around the conning blister. They were down on the Moon. And Chubb discovered what switch he had accidentally
hit. He found himself staring at a luminous light panel on
the overhead which said plainly: “You have just hit the panic switch, provided by the
electronics division for your convenience in times of stress.” He started to laugh." “Jack down,” he managed to get
out. “Secure all in-flight operations. Prepare to …” He
couldn’t go on. He was laughing so hard that tears were
running down his cheeks, pulled by the feeble lunar gravity.
It was not hilarious laughter; there were sobs mingled in. Bert was a bit quieter, but he was doing the same thing.
They lay there together on their couches, having trouble
believing that they had made it at last. Chubb and Bert finally got the ship secured as the big
loading towers were pulling up to the ship. The skipper of
the Absyrtis would have liked to have seen the lunar landscape outside, but by the time things had quieted down to
the point where he was able to take a look, the pressurized
towers had cut off the view. “Electronics,” Chubb called, “give Dianaport Traffic a
yelp and tell them we’re down and secured—and find out
when the quarantine crew will be out …” “Wait one, skipper! I’m talking with them right now!”
Danforth’s voice came back, strangely excited. “How about it, Bert? Have we got ground power yet?”
Chubb asked his exec, checking. “Ready to switch now.” “Okay, all hands unstrap at will and stand by for …” “Chubb! Uh—Control, this is electronics! Skipper! We’ve
got a reception waiting for us!…” “I’ll bet” “No, not what you’re thinking! We’re heroes, skipper! The
mayor of Dianaport and all the colonial officials are waiting
to greet us as soon as we get our locks open! This whole
place is going nuts!”
Three-dimensional representation of the plume-shocks (gray) wrapping around each jet (orange), the
pressure on a diagonal cutting-plane intersecting two adjacent nozzles, and an axial view showing the surface
pressure coeffcient with a yellow "X" overpressure pattern due to shock-shock interactions of the plume-shock
skirts from Maximum Attainable Drag Limits for Atmospheric Entry via Supersonic Retropropulsion
Now admittedly there are not many planets with atmospheres in the solar system that one would want to land a spacecraft containing a human crew. But one of them is Terra, which pretty much all crewed spacecraft would like to return to.
Lifting off from a planet with an atmosphere has few unexpected problems. The rocket goes up in the direction the nose is pointed, so the wind is going down. Since this is the same direction the rocket plume is traveling, the plume is mostly unaffected.
Landing is a problem. The rocket is descending butt-first, so the wind is blowing upwards. Which means the direction of the rocket plume is opposite of the wind. Ever hear the expression "don't spit (or urinate) into the wind?". Well, don't shoot your flame-thrower into a hurricane. Over and above the fact that the wind will blow back your flame and burn you to a crisp, the hurricane is going to make it very difficult to keep the flamethrower aimed at your actual target.
You see, as you land your spacecraft you have to keep frantically gimbaling the engines to maneuver the ship to a perfect three-fin touch-down on the landing pad (instead of crashing and burning). But when you are landing in an atmosphere, the accurséd wind is blowing your thrust off target. The ship designer has to calculate the compensation for this or the ship will crash every single time.
When the landing ship has slowed to below the speed of sound, the wind is not much of a problem. The nightmare is when the ship is still moving faster than sound. That is why this process is called Supersonic Retro-Propulsion.
The first stage of the Falcon 9 rocket begins its reentry burn at an altitude of 70km source NASA
Company has quietly tested Mars landing techniques with its first stage returns
In September, 2014, a Falcon 9 rocket blasted off from Florida carrying a Dragon spacecraft bound for the International Space Station. The capsule carried some notable cargo, including the first 3D printer to be tested in space as well as 20 mousetronauts to study muscle loss. Yet the most far-reaching part of that mission came after the Falcon 9 deployed its upper stage and began falling back to Earth.
As it descended into the upper levels of Earth's atmosphere, the rocket's engines fired for its "reentry burn." A few minutes later, the first stage splashed down in the Atlantic Ocean, completing one of the last flights before SpaceX began trying to land its rocket on an autonomous drone ship. But even as SpaceX was testing technology needed for terrestrial landings of its reusable Falcon 9 rocket, it was also taking some of its first steps toward landing on Mars.
That's because during that launch—and about 10 others since late 2013—SpaceX has quietly been conducting the first flight tests of a technology known as supersonic retro-propulsion—in Mars-like conditions. It did so by firing the Falcon 9's engines at an altitude of 70km down through 40km, which just happens to be where the Earth's thin upper atmosphere can act as a stand-in for the tenuous Martian atmosphere. Therefore, as the Falcon thundered toward Earth through the atmosphere at supersonic speeds and its engines fired in the opposite direction, the company might as well have been trying to land on Mars. (sub-sonic retro-propulsion is relatively easy, the Perseverance rover actually used that)
These test flights were classic SpaceX—flying a primary mission, such as delivering cargo to the International Space Station, but also piggybacking other technology demonstration missions on top of it. The company has also found ways to build Earth-based systems that will also translate to Mars. The Dragon 2 spacecraft, built to ferry astronauts to the International Space Station, has eight SuperDraco thrusters to power its launch abort system if the capsule must quickly separate from its rocket during an emergency. But SpaceX also plans to use the same thrusters for supersonic retro-propulsion in the Martian atmosphere.
Before these recent tests, however, engineers weren't sure whether this kind of advanced propulsion would work. NASA and US universities had tested supersonic retro-propulsion in computational fluid dynamics simulations and small-scale air-in-air wind tunnel tests, but not live flights. Understandably, a lot of engineers were concerned about the stability of a vehicle during the turbulent period when its rocket engine fired directly into an atmosphere it was rushing into at supersonic speeds.
SpaceX began testing supersonic retro-propulsion as far back as September 2013, when the company first flew its upgraded Falcon 9 rocket, v1.1, which had about 60 percent more thrust than the original. But even as this vehicle made its maiden flight—a test flight really—SpaceX started collecting data on a controlled descent in the Martian-relevant conditions of the upper atmosphere. A year later, amid growing interest from NASA, a space agency WB-57 airplane and a Navy NP-3D Orion aircraft trailed the Falcon as it reentered the atmosphere to capture images and thermal data.
Among those eagerly watching the flight tests was Bobby Braun, an aerospace engineer at Georgia Institute of Technology, who has led a joint research effort with SpaceX and NASA to study supersonic retro-propulsion. "I have access to all of that data, and I’ll tell you that it's worked like a charm every time," he told Ars. "The stability was manageable, and while there are still some issues, there are no showstoppers."
Propulsive landing is key to eventual human missions to the red planet for one simple reason—it scales. In 2015 Braun, Hoppy Price and a couple other engineers wrote a paper for the American Institute of Aeronautics and Astronautics describing how supersonic retro-propulsion could be used to land up to 28 tons of useful cargo on the surface of Mars. The spacecraft and rockets would be different, but the basic landing technology is the same. "This is scalable all the way up to human Mars exploration," Braun said. "What SpaceX is doing right now is quite similar to how we might land humans on Mars."
Successfully landing Dragon on Mars would be unprecedented. It likely would enter the Martian atmosphere weighing about eight tons, and it would burn two of those tons as propellant to get down to the surface. Compare that to the largest object humans have ever landed on Mars, the Curiosity rover. It started off at 3.6 tons before entering the atmosphere, and through its sky crane and other steps, it shed weight down to 900kg by the time it reached the surface.
Braun is almost uniquely positioned to say whether SpaceX might succeed. In 2010 he was named NASA's chief technologist and formulated the Space Technology program to help NASA devise advanced technologies like entry, descent, and landing that would enable human missions to Mars. Since leaving NASA he has worked with both the space agency and SpaceX on propulsive descent technologies. And he's bullish on SpaceX's chances. "This is no stunt," he said. "It’s something they’ve been working on for a while. Don't get me wrong, it is certainly a risky proposition. But you've got to give them credit. They've been testing a lot of these Mars landing technologies already here on Earth. That certainly improves their chances of success."
Just three months after that September 2014 test flight with government planes collecting data, NASA had seen enough, too. It signed a Space Act Agreement with SpaceX, saying it would provide assistance with deep-space navigation and communications if the company would share its flight data. If NASA were to try to conduct that kind of test on its own, the cost would probably exceed $2.5 billion or $3 billion, Braun said. "It’s a great deal for NASA, in my opinion, and it’s a great deal for SpaceX."
Human-scale landers require the delivery of much heavier payloads to the surface of
Mars than is possible with entry, descent, and landing (EDL) approaches used to date. A
conceptual design was developed for a 10 m diameter crewed Mars lander with an entry
mass of ~75 t that could deliver ~28 t of useful landed mass (ULM) to a zero Mars areoid, or
lower, elevation.
The EDL design centers upon use of a high ballistic coefficient blunt-body
entry vehicle and throttled supersonic retro-propulsion (SRP). The design concept includes a
26 t Mars Ascent Vehicle (MAV) that could support a crew of 2 for ~24 days, a crew of 3 for
~16 days, or a crew of 4 for ~12 days. The MAV concept is for a fully-fueled single-stage
vehicle that utilizes a single pump-fed 250 kN engine using Mono-Methyl Hydrazine (MMH)
and Mixed Oxides of Nitrogen (MON-25) propellants that would deliver the crew to a low
Mars orbit (LMO) at the end of the surface mission. The MAV concept could potentially
provide abort-to-orbit capability during much of the EDL profile in response to fault
conditions and could accommodate return to orbit for cases where the MAV had no access to
other Mars surface infrastructure.
The design concept for the descent stage utilizes six 250
kN MMH/MON-25 engines that would have very high commonality with the MAV engine.
Analysis indicates that the MAV would require ~20 t of propellant (including residuals) and
the descent stage would require ~21 t of propellant. The addition of a 12 m diameter
supersonic inflatable aerodynamic decelerator (SIAD), based on a proven flight design, was
studied as an optional method to improve the ULM fraction, reducing the required descent
propellant by ~4 t.
Nomenclature
C3
characteristic energy
ΔV
delta velocity (change in velocity)
g
acceleration, in Earth gravity units
Hz
Hertz
ISP
specific impulse
kg
kilogram
km
kilometer
kN
kilonewton
kPa
kilopascal
kWe
kilowatt, electric
m
meter
s
second
t
metric ton
I. Introduction
Human-scale landers require the delivery of much heavier payloads to the surface of Mars than previously
attempted, generally considered to be in the range of 15–40 t. Safely landing a Useful Landed Mass (ULM) of this
magnitude is unlikely to be achieved by the entry, descent, and landing (EDL) approaches used to date. Almost all
of the human-scale EDL concepts currently being considered utilize some type of heatshield system for entry and
rely on aerodynamic forces to shed a large percentage of the entry velocity. Most current concepts for large Mars
landers are not able to passively achieve subsonic velocities and must use Supersonic Retro-Propulsion (SRP) to
perform the final deceleration and a soft landing on the Martian surface.
The key feature of the concept in this study is the use of a high ballistic coefficient 10 m diameter rigid entry
body coupled with SRP. Although blunt body entry vehicles are the standard for Mars, all past flight systems have
had ballistic coefficients less than 150 kg/m2 (most less than 100 kg/m2). These past EDL approaches utilized
supersonic parachutes to achieve the relatively low ballistic coefficients required to achieve subsonic descent
conditions in the thin atmosphere of Mars. In the present architecture, the parachute supersonic deployment
constraint is removed, allowing the bulk of the deceleration to occur at a lower altitude (5 km or less) where the
atmospheric density is thicker and less uncertain. Flying nearly-horizontal, at hypersonic speeds, and at low altitude
places additional constraints on the trajectory, landing ellipse, and terminal control strategy. Sensing strategies can
be developed, however, and trajectories developed and targeted for most sites of scientific interest at or below 0 km
areoid. Removal of the supersonic parachute deployment constraint allows the present architecture to carry a much
larger entry mass for a given entry body diameter. The use of high thrust-to-weight SRP (initiating between Mach 3
and 4) couples elegantly with this approach. Despite the low altitude at SRP initiation, the flight path is shallow, the
descent rate is low, and SRP can arrest the remaining velocity with relatively little gravity loss.
This study presents an example of a possible lander architecture and is intended as input to the NASA human
spaceflight planning process.
V. Description of Lander Concept
Figure 4. Entry, descent, and landing sequence. click for larger image
The EDL sequence adopted for this study is depicted in Fig. 4. The vehicle would enter the Martian atmosphere
using its heatshield in a manner similar to previous Mars landings. As the lander was slowed by aerodynamic forces,
it would go through a phase of peak heating with a deceleration of about 6 g. The time span for pure aerodynamic
breaking would be about 3 minutes.
At about Mach 3.5, the backshell would be jettisoned, and six 250-kN rocket engines would be ignited to begin
the SRP phase of descent. The heatshield would have mechanisms to open six areas in the heatshield for the engines
to fire through. These could be hatches that slide out of the way or plugs that are blown out by the engines.
The vehicle would be decelerated and steered toward the designated landing site using Terrain Relative Navigation
(TRN). At Mach 1.8 or lower, the dynamic pressure would be low enough to jettison the heatshield. When the
vehicle reaches a target altitude of 40 m, four of the engines would be shut down, and the two remaining engines
would be throttled down and gimbaled outward to an angle of about 50° from vertical. This is done to reduce the
thrust-to-weight ratio to slightly less than 1 and allow for a constant velocity phase final descent to the surface, with
terminal guidance to meet a precise target.
Gimbaling the engines out to a large angle for terminal descent provides other benefits. It should significantly
reduce, if not eliminate, soil and surface erosion directly underneath the vehicle and blow much of the debris out and
away rather than up toward the lander. The lander can be clocked to a preferred orientation in order to blow debris in
directions away from nearby surface assets. Gimbaling the engines outward can also provide a clear downward field
of view for terminal guidance sensors, so as not to be obscured by the rocket plumes.
Thrust would be terminated at or just before touchdown, ensuring a final touchdown velocity under 5 m/s. The
landing gear reference design for this concept has telescoping tubular legs that deploy the footpads to a distance of
about 2 m below the bottom of the main structural cone, providing large ground clearance and a long stroke for the
shock absorbing system. The powered phase of the descent would be less than 1 minute long.
Since the MAV is fully fueled and can provide ~4.2 km/s of ΔV, it is conceivable that it could provide abort-toorbit
for most of the failure modes that might be encountered after the lander is past the peak heating portion of EDL.
For example, in the event of a descent engine failure, the lander should be able to reorient to a MAV-forward flight. At
that point, descent stage propulsion would be shut down, and the MAV would be ignited, separated from the lander,
and used to carry the crew back up to LMO for eventual rendezvous and docking with the pre-placed orbital transfer
stage.
IX. Supersonic Retro-Propulsion
In this investigation, the propulsive capability currently utilized during subsonic descent is extended to
supersonic initiation velocities (i.e. supersonic retro-propulsion). SRP descent architectures offer the ability to land
larger payload masses while providing additional control authority (thrust-vectoring and throttling) throughout the
descent. SRP scales well across large-scale robotic and human exploration missions and affords both cost and
technology feed-forward benefits for large-scale missions. As entry vehicle and landed mass requirements increase,
the benefits of SRP become more significant, while the use of alternative decelerator technologies become more
challenging.
SRP was identified as a technology investment area in NASA’s Space Technology Entry, Descent and Landing
Roadmap and was recently cited as a high priority in the National Research Council (NRC) Life and Physical
Sciences Survey, Recapturing a Future for Space Exploration: Life and Physical Sciences Research for a New Era.
In addition, SRP was identified as a “critical path technology” and baselined in a large number of the NASA Mars
EDL systems analysis concepts.
Initially studied in the 1960s, interest in SRP technology has been recently renewed. Technology efforts from
2005 to 2012 focused on gaining a fundamental understanding of aerodynamic-propulsive fluid dynamic interactions
with cold gas plumes at supersonic freestream conditions. Systems analysis, computational fluid dynamics (CFD)
simulations, and small-scale air-in-air wind tunnel testing were also performed in this timeframe. Blunt body
aeroshell configurations, similar to the concept baselined in this investigation, have been the focus of these efforts.
Flight dynamics simulations have demonstrated that SRP initiation generally occurs at a minimum altitude boundary
subject to subsequent timeline constraints, with resulting high values of thrust. SRP can also be utilized as additional
control authority for precision landing. CFD tools have been shown to be capable of capturing major flowfield
features, including unsteadiness, albeit at considerable computational expense.
From 2013 to 2015, through a partnership with SpaceX, NASA received its first insight into the performance of
a flight-qualified propulsion system operated into an opposing supersonic freestream. These efforts focused on
analysis of Space X first stage recovery flight data. To return this launch stage safely to Earth, operation of its
propulsion system in the supersonic regime at the right altitudes on Earth to yield Mars-relevant conditions is
required. To date, Space X has performed SRP maneuvers during recovery operations of seven Falcon 9 first-stage
systems. NASA personnel have independently reviewed these data sets. Multiple flights are in the specific Mach and
dynamic pressure regime required by the present Mars EDL system. While the Space X first stage is not Mars-like
in configuration, no showstoppers have been identified for this technology.
SRP computational, ground-based, and flight data have demonstrated that aerodynamic force and moment
modeling uncertainty in the SRP phase is low for steady state, Mars-relevant conditions. Some uncertainty remains
for SRP operation during startup and transition to steady-state operation, but performance uncertainty during this
small time period may be mitigated by robust control system design. Combined with ground-based test data, the
Space X flight data bounds the range of SRP thrust coefficients needed for human Mars EDL. Taken in total, these
computational, ground-based, and flight test efforts significantly reduce the SRP flight system development risks for
Mars EDL.
The effects of supersonic nozzle flow exhausting from a
blunt body opposing a supersonic or hypersonic freestream
result in an interaction between the nozzle flow and the
detached bow shock. Resultant flowfields surrounding
blunt bodies with no retropropulsion, configurations with
nozzle flow from the center of the vehicle forebody, and
configurations with nozzle flow from the periphery of the
vehicle forebody each exhibit fundamentally different
behavior. Flowfield geometry and stability are highly
dependent on the nozzle location (central vs. peripheral) and
the relative strength of the nozzle flow, often given as a
function of the ratio of the total pressure of the jet flow to
the total pressure of the freestream. For a fixed set of
freestream conditions, namely freestream total pressure, the
strength of the nozzle flow as compared to the freestream
can be characterized by the propulsive effort alone, or thrust
coefficient. To compare resultant effects at different
freestream conditions, the total pressure ratio must be used;
the thrust coefficient is used for convenience when the
freestream conditions are fixed.
Central Retropropulsion Configurations
Figure 2. Example of a Central Retropropulsion Configuration with a Single Nozzle
The majority of the literature focuses on retropropulsion
configurations where either a single nozzle or small cluster
of nozzles is located along the body centerline on the
forebody. An example of a central retropropulsion
configuration with a single nozzle is shown in Figure 2.
Figure 3 illustrates the characteristic
flowfield features for a central configuration and the
complexity of the interaction between the nozzle flow and
the freestream shock structure. The primary flow structures
are the bow shock, free stagnation point, jet terminal shock,
and the recirculation regions. The location, degree of
formation, and stability of these features are a strong
function of the ratio of jet total pressure to freestream total
pressure. This total pressure ratio is often represented by
thrust coefficient, assuming a fixed freestream stagnation
pressure for a given test condition.
The entire flowfield structure is dependent on the formation
of the stagnation point. The freestream must decelerate to
zero velocity, first from supersonic to subsonic through a
shock wave, then from subsonic to zero velocity at the
stagnation point. The nozzle flow undergoes a similar
deceleration through mixing, viscous dissipation, or a
normal shock, depending on the strength of the nozzle
exhaust flow. The stagnation region consists of two
supersonic regions, the freestream and nozzle flow, and a
subsonic region divided by a contact discontinuity, the
stagnation point.
Figure 3. Characteristic Flowfield
Figure 4. Stability Transitions With Increasing Jet Flow
for Central Configurations (CFD Solutions)
The interaction of the jet with the opposing supersonic
freestream in central configurations has been observed to
cause the flowfield to transition from stable to highly
unstable and back to stable as the total pressure ratio
increases. This behavior is shown by Mach
number contours in Figure 4. A stable flowfield occurs
when the bow shock is close to the body, and the jet flow
does not penetrate the bow shock; in this case, the flowfield
structure is not oscillating. An unstable flowfield occurs
when the jet shock penetrates the bow shock and the total
shock displacement is significantly greater than the
displacement characteristic of the stable condition. This
displacement increases to a maximum with increasing total
pressure ration and then collapses back to a displacement
similar to the original stable case.
This stability transition phenomenon is not thoroughly
understood. However, the boundaries of the different flow
regimes can be partially correlated to changes in relative
mass flow and by increases in the ratio of jet total pressure
to freestream total pressure. At low flow rates (low total
pressure ratios), the exhaust flow is retained within the
boundary layer and lacks sufficient momentum to disturb
the bow shock.
As the nozzle flow rate increases, the nozzle flow cannot be
contained within the boundary layer and begins to interact
with the bow shock. The shock standoff distance increases
proportionally with increasing nozzle flow until reaching a
maximum displacement on the order of 6-7 body diameters. In this unstable regime, the dissipative mechanism
that allows the jet stagnation pressure to equal the
freestream stagnation pressure at the interface is viscosity.
These viscous losses require a greater jet length for the
pressure adjustment to occur.
As the flow rate increases further, the shock standoff
distance rapidly decreases, and the entire flow structure
collapses back to a stable condition. In this case, the
dissipative mechanism is a terminal shock, with the
resulting subsonic jet flow stable enough to form a clear
stagnation point. The nozzle exit Mach number
determines the expansion condition of the jet flow
(underexpanded or overexpanded), hence determining
which of the dissipative mechanisms is dominant. Mixing
and viscous dissipation is typically associated with
underexpanded jet flow, and shock dissipation is common
of overexpanded jet flow. This transition from a
stable flowfield to an unstable flowfield occurs at lower
thrust coefficients for smaller nozzles and at larger
coefficients for larger nozzles, indicating dependence on the
ratio of nozzle exit diameter to body diameter.
In a case with multiple nozzles arranged about the body axis
of symmetry close to the vehicle centerline, Peterson and
McKenzie observed the same stability transitions as
seen for the single, centrally-located nozzle. At low flow
rates, the nozzle flows do not interact with one another.
However, as the flow rate increases, the individual jet flows
begin to coalesce into a single jet flow and interact with the
bow shock, resulting in large shock displacement.
Figure 5. Example of a Peripheral Retropropulsion
Configuration
Peripheral Retropropulsion Configurations
In contrast to the central retropropulsion configuration, few
references are available on retropropulsion configurations
with nozzles at the periphery of the forebody. The primary
documented investigations on peripheral configurations are
experimental work by Jarvinen and Adams and
Keyes and Hefner.
In a peripheral retropropulsion configuration, such as the
one shown in Figure 5, the nozzle flow interacts with the
bow shock differently than in a central configuration. The
flow from each nozzle is swept away from the forebody and,
at low flow rates, diffused into the opposing freestream by
mixing. Accordingly, flowfields for peripheral
configurations do not have the large recirculation regions
over the body surface characteristic of central
configurations. Rather, the flowfield has a uniform region
of high pressure inboard of the nozzles, resulting from the
lack of disturbance to the portion of the bow shock nearest
the nose of the blunt body. A smaller flow turning angle is
required than for a central configuration, preventing the
nozzle flow from disturbing the center of the bow shock.
As the thrust coefficient increases, the bow shock standoff
distance increases. With additional increases, the resultant
flowfield becomes increasingly unsteady as the jets begin to
disturb the bow shock. The nozzle flow now diffuses
through a terminal shock instead of mixing with the
freestream. Both Jarvinen and Adams and
Keyes and Hefner observed local instabilities affecting
the slope of the bow shock as the total thrust coefficient
increased beyond approximately 3.0. Despite local
instabilities causing rippling of the bow shock, the sharp
increase in standoff distance and dissolution of the bow
shock seen with the central nozzle configuration have not
been observed with the peripheral nozzle configuration.
Future work will be required to fully characterize the
flowfield stability of configurations with peripheral nozzles.
So the problem of landing is to ensure that your downward velocity and altitude above the landing pad both reach zero simultaneously. The Apollo Lunar Module burned enough to come to a stop at some distance above the ground, and hover. Then it gradually throttled down the engine, which gently lowered the spacecraft to the Lunar surface. For all the Apollo landings this was done manually by a human pilot.
The SpaceX Falcon 9 first stage cannot do that. The problem is at that point in the flight the first stage cannot hover. Not under one Terran gravity at any rate.
When the first stage is trying to land, almost all the fuel is gone, so its mass is minuscule. Even if it turns off eight of the nine engines, and throttles the remaining engine down to minimum (50% of full thrust), the acceleration is still greater than one gee (thrust-to-weight ratio is greater than one). With one engine at minimum the stage will go skyward, with all engines off it will plummet to the ground, but it cannot just hover at a given altitude.
Faced with this problem, the ingenious engineers at SpaceX came up with an innovative solution: the Hover-Slam (unofficial name, SpaceX has not revealed what the official term is). Which player of the game Kerbal Space Program call the Suicide Burn. Robert Heinlein compares it to catching a falling egg on a plate without breaking it.
A sophisticated computer program precisely calculates thrust and altitude to smoothly bring the spacecraft to zero downward velocity on the ground, not hovering at a low altitude. In a single burn. And taking into account the high minimum thrust. Remember that for landing the stage starts with a velocity of four times the speed of sound (about 1,400 m/s).
If you start the burn too late, you crash (you'd reach zero altitude before zero velocity). If you start the burn too soon, you eventually go back upwards and then crash (you'd reach zero velocity before zero altitude, and start to ascend). You have to start it exactly on time, the Falcon 9 landing jacks can only handle a landing jolt up to six meters per second.
The horizontal vectors also need to be very small, or you will skid on the landing pad and tip over. The ship need to be vertical or it will tip over. Keeping in mind that tipping over means the stage explodes (what SpaceX calls Rapid Unscheduled Disassembly or RUD) since the fuel tank walls are necessarily flimsy and the tanks still contains dangerous amounts of fuel.
And you have to hit within a couple of meters the center of the landing pad.
Landing like this probably almost impossible for a human pilot to do (hence "suicide burn"), but SpaceX doesn't care: it uses computer to control everything.
The cherry on the top of the hover-slam sundae is the fact that it is far more fuel efficient than a hover-and-lower. Which always brings a smile to the face of the bean-counters in the accounting department. And more hand-fulls of hair yanked out by your competitors due to their despair at competing with you.
CATCHING AN EGG ON A PLATE
artwork by Michael Whelan
A daisy-clipping orbit of Luna (assuming that Luna has daisies, which seems unlikely) takes an hour and forty-eight minutes and some seconds. Golden Rule, being three hundred kilometers higher than a tall daisy, has to go farther than the circumference of Luna (10,919 kilometers), namely 12,805 kilometers. Almost two thousand kilometers farther — so it has to go faster. Right?
Wrong. (I cheated.)
The most cock-eyed, contrary to all common sense, difficult aspect of ballistics around a planet is this: To speed up, you slow down; to slow down, you speed up.
I'm sorry. That's the way it is. We were in the same orbit as Golden Rule, three hundred klicks above Luna, and floating along with the habitat at one and a half kilometers per second (1.54477 k/s is what I punched into the pilot computer … because that was what it said on the crib sheet I got in Dockweiler's office). In order to get down to the surface I had to get into a lower (and faster) orbit … and the way to do that was to slow down.
But it was more complex than that. An airless landing requires that you get down to the lowest (and fastest) orbit … but you have to kill that speed so that you arrive at contact with the ground at zero relative speed — you must keep bending it down so that contact is straight down and without a bump (or not much) (or you'll tip over) and without a skid (or not much) (or you'll tip over) — what they call a "synergistic" orbit (hard to spell and even harder to calculate). But it can be done. Armstrong and Aldrin did it right the first time. (No second chances!) But despite all their careful mathematics it turned out there was one hell of a big rock in their way. Sheer virtuosity and a hatful of fuel bought them a landing they could walk away from. (If they had not had that hatful of fuel left, would space travel have been delayed half a century or so? We don't honor our pioneers enough.)
There is another way to land. Stop dead right over the spot where you want to touch down. Fall like a rock. Brake with your jet so precisely that you kiss the ground like a juggler catching an egg on a plate(a hover-slam). One minor difficulty — Right-angled turns are about the most no-good piloting one can do. You waste delta vee something scandalous — your boat probably doesn't carry that much fuel. ("Delta vee" — pilot's jargon for "change in velocity" because, in equations, Greek letter delta means a fractional change and "v" stands for velocity — and please remember that "velocity" is a direction as well as a speed, which is why rocket ships don't make U-turns.)
Our Moon being an airless planet, a torchship can land on it (an atmosphere converts the torchship exhaust into a deadly nuclear air burst with wide-ranging devastation). But the Tom Paine, being a torchship, was really intended to stay in space and be serviced only at space stations in orbit; she had to be landed in a cradle (translation: Tom Paine is an orbit-to-orbit ship, it has no landing gear. A cradle is a framework that holds the torchship.).
I wish I had been awake to see it, for they say that catching an egg on a plate is easy by comparison. Dak was one of the half dozen pilots who could do it.
I suggested in the middle of a couple of recent posts that the hoverslam techniques pioneered by SpaceX with the Falcon9 be used for Lunar landings. It was a kind of throwaway thought along with several other suggestions. As I think about it though, it seems to me that there might be a serious possible schedule and reliability gain from adapting the technique to Lunar development. That’s why I’m putting it up as a separate post.
I didn’t think hoverslam was a viable technique until it had been demonstrated. I was wrong. Now that it has been demonstrated multiple times, it may be time to see if there are more applications in which it might give an advantage. Lunar landings being the application under discussion recently, I want to lay out a few possibilities.
First thing would be a discussion with the team that is already using the technique in operational vehicles. From the outside looking in, it appears that hoverslam is a software solution to landings that was previously considered a hardware development problem. If this thought is accurate, then it may not be necessary to develop engines and control systems that allow an empty tank vehicle to hover in 1/6 gee. It seems that it is a requirement to bring velocity to zero at the instant that altitude is zero with thrust/weight being far less relevant than most of us previously thought possible. It seems that the SpaceX team is landing with thrust/weight levels of well over two on Earth, which would be well over a dozen at the Lunar surface.
If a Lunar lander is at 20 tons at touchdown, then the hovering that most of us consider a requirement would need engines capable of throttling to 3 tons for a gentle descent at very low velocities. The experience of Apollo 11 finding a clear landing area validates this opinion. This is however, not 1969. The Lunar surface is not only far better known now, but any potential landing sites could be imaged to near centimeter precision at relatively low cost. So hovering while making sure of a clear landing zone may not be a requirement. Navigation to the clear areas is also much less of a challenge than a half century ago. So it may be possible to go straight in to a site on near side without even orbiting first. It may be possible to land that 20 ton vehicle with engines that will only throttle down to 50 or 60 tons.
Doug believes that getting funding authorities to sign off on Lunar hoverslam would be a nonstarter. He is right unless the technique is fully validated just as it was on Earth/barge. I suggest the first step would be an RFI to SpaceX to confirm that it would or would not be possible to use the technique in this manner. If the answer is affirmative, then a test mission could be envisioned. For a test mission, perhaps an upper stage of the Falcon9 could be refueled by a Facon9 tanker in Earth orbit to validate tanker technology as well before sending it on to the Lunar surface.
The Falcon9 upper stage with one refueling should be able to place well over 5 tons on the Lunar surface during the test mission if the concept is valid. Depending on the flight backlog and the interest of both NASA and SpaceX, this could fly by Q4 2018. I doubt any other system could land a comparable payload in anything close to that time frame regardless of interest. Cost would be for two Falcon9s plus payload and Lunar operations. 5 tons in useable condition on the Lunar surface would go a long way towards convincing a funding authority to further use the technique for unmanned payloads.
Central to acceptance of the concept would be the failure modes. Obviously a high enough speed impact would destroy the stage and cargo. Hitting a rock with a landing leg and tipping over could be almost eliminated with a good survey and navigation. A sideways vector on landing that tipped the stage over should not be a factor with the current experience level. The most likely failure modes would seem to be engine failure at altitude from fuel depletion, and excess velocity at touchdown from software or navigation error.
Payloads on the first flight(s) should be very robust as well as being useful so that good work can be done even with a less than successful landing. During an excessive velocity landing, the stage propellant tanks provide a crumple zone if done right. An impact at 100 m/s (200 mph) in the vertical orientation could subject the payload to under 10 gees which is survivable to most hardware. It should be expected that the first payload may have to cut its’ way out of the wreckage before deploying solar panels and starting the primary mission. If the stage soft lands but with a side component that tips it over in the 1/6 gee, the payload should also see less than 10 gees.
The spectacular failures we saw from the early Falcon9 barging attempts were almost all from residual propellant exploding. Though technically not detonations, the burns were fast enough that most of us would call it a good boom. The vertical and horizontal vectors on most of the early Falcon9 barging attempts would have been payload survivable without the propellant reactions on impact. In the vacuum at the Lunar surface there would be no reaction from residual propellants in a crash other than fast evaporation and site contamination. All of those spectacular RUDs on the barge would have been stage lost and payload delivered on the Lunar surface.
I suggest that this concept be considered at some low level to see if there is any merit to it. If there is, it could speed up Lunar development by several years and save a few Dirksens.
Landing a tail-sitter is a problem. It is almost impossible for the pilot to see the landing site because the exhaust is in the way. At least when the ship is close enough to the ground that the exhaust plume starts blowing dirt around. The Apollo Lunar Module had special outward angled windows to let the pilot see the landing point, while the ship was high enough. When the LEM got too low, the pilot relied upon the landing sensors.
Apollo Lunar Module window, note how they are aimed downward
Notice how the pilot cannot see what they are landing on, or even the landing legs. from AIAA 2006-7517-146
artwork by Robert Watts
In the Three-man Space Scout note the Ground Reflecting Periscope Mirrors. The three transparent blisters on the flight deck help the pilot to land by providing full ground visibility via a system of reflecting mirrors.
The Apollo lunar module had a three-beam Doppler velocity sensor and a radar altimeter. This gives the pilot the spacecraft's velocity relative to the the ground, and how close to the ground you are.
As previously mentioned, when the ship is very close to the ground, the rocket exhaust blows dirt around such that the pilot cannot see anything. So the lunar module had contact probes on the landing pads. These were about 1.5 meters long. When the lunar module was low enough that the probes actually touched the surface, the contact lights on the pilot's control panel would light up. The probes were like a visually impaired person's white cane
Originally there were four contact probes, but later NASA removed the probe on the leg with the ladder. It seemed like a bad idea to send an astronaut in an inflated puncture-prone space suit down a ladder where awaits a pointy contact probe been bent upwards like a spear covered in gold foil.
Apollo Lunar Module with contact probes on the landing pads
Apollo Lunar Module with contact probes bent after landing
Apollo Lunar Module with contact probes bent after landing
LUNAR SURFACE SENSING PROBES
When touching down on the lunar surface, the Apollo lunar module could be
damaged from the descent propulsion system engine exhaust gases, either because
they would blow debris from the surface or simply from the blast bouncing off
the surface and back at the LM. Thus, they needed to stop the engine when they
were still several feet off of the lunar surface. There were concerns (which
turned out to be well-founded) that dust blown up might obscure the astronauts'
sight during the final moments before touchdown.
The solution to this dilemma was the use of lunar surface sensing
probes. Mounted on the bottom of the landing gear's foot pad, they were
essentially five-foot-long "feelers": Once one touched the lunar
surface, a lunar surface "contact light" lit,
indicating to the crew that they were in close proximity to the surface and
that they should cut the DPS engine.
You can hear Aldrin call, "Contact
light" during the Apollo 11 landing.
Originally, all four legs of the lunar module had contact probes (refer, e.g.,
to AS09-21-3199,
showing Spider, Apollo
9's lunar module, in earth orbit). The contact probe was removed from the
leg of the lunar module containing the egress ladder, out of fears that it
would bend and jut up toward the ladder, ready to puncture a pressure suit.
Starting with Apollo 11,
only three legs sported probes.
Of course, having what amounted to five-foot spikes protruding from the bottom
of the landing pads wouldn't do the S-IVB's liquid hydrogen tank any good (when
the LM was nestled in the SLA during launch), so the probes were folded up
toward the LM, as shown on Apollo
10's lunar module (photo S69-17810).
The lunar surface sensing probe attached to each landing gear footpad is an
electromechanical device. The probes are retained in the stowed position,
against the primary strut, until landing gear deployment. During deployment,
mechanical interlocks are released permitting spring energy to extend the
probes so that the probe head is approximately 5 feet below the footpad. When
any probe touches the lunar surface, pressure on the probe head will complete
the circuit that advises the astronauts to shut down the descent engine. This
shutdown point which determines LM velocity at impact, is a tradeoff between
landing gear design weight and the thermal and thrust reactions caused by the
descent engine operating near the lunar surface. Each probe has indicator
plates attached to it, which, when aligned, indicate that the probes are fully
extended.
A contact probe (called a "touch down shoe") was also used in the lunar ships featured in Collier's Man Will Conquer Space Soon! series. Which isn't surprising since Wernher von Braun had a hand in creating both.
The spacecraft in First Men to the Moon by Wernher von Braun had a sort of landing sensor, but I'm not sure I understand how the thing functioned.
LANDING SPIKE
With two adjustment knobs he now kept a pair of
movable cross hairlines bracketed on the predetermined landing spot. By turning his two knobs, John
could override the automatically controlled flight
path guidance of the ship and thus avoid boulders or
crevices in the immediate launching area, too small
to have appeared on the photographic plates. He also
used the knobs to eliminate any drift the ship might
have with respect to the lunar surface itself. A horizontal movement right or left of as little as a few
feet per second as they touched down could shear off
the ship’s landing gear.
At a few thousand feet above the ground John
called briskly to Larry, and four spider legs were
hydraulically extended, followed by a fifth, central
leg which was lowered through the fiery exhaust.
This central leg would be the first to make contact
with the ground. It was a strong spike about fifteen
feet long, with a built-in shock absorber. Several
horizontal discs were pushed over the spike, the
smallest discs at the lowermost tip and the largest at
the root of the spike. None of the scientists at home
had been able to predict precisely the hardness of the
lunar soil at the landing point. The geologists had
said they might hit anything from a layer several feet
deep of volcanic ash to a rather hard surface of
pumice rock. Using a spike with cross plates, safe
tail-first landings had been demonstrated back home
on a wide variety of surfaces.
The way I am reading it, the spike has to be capable of retracting all the way back into the body of the spacecraft. Otherwise, if the lunar surface is too hard, the spike will be unable to penetrate and the ship will topple over.
My guess is that the spike helps the ship cope if the lunar surface has the firmness of one hundred feet of corn-flakes cereal. The spike will imbed itself into fluffy soil and help prevent the ship from falling over. Otherwise the ship will either slowly sink into the ground, never to be seen again; or uneven settling of the individual landing legs will allow the ship to topple.
Presumably after Luna had been explored a bit, the spike could be omitted.
Landing Legs
As a side note, there is a good reason for having either three landing legs/fins or adjustable landing legs. Have you ever had to sit on a stool or chair with four legs, and one of the legs was shorter than the other? You sort of rock back and forth. This is annoying for a seated person, but can be disastrous for a sixty meter tall rocketship. In Andre Norton's space novels, the height of a pilot's skill was to make a "perfect three-fin landing".
The reason for the rocking is that three points automatically determine a plane, but four or more points are not guaranteed to. If you have four or more, the landing jacks had better be adjustable, or you will only be able to land on a perfectly flat surface. Don't even think about a landing on a random spot on the rocky planes of Luna.
SPACE CADET
"Nice landing, Skipper!" called out Oscar.
"Yea bo!" agreed Tex.
"Thanks, fellows. Well, let's get the stilts down." He punched a stud on the control board. Like most rockets built for jet landings, the jeep was fitted with three stabilizing jacks which came telescoping out of the craft's sides and slanting downward. Hydraulic pressure forced them down until they touched something solid enough to hold them, whereupon the thrusting force was automatically cut off and they locked in place, propping the rocket on three sides, tripod fashion, and holding it erect.
Thurlow waited until three little green lights appeared under the stud controlling the stilts, then unclutched the jeep's stabilizing gyros. The jeep held steady, he unstrapped. "All right, men. Let's take a look. Matt and Tex, stay inside. Oscar, if you don't mind my mentioning it, since it's your home town, you should do the honors."
From Space Cadet by Robert Heinlein (1948)
A bus' "gravity line" is a line drawn from its center of gravity to the planet's center of gravity. If the bus is tipped enough so that the gravity line falls outside of the wheelbase, the bus topples over. For road vehicles this is called a tilt test.
In the diagram, the gravity line is blue, and the center of gravity is the black-and-white crossed disc.
A vehicle is more stable the wider its wheelbase, and the lower its center of gravity.
Both vehicles are tipped at the same angle, but only the unstable vehicle topples over.
How they proved that London's Double-decker buses were not a tipping hazard (1933)
A rocket, side view
Three-finned rocket top view
Black/white disk is center of gravity
Yellow triangular area is safe area "base limit".
If rocket tips enough so that center of gravity leaves the safe area, the rocket topples over
Four-finned rocket top view
Note how much larger the yellow square safe area is
Of course there is an argument for four or more landing legs. Imagine you are looking at the rocket from overhead. Draw dotted lines from the foot pad of each leg to the adjacent pads. With three legs you'll have a triangle. The key point is that if from your overhead view the rocket's center of gravity moves outside of the triangle, the rocket will topple over and crash.
This can happen if you have the misfortune to be landing on a slope, and a single pad touches down first on the up slope section. As the other two pads lower, the already landed pad will force the rocket off vertical until it topples. The rocket can also tip a bit if it is moving a bit sideways as it comes down. The two pads bracketing the sideways direction can dig in and stop while the nose of the rocket is still moving, causing a tip.
The advantage of four pads is that now you have the dotted lines forming a square. This increases the distance the center of gravity has to move in order to topple, which increases your safely margin.
Topple resistant spacecraft Artwork by Fred Kirberger
If you go with more than three landing pads, just make the landing legs adjustable in length to deal with the "rocking stool" problem.
Mike Williams points out the extra mass problem of four landing pads:
A possibly significant advantage of three landing jacks is that they all get approximately evenly loaded when you land on an uneven surface. With four jacks you either have to build them strong enough that the heavily loaded jacks can take the strain, or add some sort of compensating mechanism (which would require extra mass).
If the feet are distance D from the centre, then with 4 feet the rocket can be stable with the center of gravity up to cos(45°)*D from the centre (i.e., 0.707*D). For a ship with 3 feet, to achieve the same stability, you'd need to extend the feet to be 1.414*D from the centre.
(ed note: For a ship with 3 feet the rocket can be stable with the center of gravity up to cos(60°)*D from the centre (i.e., 0.5*D)
A four-footed rocket with feet 10 meters from center would have a safe area within 7.07 meters of center. But for a three-footed rocket with feet 10 meters from center, the safe area would be only 5 meters in diameter.
How do you make a three-footed rocket's safe area the same as the four-footed rocket? You have to make the distance of the feet from center larger.
How much larger? cos(45°) / cos(60°) = 1.414. So you take the foot distance of the four-footed rocket, muliply by 1.414, and you have the required foot distance of the three-footed rocket.
In this case, 10 meters times 1.414 equals 14.14 meters. A three-footed rocket with a foot distance of 14.14 meters would have a safe area of 7.07 meters, the same as a four-footed rocket with a foot distance of 10 meters.)
It may well be that three such extensions require less mass than adding a fourth leg. (that is, three legs that are 14.14 meters long might have less mass than four legs that are 10 meters long)
There are probably swings and roundabouts, with one system being slightly superior than the other depending on other factors of the design, such as the mass of the feet (which still mass the same when you increase the length of three legs, but if you have four legs you need to budget for a whole extra foot).
Four-footed rocket with feet 10 meters from center. Safe area is within 7.07 meters of center.
cos(45°)×10 meters = 7.07 meters
Yellow lines are drawn between the feet
The safe area is the red circle, the smallest circle that can fit inside the yellow box.
Blue is the distance of the foot from the center
Green is the radius of the red circle, the safe area
Three-footed rocket with feet 10 meter from center. Same feet distance, but the safe area is only within 5 meters of center.
cos(60°)×10 meters = 5 meters
See how the red circle is smaller than the one for the four-footed rocket
In order for three-footed rocket to have a safe area of 7.07 meters of center (like the four-footed rocket), the feet have to be 14.14 meters from center instead of 10 meters.
cos(45°) / cos(60°) = 1.414
1.414×10 meters = 14.14 meters
cos(60°)×14.14 meters = 7.07 meters
See how the red circle is the exact same size as the one for the four-footed rocket
Mike Williams
But if safety is primary, Bernard Peek notes that current European safety legislation requires office chairs to have five castors so that losing one is not a catastrophic failure.
Sean Willard brought to my attention an important mathematical proof. It has been proven that if:
you have a four legged structure
all the legs are exactly the same length
the ground is a continuous surface with a local slope of no more than fifteen degrees
you rotate the structure around the plane of the feet
it will always be possible to find a position where the structure does not rock back and forth. And you won't have to rotate the feet more than ninety degrees, either.
Please note that the non-rocking position is not guaranteed to be level. If you want the intricate details, you will find them in this paper.
Sean goes on to say:
One could therefore devise a system comprising high-resolution landing radar or lidar (perhaps four antennae, one on each leg), computer, and attitude jets, to automatically rotate the ship as it lands to the optimum orientation. It would be quite difficult for a human helmsman, but maybe not fiendishly so, given the right instrumentation.
Sean Willard
DESIGNING ROUGH-FIELD CAPABILITY INTO THE SPACEX STARSHIP
Bear in mind that Starship is Spacex’s new name for what was
once the BFS second stage spacecraft article of its BFR/BFS system. To be useful at Mars or the moon, this spacecraft must be able to make
rough-field landings. Its mass is
heaviest when fueled for launch.
Initially, it must be refueled
for use at Mars, and eventually, also the moon. These static loads are larger than the
landing weights, even factored for
dynamical impact.
There are two parts to this:
(1) tip-over on rough or sloping surfaces, and (2) not exceeding the bearing load
capability of the natural surfaces.
There is also a new idea presented here for creating very large landing
pad surfaces that fold so as not obstruct airflow, in a very practical way.
The tip-over problem was well-explored in another article on
this site, as part of updates to the
basic performance evaluation article. That
article was “Reverse-Engineering the 2017 Version of the Spacex BFR” dated
April 17, 2018. The same article identified soil bearing strengths
as likely inadequate to support the spacecraft when refueled for launch.
The related article “Relevant Data for the 2018 BFS Second
Stage” dated September 24, 2018, included among other things a way to
reconfigure the round tip-mounted landing pads into oblong pads of increased
area. Those results were still
inadequate for the loose fine sand-like surfaces of much of Mars.
Figure 1 – Fold-Out Panels as Rough Field Large Landing Pads
What is analyzed here is a different landing pad idea, depicted in Figure 1. Essentially, panels resembling landing gear bay doors are
built into each side of each fin tip,
with hinge lines at the aft trailing edge (which is the touchdown
surface otherwise). Unfolded hydraulically,
these panels become very large landing pad surfaces. Folded,
they do not protrude into the ascent or descent airstreams at all.
The same figure shows an 1100 metric ton fueled mass, which really could be as large as
1300-something tons. However, the BFS weight statement is still not known
publicly with any certainty. This figure
is in the same ballpark, given all the
other uncertainties.
Assuming 1100 metric tons of mass, the weights on Earth, moon,
and Mars are given in the figure.
The bearing pressures associated with those weights are also shown, assuming 2 m by 2 m parallelogram-shaped
folding panels are used. This assumes 2
panels per fin, and 3 fins. Just that initial assumption provides some 10
times the bearing area as the roughly 1 m diameter round tip pads shown in the
Spacex illustrations of this vehicle.
Figure 2 – Representative Soil Bearing Strengths for Various Earthly Surfaces
Figure 2 presents safe load-bearing strengths for civil
engineering purposes of various types of Earthly surfaces. These came from an older-vintage Marks’
Mechanical Engineer’s Handbook. No such
reference yet exists for lunar or Martian soils. However,
experiences from the Apollo missions verify that the lunar regolith is
similar to fine, loose Earthly
sand.
Experiences with the various Mars landers and rovers suggest
that much of Mars is similar to lunar regolith and to Earthly fine, loose sand.
Some of Mars seems to have a mix of sand, gravel and larger rocks, perhaps similar to Earthly surfaces such as
loose beds of medium and coarse sand, or
perhaps even as substantial as beds of coarse sand with gravel. These require picking, not a spade,
to remove. A hard clay requiring picking would also be
of similar bearing strength.
All of this is indicated in Figure 2.
Figure 3 – Relating Landing Pad Areas to Soil Bearing Strengths
Figure 3 compares applied bearing loads to soil strengths for
the moon, Mars, and Earth.
The moon is the least demanding problem because of its lowest
gravity. A design adequate for the moon
is adequate only for some of Mars: the
indicated folding-panel parallelogram dimensions would be 2.2 m by 2.2 m, for about 29 sq. m bearing area. On Earth,
sites must be strong, well-packed
sand/gravel or hard clay. No
beaches, no sand dunes, no soft desert.
Figure 4 – Tradeoff of Increasing Pad Size vs Landing Site Choices
If we increase that pad area to be capable all over
Mars, the folding panel parallelogram
dimensions become 2.67 m b 2.67 m, for
about 43 sq.m bearing area. This is part
of the comparative pad area summary and comparison given in Figure 4. There is a trade-off here: the bigger these folding panels can be, the more of Mars (that is otherwise fairly smooth and level) is a feasible landing and takeoff site.
The moon is not a problem, nor is
much of dry land Earth (most anything requiring picking or blasting would be
adequate).
This would simply not be the case with those 1 m diameter
round tip-mounted landing pads that Spacex illustrates.
That total pad area is about 2.4 sq.m,
give or take a small amount. What
is needed for rough-field capability on Mars (or the Earth) apparently falls in
the 30-45 sq.m range. You simply
cannot do that, in any practical
way, with smallish fixed-geometry
tip-mounted landing pads. Those will require
thick reinforced-concrete landing fields,
or else thick solid rock.
I know they have their hands full at Spacex trying to make
this vehicle a reality. But some of the
thinking I have explored here, also needs
to go into Spacex’s designs!
Update 2-5-19:
As a follow-up, I put
some more-traceable masses for the BFS/”Starship” weight statements into a
spreadsheet, with gravity data, and empirical data for the safe bearing
capability of various Earthly surfaces.
This included the selections (and rationales) as for which surfaces
resemble the moon and Mars, and which
might be the widespread worst cases for emergency landings on Earth. Sources are indicated.
Figure A – Masses and Local Gravity for the Local-Weight Weight Statements
Masses and gravity are given in Figure A. The residual propellant remaining is nothing but a wild
guess, knowing that a dry-tanks landing
is truly risky. As it turns out, the presence or absence of residual propellant
mass at touchdown does not drive the sizing of landing pad area. Refilled launch weight drives this.
Figure b – Surface Bearing Capabilities on Earth, Annotated for Mars and the Moon click for larger image
The safe surface bearing-pressure capability data for a variety
of Earthly surfaces is given in Figure B.
These are civil engineering data from an old-vintage Marks’ Mechanical Engineer’s
Handbook. These surfaces are rather
variable in properties, as is typical of
geology. They represent safe bearing
pressure loads so that your structure or object does not try to sink slowly
into the surface, even over long periods
of time. It is conservative, ethical practice to use the min pressure
values for design. In the
handbook, the table presented both
metric and US customary values, for
which it was obvious the metric were converted from the US customary source
values.
To this table I have added the notations about which
surfaces resemble the bulk of the moon and Mars, and the rationales for those selections. I have also indicated the most common
soft-surface emergency landing surfaces for Earth, excluding soft sand beaches and deserts (and
swamps). The rationale for that is
simple experience. These are my best estimates, if I had to do this.
I worked out local-weight weight statements for Earth, Mars,
and the moon, for two
configurations. One is arrival, with the larger payload sent from Earth, and only residual propellant left at
touchdown. The other is at
departure, with full propellant
load, but a reduced payload, for the return to Earth. This reflects exactly what Spacex says the
scenarios are for Mars.
Spacex says there needs to be no lunar refilling for return
to the Earth from the moon, but this
analysis anticipates that eventually lunar refilling might be attempted, for trips from the moon to destinations other
than Earth. It does not matter; as it turns out, the lunar launch case does not determine the
design requirement for landing pad area.
But I had to check, as a due
diligence item.
What I found was that local-weight launch weights exceeded
local-weight touchdown weights by roughly a factor of 5. Therefore,
it is only local launch weights that govern max bearing pressure exerted
upon the local surfaces. One of these is
the worst case that drives the design requirements.
Surfaces on the moon, and the great majority of Mars, resemble soft fine sand. There are places on Mars with somewhat-stronger
surfaces, but these are definitely not
the majority of possible landing sites. You
do not want a rough-field landing design restricted to rare site opportunities. That would be rather pointless. As for the range of properties, you have to select the min capability.
Figure b – Local-Weight Weight Statements and Bearing Loads Size Landing Pad Area click for larger image
Figure C combines the local-weight weight statements with
the appropriate selected surface bearing capabilities, to produce min total landing pad areas for
Earth, Mars, and the moon.
Mars governs, and by a
significant margin. The total pad area result
obtained here is not at all far from the seat-of-the-pants 43 sq.m in the
original article just above. But this
updated result is more traceable, and
therefore the more reliable value. It is
just about 46.2 sq.m.
The same figure also gives a selection of parallelogram
dimensions for each fold-out landing pad panel.
This is a function of the number of landing-leg fins, the number of panels per fin, and the aspect ratio of those panels (the
height to base ratio for the parallelogram shape). Beyond scope here is the structural design of
such panels; it seems likely that the
lightest version would be nearer aspect ratio 1. That would be a panel 2.77 x 2.77 m
size, vs 2.67 x 2.67 in the original article. That’s pretty close!
Again, I must point
out that this is the sort of design, and
design analysis, that is needed by
Spacex to really provide a rough-field capability for its BFS/”Starship”
spacecraft on Mars (or anywhere else). The
round tip pads Spacex currently shows are roughly a meter diameter, for a total of about 2.4 sq.m total
area, roughly some factor 20 smaller
than what I determined here.
Implications
Without the large total landing pad area I found, the craft is restricted to very thick
reinforced concrete landing pads, or smooth, level stretches of thick, solid rock.
Otherwise, while you might
possibly land (and no guarantees about that!),
you’ll sink-in unevenly, and
tip-over “for sure”, upon refilling propellant
for launch.
At 2.4 sq.m and Mars launch weight, the applied bearing pressure is ~0.39
MPa, similar to the 0.38 MPa min capability
of Earthly coarse sand & gravel, and
similar to only a minority of Mars!
And even that still lacks the factor 2 margin you need for the dynamical
impact effects of the touchdown: the
fin tips will inevitably stab deeply into the surface, risking getting stuck like tent stakes. Very likely,
they will stab-in unevenly,
risking a tip-over, even if the
site is level. So the chances of
a successful landing with the depicted design are very poor, and there is no chance at all of a
successful refilled launch.
If the site actually resembles the soft sand that is the
bulk of Mars, there is no
chance at all of a successful landing,
and by far. The applied bearing
load is 0.39 MPa, even without the
factor 2 for the dynamics. The soft sand
capability is only 0.1 MPa. That’s about
factor 4 outside-of-the-ballpark, and
about factor 8 wrong with dynamics allowed-for!
That’s a crash, period. That’s exactly what will happen with
three 1-meter-diameter fixed-geometry fin-tip landing pads!
Conclusion
Something about the design Spacex currently shows, must change substantially, before even an unmanned cargo ship flies to
Mars. They need 47 sq.m of pad
area, not 2.4 sq.m. That’s what the best-available data actually says.
Galaxy Magazine, February 1951. Note guy wires stabilizing the spacecraft. Wires are attached to spacecraft's midsection instead of spacecraft's nose in order to minimize stresses.
Artwork by Jack Coggins (1952)
Artwork by Ron Miller.
Artwork by John Polgreen (1957). Plenty of landing legs. Note how the curved legs can fold flat to the spherical hull. Each leg folds in two along the central hinge until both segments snuggle like two spoons, then the doubled segments folds up to the hull until flush.
Artwork by Paul Rossi for Martin Marietta (1960) click for larger image
Recovering from a Topple
artwork by Ed Valigursky
While landed, for extra safety, keep the control moment gyroscope clutched and powered up. This will help keep the ship from toppling.
However, what if you do have a catastrophic failure and your rocket topples over? If you are at a civilized spaceport, as you float in the burn-recovery medical tank, you can console yourself with the thought that the port will probably have the equipment required to restore your ship to an upright position. Provided, of course, that the ship didn't break its spine and that you or your insurance can cover the cost.
If your ship is a deep space explorer on an uncharted planet, and you have no communication system with which to yell for help, then you have a problem.
He was right, the digging was recent and it was not yet finished, for only half of the soil had been cleared away from around the fins of the ship. The cruiser had been buried after it had been landed, partly to help conceal it, partly to keep it steady in a proper position for a take-off where there was no cradle to hold it. If a storm here had battered it off fin level, with no port cranes to right it, the ship would be useless scrap until it rusted away.
From THE BEAST MASTER by Andre Norton, 1956
CLUTCH THE GYROS 2
(ed note: Beowulf Shaeffer is in a flying car, while Bellamy is in a spacecraft called "Drunkard's Walk" with an unreasonably powerful engine. Bellamy is trying to kill Beowulf. Beowulf bashes his flying car into the side of Drunkard's Walk then crashes into the ground. Drunkard's Walk lands using a "gravity drag" {don't ask})
The car was on its nose in high fern grass. All the plastic windows had become flying shards, including the windshield; they littered the car. The windshield frame was crushed and bent. I hung from the crash web, unable to unfasten it with my crippled hands, unable to move even if I were free.
And I watched the Drunkard's Walk, its fusion drive off, floating down ahead of me on its gravity drag.
I didn't notice the anomaly then. I was dazed, and I saw what I expected to see: a spaceship landing. Bellamy? He didn't see it, either, but he would have if he'd looked to the side when he came down the landing ladder.
He came down the ladder with his eyes fixed on mine and Emil's sonic in his hand. He stepped out into the fern grass, walked over to the car, and peered in through the bent windshield frame.
I could walk, barely. I could keep walking because he kept prodding the small of my back with the gun.
We were halfway to the ship when I saw it. The anomaly. I said, "Bellamy, what's holding your ship up?" He prodded me. "Walk." "Your gyros. That's what's holding the ship up." He prodded me without answering. I walked. Any moment now he'd see ... "What the —" He'd seen it. He stared in pure amazement, and then he ran. I stuck out a foot to trip him, lost my balance, and fell on my face. Bellamy passed me without a glance. One of the landing legs wasn't down. I'd smashed it into the hull. He hadn't seen it on the indicators, so I must have smashed the sensors, too. The odd thing was that we'd both missed it, though it was the leg facing us. The Drunkard's Walk stood on two legs, wildly unbalanced, like a ballet dancer halfway through a leap. Only her gyros held her monstrous mass against gravity. Somewhere in her belly they must be spinning faster and faster ... I could hear the whine now, high-pitched, rising ... Bellamy reached the ladder and started up. He'd have to use the steering jets now, and quickly. With steering jets that size, the gyros — which served more or less the same purpose — must be small, little more than an afterthought.
Bellamy had almost reached the air lock when the ship screamed like a wounded god. The gyros had taken too much punishment. That metal scream must have been the death agony of the mountings. Bellamy stopped. He looked down, and the ground was too far. He looked up, and there was no time. Then he turned and looked at me. I read his mind then, though I'm no telepath. Bey! What'll I DO? I had no answer for him. The ship screamed, and I hit the dirt. Well, I didn't hit it; I allowed myself to collapse. I was on the way down when Bellamy looked at me, and in the next instant the Drunkard's Walk spun end for end, shrieking. The nose gouged a narrow furrow in the soil, but the landing legs came down hard, dug deep, and held. Bellamy sailed high over my head, and I lost him in the sky. The ship poised, braced against her landing legs, taking spin from her dying flywheels. Then she jumped. The landing legs acted like springs, hurling her somersaulting into the air. She landed and jumped again, screaming, tumbling, like a wounded jackrabbit trying to flee the hunter. I wanted to cry. I'd done it; I was guilty; no ship should be killed like this. Somewhere in her belly the gyroscope flywheels were coming to rest in a tangle of torn metal. The ship landed and rolled. Bouncing. Rolling. I watched as she receded, and finally the Drunkard's Walk came to rest, dead, far across the blue-green veldt. I stood up and started walking. I passed Bellamy on the way. If you'd like to imagine what he looked like, go right ahead. It was nearly dark when I reached the ship. What I saw was a ship on its side, with one landing leg up. It's hard to damage hullmetal, especially at the low subsonic speeds the Drunkard's Walk was making when she did all that jumping. I found the air lock and climbed in. The lifesystem was a scrambled mess. Parts of it, the most rugged parts, were almost intact, but thin partitions between sections showed ragged, gaping holes. The flywheel must have passed here. The bouncing flywheel hadn't reached the control cone. Things lighted up when I turned on the communications board. I had to manipulate switches with the heel of my hand. I turned on everything that looked like it had something to do with communications, rolled all the volume knobs to maximum between my palms, and let it go at that, making no attempt to aim a com laser, talk into anything, or tap out code. If anything was working on that board — and something was delivering power, even if the machinery to use it was damaged — then the base would get just the impression I wanted them to have. Someone was trying to communicate with broken equipment.
From GRENDEL by Larry Niven (1968)
Extra time will be required if the natives are shooting at you
WILDERNESS SHIP RAISING
So say you are on an uninhabited planet far from the benefits of civilization with no way to call for help. If the ship isn't too terribly huge, Isaac Kuo suggests that it might be possible to construct a sort of gigantic A-frame and raise the ship with cables. Isaac suggests attaching cables to the ship's nose and hoisting it vertical. The ship's landing jacks are repaired, if necessary, then the ship is lowered to stand on its own three feet.
Eric Tolle points out that care must be taken not to drag the ship's tail. He makes the brilliant suggestion that studying the engineering associated with Egyptian Obelisks would provide answers! In many ways it is the same problem.
Back in 1586 engineers lowered, moved, and erected the Vatican Obelisk(because it wasn't in the aesthetically perfect spot). The Obelisk is about 25 meters tall and weighs 330 tons. This isn't much smaller than the Polaris I worked out in the example. That was about 43 meters tall and massed 378 metric tons.
The Obelisk required about 140 horses and a year of work, but I'm sure things will go quicker with modern machinery and engineering (however, extra time will be required if the natives are shooting at you). The girders for the A-frame could be a standard feature with wilderness spacecraft, perhaps stored in the ship's core and extracted from the nose. Storing the girders as removable parts of the hull may make it easier to access, but they might be damaged in the initial topple.
Isaac says that avoiding tail dragging can be done by anchoring the tail with cables. But a better solution might be raising the ship by cables attached to the midpoint, instead of the nose. The ship is raised entirely free of the ground, then a cable attached to the tail is pulled to pivot the ship into proper nose-upward orientation. You might be able to get away with an A-frame only half the height of the ship.
There are substantial trade-offs, however, depending on which method you use. Midpoint lifting requires an A-frame to support the entire weight of the ship in whatever gravity you happen to be. Lifting the ship by the nose requires longer, but less sturdy members for the A-frame. Shorter, more sturdy members are more likely to survive the initial crash, but may very well mass more than the longer ones. Longer members may be "recycled" into shorter members if they are damaged. Shorter members may be replaced by native materials -- trees, stone blocks, etc -- provided such are of sufficient strength.
It all boils down to your ship design. How much emergency gear can you carry? Is it better to stock up on ship repair materials to maximize the chance of getting off that space-rock, or on survival equipment to stay alive until rescue comes? Which then brings us back to the question of how far out your ship is meant to go...
Garon Whited
If that fails, Eric suggest rolling the ship into a nearby lake or ocean and hoping that the ship floats with the nose uppermost. He notes that this will probably terminate the ship's warranty with extreme prejudice. One can hope that the heavy nuclear propulsion system will make the ship tail-heavy. However, Isaac points out that the huge propellant tank will tend to make the ship float sideways, with the propulsion system providing little or no tipping, much like the outboard motor on a speedboat.
SHIP RAISING 1
artwork by Don Maitz
The Far Traveler came to Botany Bay, to Paddington, dropping down to the Bradman Oval—which sports arena, since the landing of the Survey Service's Discovery, had become a spaceport of sorts. Discovery was gone, to an unknown destination, taking with her the mutineers and the friends that they had made on the newly discovered Lost Colony. The destroyer Vega, dispatched from Lindisfarne Base to apprehend the mutineers, was still in the Oval, still lying on her side, inoperative until such time as the salvage tugs should arrive to raise her to the perpendicular. Discovery, under the command of her rebellious first lieutenant, had toppled the other ship before making her escape.
"This is too much!" yelled The Far Traveler's captain. Grimes blinked, thinking at first that the other was referring to the matutinal snack. But this was unlikely, he realized. "Calm down, calm down," he soothed. "Take a pew. Have a cuppa. And a scone …" "Calm down, you say? How would you feel in my shoes? I was engaged as a yachtmaster, not a tugmaster. I should have been consulted. But she, as per bloody usual, has gone over my head!" "What is all this about?" demanded Grimes. "You mean that you don't know either, Captain?" "No. Sit down, have some tea and tell me all about it. Shirley—a mug for Captain Billinger, please."
"She," said Billinger after a tranquilizing sip, "is rolling in money—but that doesn't inhibit her from grabbing every chance to make more of the filthy stuff. She has signed a contract with your pal Delamere, engaging to raise Vega to liftoff position. She just happened to mention it to me, casual like." "You're not a tugmaster," agreed Grimes, "and a space-yacht is certainly not a tug. Looks to me as though she's bitten off more than she—or you—can chew." "Maybe not," said Billinger slowly, "maybe not She's a powerful little brute—The Far Traveler, I mean. She's engines in her that wouldn't be out of place in a battleship. But I should have been consulted." "So should I," said Grimes. "So should I. After all, this is my spaceport, such as it is." And then, more to himself than to the other, "But Frankie won't be too popular, signing away a large hunk of the taxpayers' money when the Survey Service's own tugs are well on the way to here." "They're not," said Billinger. "It seems that there's been some indefinite delay. Delamere got a Carlottigram about it Or so she says." "And so Frankie keeps his jets clear," murmured Grimes in a disappointed voice. "He would."
And just how would this affect him? he wondered. Vega lying helplessly on her side was one thing, Vega restored to the perpendicular, to the lift-off position, would be an altogether different and definitely dangerous kettle of fish. Even should her drives, inertial and reaction, require adjustments or repairs she would be able to deploy her quite considerable weaponry—her automatic cannon, missile launchers and lasers. The city of Paddington would lay at her mercy. And then?
"Good. No doubt you gentlemen feel that you are entitled to be apprised as to what has been arranged between Commander Delamere and myself. The commander will supply the towing wires from his stores. It will be necessary to pierce The Far Traveler's shell plating about the stern to secure the towing lugs. I am informed that the welding of steel onto gold is impracticable—and, of course, the modified gold that was used to build the ship on Electra is unobtainable here. Commander Delamere assures me, however, that his artificers will be able to make good the hull after the job has been completed. All dust and shavings will be carefully collected and melted down to plug the holes."
Grimes stood with Wheeldon on the close-cropped grass of the Oval—the groundsmen were still carrying out their duties although no one knew when, if ever, play would be resumed—a scant five meters from the recumbent hulk of Vega. She was no more than a huge, useless, metal tube, pointed at one end and with vanes at the other. It did not seem possible that she would ever fly, had ever flown. Like a giant submarine, improbably beached on grassland, she looked—a submarine devoid of conning tower and control surfaces. Grimes remembered a visit he had paid to one of the ship-building yards on Atlantia where he, with other Survey Service officers, had witnessed the launching of a big, underseas oil tanker. And this operation, of which he was in charge, was a launching of sorts …
Forward of the crippled destroyer stood The Far Traveler, a fragile seeming golden tower, a gleaming spire supported by the flying buttresses that were her stern vanes. Between each of these there was a steel towing lug, the dull gray of the base metal contrasting harshly with the rich, burnished yellow of the yacht's shell plating. Grimes had inspected these fittings and, reluctantly, had admitted that Delamere's artificers had made a good job. To each of the three lugs was shackled a length of wire rope, silvery metal cordage that, in spite of its apparent flimsiness, was certified to possess a safe working load measured in thousands of tons. It, like the Baroness's yacht, was a product of Electra, yet another example of arcane metallurgical arts and sciences. It was hellishly expensive—but when it came to the supply of stores and equipment to its ships the Survey Service had occasional spasms of profligacy. That wire must have been in Vega's storerooms for years. Nobody had dreamed that it would ever be used.
Lugs had been welded to the destroyer's skin just abaft the circular transparencies of the control-room viewports. To each of these a length of the superwire was shackled. All three towlines were still slack, of course, and would be so until The Far Traveler took the strain. Grimes didn't much care for the setup. The problem would be to maintain an equal stress on all parts. He would have liked to have installed self-tensioning winches in either the yacht or the warship but, although such devices were in common use by Botany Bay's shipping, none were available capable of coping with the enormous strains that would be inevitable in an operation of this kind. As it was, he must do his damnedest to ensure that at least two of the wires were taking the weight at all times, and that there were no kinks. He could visualize all too clearly what would happen if there were—a broken end whipping through the air with all the viciousness of a striking snake, decapitating or bloodily bisecting anybody unlucky enough to be in the way. And he, Grimes, was liable to be one such. He had to direct things from a position where he could see at once if anything was going wrong. Delamere and the Baroness and all Vega's crew, with the exception of one engineer officer, were watching from the safety of the stands. And Mavis, with her entourage, was also getting a grandstand view …
artwork by Karel Thole
He actuated his transceiver. "Port Captain to Far Traveler. Stand by."
"Standing by," came Billinger's voice in the headset. "Port Captain to Vega. Stand by." "Standing by," replied the engineer in the destroyer's inertial drive room. Ships, thought Grimes, should be fitted with inertial drive units developing sufficient lateral thrust to cope with this sort of situation. But I'll use whatever thrust Frankie's engineer can give me … "Port Captain to Far Traveler. Lift off!" The yacht's inertial drive started up, cacophonous in the still air—. She lifted slowly. The wire cables started to come clear of the grass. "Hold her at that, Billinger. Hold her … Now … Cant her, cant her … Just five degrees short of the critical angle …"
The Far Traveler was not only a floating tower, hanging twenty meters clear of the ground, but was becoming a leaning tower, toppling slowly and deliberately until her long axis was at an angle of forty degrees from the vertical. Billinger should have no trouble holding her in that position. In a normal vessel anxious officers and petty officers would be sweating over their controls; in the fully-automated yacht servo-mechanisms would be doing all the work. "Port Captain to Vega … Maximum lateral thrust, directed down!" The destroyer came to life, snarling, protesting. The combined racket from the two ships was deafening. "Lift her, Billinger. Lift her! Maintain your angle …" The Far Traveler lifted. The cables—two of them— tautened. They … thrummed, an ominous note audible even above the hammering of the inertial drive units. But the sharp stem of Vega was coming clear of the grass, a patch of dead, crushed, dirty yellow showing in sharp contrast to the living green.
"Thirty-five degrees, Billinger …" The change in the yacht's attitude was almost imperceptible but the threatening song of the bar-taut wires was louder. "Increase your thrust if you can, Vega!" "It'll bugger my innie if I do …" "It's not my innie," growled Grimes. "Increase your thrust!" More dead yellow was showing under the warship.
"Billinger—thirty degrees … Twenty-five … And roll her … Roll her to port … Just a touch … Hold it!" For a moment it seemed that all the weight would be on one cable only but now two had the strain once more. "Billinger! Twenty degrees …" Vega was lifting nicely, coming up from the long depression that she had made with her inert tonnage. Grimes noticed worm-like things squirming among the dead grass stems—but this was no time for the study of natural history. He was trying to estimate the angle made by the destroyer's long axis with the ground. Soon he would be able to tell the engineer to apply a component of fore-and-aft thrust. "Billinger, ten degrees …"
Then it happened. One of the taut wires snapped, about halfway along its length. The broken ends whipped viciously—the upper one harmlessly but the lower one slashing down to the grass close to where Grimes was standing. It missed him. He hardly noticed it. "Billinger, roll to starboard! Roll!" He had to get the weight back on to two wires instead of only one. "Hold her! And lift! Lift!" Would the cables hold? "Vega! Fore and aft thrust! Now!" The destroyer, her sharp bows pointing upward and rising all the time, surged ahead. Two of her stern vanes gouged long, ugly furrows in the grass. There should have been a spaceman officer in her control room to take charge of her during these final stages of the operation—but Delamere, when Grimes had raised this point, had insisted that it would not be necessary. (The obvious man for the job, of course, would have been Vega's captain—and Frankie, as Grimes well knew, was always inclined to regard the safety of his own skin as of paramount importance.) Vega lifted, lifted, coming closer and closer to the vertical. Two of her vanes were in contact with the ground, the third was almost so. Grimes looked up to the taut cables. He could see bright strands of broken wire protruding from one of them. It would be a matter of seconds only before it parted, as had the first one. Obviously those safe working load certificates had been dangerously misleading … "Vega! Full lateral thrust! Now!"
"The innie's flat out!" Damn all engineers! thought Grimes. At crucial moments their precious machinery was always of greater importance to them than the ship. "Double maximum thrust—or you've had it!" The officer must have realized at last that this was an emergency. The destroyer's inertial drive not only hammered but … howled. The ship shuddered and teetered and then, suddenly, lifted her forward end, so rapidly that for an instant the cables hung slack. But Billinger quickly took the weight again and gave one last, mighty jerk. The stranded cable parted but the remaining towline held. The broken end slashed down to the grass on the other side of the destroyer from Grimes. Vega came to the perpendicular and stood there, rocking slightly on her vanes. "Billinger—'vast towing! Vega—cut inertial drivel" "It's cut itself …" said Vega's engineer smugly.
And then, only then, was Grimes able to look down to see what the end of the first snapped cable had done. He stared, and swallowed, and vomited. He stood there, retching uncontrollably, befouling his clothing. But it didn't much matter. His footwear and lower legs were already spattered with blood and tatters of human flesh. The flying wire had cut the unfortunate Wheeldon—not very neatly—in two.
The various incarnations of Star Trek have contained more scientifically and logically ridiculous concepts, but putting landing gear on a 700,000 metric ton starship not designed for landing is certainly in the top ten. Image from Memory Alpha
The "uneven landing site" problem is so daunting that it is tempting for a science fiction author to invent incredibly high tech solutions that are unobtainium at best and technobabble at worse. Much like David Drake did in his classic series of novels about Hammer's Slammers. Mr. Drake noted the many problems of using caterpillar tracks for armored fighting vehicles. His solution was to make the tanks into hovercraft, using ducted fans so that they could float over irregular ground. All you need to make it work is to equip each tank with a fusion power source capable of supplying the electricity needs of California. Mr. Drake did analyze and accommodate the logical consequences of the tanks possessing so much electrical generation capacity, so this is a case of an author doing the job right.
I will note in passing the jaw-dropping stupidity of the landing legs on the starship Voyager. Not only would they not work, Star Trek starships as a general rule never have a need to land anyway. Shuttlecraft and transporters are a much more efficient solution. The Voyager is not designed to land, it probably cannot support its own structure without technobabble force fields reinforcing the internal girders, the same goes for the ludicrously tiny landing gear, seven hundred thousand metric tons concentrated on those tiny foot pads will poke holes in solid bedrock, once landed the Voyager is suddenly vulnerable to all ground-based hazards, the list goes on and on. About the only reason for landing is to make flashy eye-candy images for the audience in a desperate attempt to prop up the TV ratings.
RICK STERNBACH RESPONDS
(ed note: Rick Sternbach dropped me an email with some commentary. Which reminds me that more people read this website than I realize so I would do well by being more polite.)
Yeah, a lot of folks assumed Voyager was sitting all 700,000 MT on a planetary surface, and yeah, they looked a bit small and silly, but there were amazingly few places in which to stow the legs within the engineering hull and have them look like they’d work.
I did want to give you a little info on the true nature of the legs, if it’ll help. Yes, the ship is using it’s structural integrity field (SIF) generators to reinforce the framing and plating. The ship is also using its impulse propulsion system (IPS) to support most of the mass, and the legs and feet are really what we called the ground hover footpad system (GHFS), mostly to keep the vessel from sliding about while on a planet.
Normally, the impulse engines can move a Starfleet ship at multiples of 1g, so countering the gravity of an Earthlike world is a walk in the park. Of course, in Star Trek, we don’t feel the acceleration because of the inertial dampers. Or magic.
I won’t argue the wisdom of actually landing a starship, since that was really a producer thing, but based on all the other Trekish engineering I’ve played with for the franchise, I can accept using the legs more as simple stabilizers. If the impulse space-time driver coils flake out, well, then we’ve got a problem.
In the SF comedy movie Galaxina, the good ship Infinity avoids the uneven landing site problem with technobabble adjustable length "repulsor-beam/force field" legs. The disadvantage is that the legs vanish when the power goes out.
I tried the same thing in my illustration of the galactic cruiser Leif Ericson.
The standard science fiction gag is to support the spacecraft on the ground using technobabble "force fields" or "pressor/repulsor beams". These are fields or beams of as-yet undiscovered energy that are perfectly adjustable, capable of allowing for any ground level irregularities. They are also also somehow much stronger than steel girders or anything else composed of matter. Their main drawback is that they consume energy, and steel girders do not vanish if the energy becomes exhausted.
However, from the standpoint of basic physics it would imply that any hapless person who walked through one of the beams would be flattened into a thin layer of bloody goo under a crushing force of N where N is equal to the weight of the spacecraft divided by the number of landing leg beams.
But he had not eyes for it. To the west where avenue and buildings ended was the field and on it space ships, stretching away for miles — fast little military darts, stubby Moon shuttles, winged ships that served the satellite stations, robot freighters, graceless and powerful. But directly in front of the gate hardly half a mile away was a great ship that he knew at once, the starship Asgard. He knew her history, Uncle Chet had served in her. A hundred years earlier she had been built out in space as a space-to-space rocket ship; she was then the Prince of Wales. Years passed, her tubes were ripped out and a mass-conversion torch was kindled in her; she became the Einstein. More years passed, for nearly twenty she swung empty around Luna, a lifeless, outmoded hulk. Now in place of the torch she had Horst-Conrad impellers that clutched at the fabric of space itself; thanks to them she was now able to touch Mother Terra. To commemorate her rebirth she had been dubbed Asgard, heavenly home of the gods.
Her massive, pear-shaped body was poised on its smaller end, steadied by an invisible scaffolding of thrust beams. Max knew where they must be, for there was a ring of barricades spotted around her to keep the careless from wandering into the deadly loci.
From STARMAN JONES by Robert A. Heinlein (1953)
In Isaac Asimov's The Currents Of Space, the ships are equipped with an unobtainium "diamagnetic field", which allows the ships to float out to the launch pad. Diamagnetism is when a substance is repelled by both poles of a magnet, but it is unclear if such levitation is possible by the laws of physics.
The ship rolled out of the hangar like an air-borne whale, moving slowly, its diamagnetized hull clearing the smooth-packed clay of the field by three inches.
Terens watched Genro handling the controls with finger-tip precision. The ship was a live thing under his touch. The small replica of the field that was upon the visiplate shifted and changed with each tiny motion of every contact.
The ship came to a halt, pinpointed at the lip of a take-off pit. The diamagnetic field strengthened progressively towards the ship's prow and it began tipping upward. Terens was mercifully unaware of this as the pilot room turned on its universal gimbals to meet the shifting gravity. Majestically, the ship's rear flanges fitted into the appropriate grooves of the pit. It stood upright, pointing to the sky.
The duralite cover of the take-off pit slipped into its recess, revealing the neutralized lining, a hundred yards deep, that received the first energy thrusts of the hyperatomic motors.
From THE CURRENTS OF SPACE by Isaac Asimov
Landing Beacons
You can make the pilot's job fractionally easier with ground-based assistance, like perfectly flat landing pads and landing beacons.
At a minimum, a landing beacon emits a radio signal that allows the pilot to home in on the landing site, and makes the implicit promise that the landing site is more-or-less flat and not full of bolder/quicksand/pools of bubbling lava/ or other landing hazards. Beacons on boondocks pioneer planets do not provide any more than this, the pilot has to be responsible for avoiding midair collisions with other spacecraft. Beacons at actual starports provide the pilot with all sorts of telemetry (approach rates, wind velocity and direction, local weather conditions, etc). If the starport is handling more than one landing per day, it probably also has a full blown space traffic controller that will assign you approach lanes and scream at you if you stray outside. Massive spaceports at highly developed colonies might not let you land at all, instead you have to dock your ship at the orbital highport and rent a registered and bonded local interface shuttle to transport your crew and cargo to the surface.
If you are trying to land somewhere real primitive (like to rescue some castaways on an otherwise uninhabited planet), you might have to be satisfied with landing beacons in the form of wood bonfires, maybe a few signal flares if you are real lucky.
First-in scouts landing on unexplored planets have no beacons. They must do extensive scans from orbit, try to pick a safe landing site, and take her down by the seat of their pants. This is why NASA and other space agencies spend months on choosing safe landing sites.
And even then Neil Armstrong got a rude surprise when the "perfectly smooth" landing site the Lunar Module was heading for turned out to be full of bolders the size of trucks. The bolders were below the resolution of the Lunar Orbiters that did the mapping. Neil had to go to manual control to avoid crashing.
(ed note: Mercenaries from evil global corporations are trying to capture the nation of the United Mitanni Commonwealth. Protagonist Sandy Balwin aka Sendi Bold One is leading the liberation effort. His main job is the liberation of the country's Vamori-Free Space port)
As CIC and Spaclmpy commander, my missions were the recapture of Vamori-Free followed by the Topawa assault. I planned to move fast and alter plans in the face of new situations. That's the classic formula for winning a battle or a war. Like General Nathan Bedford Forrest, I wanted to git thar fustest with the mostest men. Holding and defending a space port had never been done before, and the Freedom Army consisted of land warriors whose only experience with vertical envelopment had been with armored aerodynes. They planned to defend Vamori-Free on the ground and moved in a few shoulder-launched SAMs to defend against low-level tacair. They didn't know how anyone could attack and invade a space port from space. I did. A space port is mostly space. Vamori-Free Space Port covered more than 7,500 square kilometers and stretched more than 150 kilometers along seacoast. It was larger than some nations. During normal operations, 25,000 people lived and worked there. We mounted a two-pronged effort against the Vamori-Topa objectives. Pahtu's river offensive would pin down Free Army forces at Topawa. Moti's Northern Impy would to hit the western edge of Vamori-Free by following the power transmission lines from Oidak. Then my space contingent would strike Vamori-Free and land. It sounds easier than it was. The tacair strikes were to be followed by a second pass of Omer's skalavans to cover the landing of Ursila's packets and free trader ships manned by as many swat teams as we could put together from Citlmpy people in space. Some had to be flown by a single pilot because we were short of pilots. There was no ground power for landing aids at Vamori-Free (because the invaders have cut the power) and shipborne radars don't have the precision necessary for landing, so Omer had the crucial task of dropping a landing beacon on his second pass. We were over Vamori-Free's western horizon now, but I couldn't pick up Omer's implanted landing beacon. "Slugger Leader, this is Bold One. Do you receive signals from Prong Alpha?" Ursila's voice came back, "Bold One, this is Slugger Leader. Negative on Prong Alpha. Something's gone wrong, Sendi!" "Boomer Leader, this is Bold One coming out of blackout with Slugger. We are negative on Prong Alpha. Repeat, negative on Prong Alpha. Any problem?" "Uh, Bold One, this is Stomper Leader. Purple Stomper was too high, and Boomer Leader made his second pass low to deploy Prong Alpha. They had a mid-air." Ohmygawd! Omer! Omer! The Mad Russian Space Jockey had let it all hang out … and some damned fool was where he shouldn't have been and cut it off. At a closure rate of Mach fifteen, neither had seen each other. The aerodyne may have been on Omer's screen, but he probably didn't have time to look at it. It was my fault for mixing Mach zero aerodynes with Mach fifteen space ships! There was no time to grieve then. We were less than five minutes from landing with no landing beacon to steer us in. If I didn't do something instantly, there would be a lot of pranged space ships. "Slugger Leader, this is Bold One. Did you monitor that?" "Affirmative! Sendi, I'll get down using calibrated eyeballs, but some of my pilots can't do it without help," Ursila reported. "Get a beacon down there. Any beacon!" "Stomper Leader, this is Bold One. Can you put your aerodyne in Area Twenty-four with its beacon squawking four-zeroes?" "I'll draw fire if I do!" "If you don't, you'll have real fire all around you from burning space ships! Or we'll overfly and leave you up the crick. Take your choice. We need your beacon in four minutes." "I can't risk my …" "Stomper Leader, this is Citlmpy Prime One." It was Kivalina who cut in. "Comply with Bold One's request now! Everyone's risking everything here. Topawa or the Dilkons!" That was The General's last call to his warriors before the First Battle of Oidak. The reaction and reply were immediate: "Topawa or the Dilkons! Stomper Leader is cushioning in Area Twenty-four now, beacon squawking four zeroes. But please don't land on me!" "Don't worry. And thank you," I told him. "Sluggers all from Bold One, critical instructions. Tape for replay. No time to repeat. Landing beacon is squawking four zeroes at Area Two-four. Repeat: Area Two-four. Have your computer offset for your specific landing coordinates. No need to acknowledge. Comply and execute … or you'll have a damned rough landing unless you put it in the ocean which isn't much softer."
WHAT PROCESS DID NASA USE TO PICK MOON LANDING SPOTS?
There was actually quite a long process used to do landing site selection. The original batch of Apollo landing sites (I'm referring to the ones that appear on lunar maps before Apollo 11) had to meet, as closely as possible four criteria:
First, the site had to be 'clear' of major obstacles to the degree that could be discerned from overhead photography. In particular, each site (there were 7 of them) had to have an ellipse that was something like 4 or 5 miles long East-West, and something like 1 or 2 miles North-South (those numbers are to the best of my recollection) that was free of major terrain problems. However, we should keep in mind that at the time of the first landing mission, the limit of photographic resolution that we had of those sites was of stuff that was about 30 feet (9 meters) across. So, there could well have been obstacles for the crew to contend with that were too small to show up in the pictures we had at the time.
Second, each site had to be within approximately 10 degrees north or south of the lunar equator. The idea here was that for the early missions it was desired to use something called a 'free return trajectory' enroute to the moon. This trajectory was desired because it is such that, in the event of a complete failure of the Apollo Service Propulsion System engine (the SPS engine) the spacecraft could go around the moon and return to a satisfactory re-entry condition at the earth (now, in fact, the accuracy required for this was much too great to achieve after translunar injection, so mid-course corrections would have been required on the way back, but they would be quite small — well within the capability of the RCS to perform). The free return trajectory requires that the inclination of the approach relative to the moon not exceed about 10 degrees, so this sets the maximum inclination of the lunar orbit at about 10 degrees if the spacecraft does no plane change during the Lunar Orbit Insertion maneuver.
Third, the sites needed to be spaced across the face of the moon such that a maximum number of launch opportunities from the earth could be had in case of launch scrubs. This was a part of the constraint on lighting from the sun at each landing site when a landing was being performed. To give the crew best visibility, it was desired that the sun be something like 5 degrees to 20 degrees above the lunar horizon at the time of landing, and (of course) at the crew's back. In other words, just past sunrise at the landing site. The approach trajectory during landing had a somewhat steeper flight path angle than this, which meant that the LM came down 'over top of' the sun for best visibility. Actually, the angle limits changed during the mission planning phases, but there was always a 'window' of from 13 to about 15 degrees that was considered 'allowable' for the sun's position. Now, the moon rotates on its axis every 28 days or so. This means that the sun moves over the moon's surface at something like 13 degrees per day. If we have only a 13 degree (or so) allowable range of position of the sun at landing, it means that a particular landing site is available only 1 day per month. For example, if we want to land at Apollo landing site #2, and we set a launch date, and we scrub the launch for some reason, we are out of luck at Site #2 if we want to stay within our sun position constraint. So, it has to be 'on to another landing site'. If we can wait for the next month, we can try landing site #2 again. If we don't want to wait, we have to have another site that is at least 13 degrees west of landing site #2 (if we have to scrub for 2 days, we have to have a site that is at least 26 degrees west of landing site #2).
One last constraint — early on, it was decided that we knew (to the required precision) the absolute position on the moon of features that were within 45 degrees of the North-South centerline — in other words a band of 45 degrees east to 45 degrees west of the North-South centerline. Outside of this boundary, the people responsible for this decided that the 'error bars' on positions of landmarks were too large, so they decided to pick sites within the plus or minus 45 degree longitude constraint.
The above resulted in 7 original sites spread across the face of the moon, all within 10 degrees of the equator, and all within about 45 degrees east to 45 degrees west.
(ed note: The arrogant Styor aliens have destroyed the the Terran trade post on Klor, by hovering over it with a spacecraft and torching the place with the rocket exhaust. Our Hero Kade is rooting around in the ruins of the base, looking for the interstellar communicator. What he finds is a landing beacon. Placing it on level ground will allow a spacecraft to safely land. The oppressed primitive Ikkinni natives call it a "star drum".)
But what Kade wanted was still there; the com. He splashed to that shelf. However as he reached for the starting button he saw another object, poised directly before the communicator. And he had been briefed in the proper use of that sectional rod mounted on a firm base.
Now he knew that the men who had waited in that room, or some member of the ship's crew, had suspected—or hoped—for his escape. There would be no answer to any message sent from the com. Perhaps the installation itself had been booby-trapped to prevent examination by native or Styor—but he did not need it.
Kade caught up that tube. Sealed into it were delicate works, the technology of which was beyond him. But it would work when and if he desired. Cradling it against him, the Terran made his way back along the waterlogged passage. He had only to locate a proper site, set up what he carried, and there would be a new landing field on Klor, one not supervised by the Styor. A full week of the longer Klorian days passed before their small party caught up with an Ikkinni war party. Kakgil called a conference of scouts who knew the land while Kade set up his signal tube in demonstration, explained the terrain needed and why. Hunters compared notes, grew heated in dispute, finally agreed and voiced their suggestions through Iskug, who had joined the band.
"Two suns, two sleeps away, there is a place where long ago the Spearman struck deep into the earth." He rounded his hands into a cup. "It has seen the ships from the stars. If it who drives such a ship is skillful, the ship could be set into this place as so." He inserted a finger tip into the curled fingers of his other hand.
"This is the only place?" Iskug's description was too graphic to be reassuring. The Ikkinni agreed that the described crater was the best and safest landing the range had to offer.
Later Kade, standing at the end of a grueling climb and looking down into that hole, was not sure. There was floor space enough, yes, to set a scout down. And the surface appeared as level as any ground. But the fitting of the ship into the hollow required skill such as only a veteran pilot would possess. However Trade pilots were top men.
They made their way to the floor of the crater. The eruption which had caused the blowout must have been a cataclysmic one. Kade held the signal at shoulder level, triggered a thumb button, and slowly turned, giving the hidden lens the complete picture of this rock-walled well for broadcasting. Then he walked to what he judged was the center of the open space and secured the tube on the ground with latching earth spikes. Last of all he brought his hand down sharply on the pointed tip of the cone. There was no way for him to know whether the broadcaster was really working; his answer could only come, in time, from off-world. Kade followed the line of Dokital's pointing spear tip. The newcomer was no Ikkinni, collared or free, nor the Overman of a squad. Away from a carrying-chair, the other marks of his Klorian godship, a Styor was climbing stiffly up the rugged slope. He held one arm bent at chest level and divided his attention between his footing and a band about his wrist. In his other hand he carried the ultimate in the aliens' armament—the needler!
Flight was cut off. The Terran judged that the wristband was some kind of tracking device, perhaps centered on his own thought waves. He could walk backward, step out into the space of the crater, and crash down to end near the signal. Only then the Styor might use that signal for bait.
On the other hand, suppose he was needled down. Would the alien pass the signal unnoticed? The Styor was astute enough to investigate why the off-worlder had camped here. Either way the bejeweled, slim humanoid had all the cards on his side. Kade had overestimated the sloth of the pampered lords, underestimated their desire to make sure of the last Terran.
About the Styor's middle was an anti-person belt. No overlord would risk his precious skin with the slightest chance of a counterattack. The spear in Kade's hold, any Ikkinni net, a rock thrown by a desperate man, would rebound from the aura now about the alien as from a dura-steel wall.
Unless—Kade searched the ground about him for some suggestion of offence or defense. The Styor could probably track them if they tried to run for it. He did not know the range of the instrument the alien wore. On the other hand he was not going to be needled down without some counterattack, no matter how feeble.
More to gain time than by any plan the Terran signalled Dokital away from the hut, along the edge of the crater. The rough terrain hid them from actual sighting by the Styor, though his locator would bring him on their track.
Single file the two walked a narrow line along the drop. An idea grew in Kade's mind. A chance he was now desperate enough to try.
The Styor reached the hut, did not even glance into its empty interior, but came on, treading the same way the fugitives had taken. Again Kade signed to Dokital, sending the Ikkinni away from him. Then the Terran halted, balancing his spear in his hand. A few feet beyond, the ancient bowl of the crater was split with a crack wide enough to offer protection to a slender Terran body. He marked that down.
He was waiting as the Styor's head arose, the alien's eyes raised from the device on his wrist to the man before him. Then Kade hurled his spear.
The aim was true, though the point struck that invisible guard a good six inches away from the Styor's chest. And the involuntary reaction of the other carried through even as Kade had hoped. A flinch backward set the alien's booted heel on a patch of smooth stone. There was a wide flail of arms as the Styor went backward into thin air.
His safety belt would save his life, but now he would have the inner wall of the crater to climb. The Terran's attack had bought them a measure of time. Kade sped to the crevice, Dokital joining him. The Styor was floating down, settling to the floor of the crater. But they had only gained a few moments of time, no real escape. Only—
Kade's arm went about Dokital, he carried the native with him in a rush as from overhead came a clap of sound louder than any thunder. Stone scraped skin raw as they tumbled into the rock crack. Above there was a flare of blinding light, and Kade hid his eyes with one bruised arm. The roar of a ship's tail flames as it braked into the heart of the crater was deafening.
Perhaps the Styor had had one instant of horror, a second's realization of descending death—then nothing at all. The same end he or his fellows had visited on the Trade post had already been his.
As the Terran and the Ikkinni crawled from their refuge the fumes of molten sand arose from that cup. Set neatly in the center was the star-ship. Kade climbed to the rim of the rock wall, waved at that expanse of pitted metal although no hatch had yet opened. But the response came soon enough, a ramp swung out to ground against the mountain some feet below him. He slid down, hearing his boots clang against its surface, hardly yet able to believe in that opportune arrival.
Right that moment I was feeling unusually expendable, almost expended, because I was hearing the sweetest sound in the universe, the beacon the retrieval boat would land on, sounding our recall. The beacon is a robot rocket, fired ahead of the retrieval boat, just a spike that buries itself in the ground and starts broadcasting that welcome, welcome music. The retrieval boat homes in on it automatically three minutes later and you had better be on hand, because the bus can't wait and there won't be another one along.
We heard the beacon cut off as the retrieval boat landed on it—I saw it land … and it was too far away. We heard the acting platoon sergeant call out: "In succession, prepare to embark!"
And Jelly called out, "Belay that order!"
We broke at last into the open and saw the boat standing on its tail, heard the ululation of its take-off warning—saw the platoon still on the ground around it, in interdiction circle, crouching behind the shield they had formed.
Heard Jelly shout, "In succession, man the boat—move!"
And we were still too far away! I could see them peel off from the first squad, swarm into the boat as the interdiction circle tightened.
And a single figure broke out of the circle, came toward us at a speed possible only to a command suit.
Jelly caught us while we were in the air, grabbed Flores by his Y-rack and helped Three jumps got us to the boat. Everybody else was inside but the door was still open. We got him in and closed it while the boat pilot screamed that we had made her miss rendezvous and now we had all bought it! Jelly paid no attention to her; we laid Flores down and lay down beside him. As the blast hit us Jelly was saying to himself, "All present, Lieutenant. Three men hurt—but all present!"
I'll say this for Captain Deladrier: they don't make any better pilots. A rendezvous, boat to ship in orbit, is precisely calculated. I don't know how, but it is, and you don't change it. You can't.
Only she did. She saw in her scope that the boat had failed to blast on time; she braked back, picked up speed again—and matched and took us in, just by eye and touch, no time to compute it.
If the piece of wilderness planetary surface that you are attempting to land on is composed of sand, fine soil, regolith, or similar material and your landing rocket thrust is really huge you may have a big problem. The rocket exhaust might create an instant crater. If it is large enough, it could undermine one or more spots reserved for the spacecraft's landing legs resulting in the ship toppling over. If you are really out of luck, it will be big enough to swallow the spacecraft entirely.
This is one of the reasons why first-in scouts have such generous salaries. And why it is impossible for them to buy life-insurance.
In addition, lunar regolith is noted for being hideously abrasive (think: microscopic razor blades) and will contain larger rocks. Any of this propelled upwards by the exhaust plume can damage the landing spacecraft. It also can sand-blast and perforate equipment already on the ground that has been stored too near the landing site.
If the plan is to set up a planetary base or something, they would be well-advised to have the first-in scouts look for a nice nearby piece of flat planetary bedrock, resistant enough to widthstand multiple landings and blast-offs. Or supply them with quick-setting concrete or something else suitable to make a landing pad. This is called "avoiding Surface/Plume interaction".
Later if a permanent spaceport is desired on the planet or moon, a major construction effort will be made to create a permanent landing field, with blast deflectors and everything.
A lunar-optimized SpaceX "Starship" busy avoiding surface/plume interaction NovaSilisko says this makes sense, so the main engines don't dig a 5 meter deep crater and/or send rocks up its own butt at 5 km/sec
Note how the tail engines are still hot. Scott Manley notes one of the red engines is a "vacuum" engine while the other is a "sea-level" engine. He figures the vacuum engine will be used for most of the descent since it points through the ship's center of gravity. The sea-level engine is gimbaled, so it is used for the "hover-slam" maneuver. The "tractor" engines at the top are used at the last minute for the actual touch-down, to avoid digging a crater
Location of the "tractor" engines
MITIGATING LANDER PLUME EFFECTS
Lunar lander engine exhaust blows
soil, rocks, and dust at high velocity and will damage
surrounding hardware such as lunar outposts, mining
operations, or historic sites unless the ejecta are
properly mitigated.
Twenty years of research have developed
a consistent picture of the physics of rocket
exhaust blowing lunar soil, but significant gaps exist.
No currently-available modeling method can fully
predict the effects.
Understanding and Modeling the Physics: Our
prior work characterized the different regimes of
transport that can occur under various plume and
planetary environment conditions. While rocket
exhaust can deeply crater Martian regolith, the lunar
effects are largely restricted to surface scouring a few
centimeters of looser material. Lunar regolith is highly
compacted deeper than a few centimeters and the
lack of an atmosphere to collimate the plume prevents
abrupt pressure gradients from the surface that would
otherwise cause the soil to deform into a crater. However,
a possible exception may occur in the permanently
shadowed regions where soil may be looser (as
suggested by several lines of evidence) or with a larger
lander on a soft crater rim.
We quantified
several types of damage to neighboring hardware via
analysis of the Surveyor III spacecraft that was sandblasted
by the Apollo 12 landing and by performing
hypervelocity impacts of appropriate particle sizes
and velocities onto additional materials.
Mitigating via ISRU: Our results show plume
ejecta are impossible to simply block with a berm or
fence because particles colliding in flight scatter over
the barrier. Also, larger particles like rocks loft over
the barrier and arc down into the other side, and the
berms themselves scatter the particles in lunar vacuum.
Berms can reduce ejecta damage, but full mitigation
requires construction of a landing pad. Center for Lunar and Asteroid
Surface Science (CLASS)
team members have prototyped and studied technologies
including sintering lunar regolith with microwaves,
sunlight, and/or infrared radiation, application
of polymers to regolith, the use of gravel and pavers,
lunar concrete, and more. They have tested robotics
for grading and compacting lunar landing zones. Our
team members also tested 3D printing of regolith that
can construct walls, and non-ISRU solutions such as
deployment of inflatable blast barriers. Each method
has drawbacks, so downselection to a set of complementary
technologies is required.
Next Steps: We are pursuing three approaches to
fully address the plume challenges. First, we are continuing
research into the physics to close the gaps,
leading to more predictive computer models. These
will set better requirements for landing operations and
landing pad construction. Second, we are testing and
assessing each mitigation technology including sintering
lunar regolith and other methods to create competent
surfaces, robotics for bulldozing and bermbuilding,
and the use of gravel or pavers. This will
lead to a recommended downselection. Third, we are
organizing a series of robotics competitions for landing
pad construction technologies in conjunction with
Machine Learning companies to further advance the
necessary robotic capabilities.
Crater formation for ~40 MT landers will be qualitatively worse than Apollo
Analysis of Surveyor, Apollo, and Chang’e data plus
terrestrial experiments and computer modeling
determined the following:
Different regimes of gas/granular behavior exist (like different
behaviors of frozen water vs. liquid water vs. vapor).
(Non)Occurrence of each regime depends on size of the lander +
environmental conditions (atmosphere, soil permeability, etc.).
Martian and the Lunar plume effects are not comparable.
Apollo LM effects were dominated by Viscous Erosion regime
(smooth & streaking stages) with rare occurrences of Bearing
Capacity Failure (in terrain modification stage).
A crater is not directly observable but is
detectable by presence of
erosive crestline failure between lunar
sedimentary strata (micro-scarps) (A);
headed (B) & unheaded (C) erosion
remnants
New image analysis
technique (Lane & Metzger,
2014) determined erosion
scales as plume shear stress
to the 2.5 power.
Therefore, it scales as
vehicle mass to the 2.5
power.
All data agree that about
2.5 tons of soil were
ejected by each LM landing
Chang’e 4 (~0.8 t) ejecta measured at 19 kg, confirming the 2.5
power index
For CLPS landers, there will be blowing dust and some rolling gravel
but no other significant effects
CLPS erosive depression predicted 0.25 cm deep, too tiny for
microscarps. Probably impossible to measure anything in imagery.
CLPS crater impossible to identify in computer simulations:
6 degree sun angle. Left: simulated lunar terrain; center: Chang'e 4 erosion on a smooth surface. Right: both added together
Applying the 2.5 power index to a 40 t lander predicts
~470 t ejected soil, forming a crater many meters deep
However, we cannot extrapolate this far.
It is likely that additional regimes will “turn on” at these high thrust levels.
Bearing capacity failure? Diffusion-driven shearing? Bulk failure?
Ejecta Characteristics
For the LM,
some ejecta
exceeded lunar
escape velocity
(2.43 km/s)
Particle Size
Ejecta Speed for LM
Dust
1000 – 3000 m/s
Sand
100 – 1000 m/s
Gravel
~30 m/s
Cobbles
~10 m/s
Ejecta were
dispersed
globally though
flux was small a
great distances.
Can destroy
orbiting
spacecraft.
For CLPS landers,
ejecta travel
multiple
kilometers (up to
10s or 100s).
For 40 t landers,
ejecta particle
velocities are
nearly double
the LM’s, so will
travel much
farther and
disperse globally
with vastly larger
impact flux
click for larger image
Analysis of
impact damage
on returned
Surveyor 3
hardware shows
extensive
surface cracking,
pitting, and dust
impregnation.
SEM images of Surveyor 3 surface. Left: original condition. Right:
after sandblasting by Apollo 12 LM.
For 40 t landers, the higher ejecta quantity and higher
ejecta velocities indicate great damage can occur to an
outpost or an ISRU mining operation. Mitigation is necessary.
Mitigation Techniques
Berms may help but are not a complete solution
Evidence indicates ejecta “bounce” off terrain (dust bounces off sand,
sand bounces off rocks)
40 t landers will cause too much cratering under the lander
Landing pad requirements differ for inner and outer zones
May use different construction methods in inner
and outer zones
Inner methods (high temp, gas impermeable)
Sintering
Pavers with grouting
High temperature polymer infusion in soil
Rock welded pavers
Bring sheet material from Earth
Outer methods (low temp, resist scouring erosion)
Sintering
Pavers (grouting not required)
Low temperature polymer
Rock filtration system
Many groups have done
tests of various
technologies.
These & future tests provide
input for trade studies.
Preliminary trade study is in work
Considerations:
Mass brought from Earth;
Energy required (high energy
systems cannot be landed until
after the landing pads are built);
Construction time;
Reliability.
Conclusions & Future Work
Human-class landers (~40 t) will cause severe pluming effects.
CLPS pluming will be very minimal but this may be deceptive because scaling is a 2.5 power law of vehicle mass.
Pluming can damage surrounding hardware including ISRU operations, habitats, and scientific equipment.
Pluming can damage or destroy spacecraft in lunar orbit if the timing is unfortunate.
Need to continue developing individual mitigation technologies.
Need to complete the mitigation trade study.
Need to develop robotics to implement the mitigation techniques.
This work is feed-forward to Mars.
The CLASS Planetary Landing Team is set up to advance this effort.
How FAST Landing Pad would be deployed during a mission Credits: Matthew Kuhns
As the United States strategizes its return of humans to the Moon in 2024 and beyond per Space Policy Directive One, there are many challenges in technology and engineering that must be overcome to ensure a successful mission.
One mission element that separates human lunar missions of the present from the Apollo era is lander scale, where Artemis landers propose a landed mass of ~20-60mT versus the ~10mT Apollo lunar module. The engine plume or multi-engine plume from these large landers may pose a range of risks, from high-velocity ejecta abrasion damaging the lander to ejecta damaging other lunar landers or orbital assets, or even creating a crater under the lander as deep as the columnated engine plume. Small landers in the ~1-5mT range, such as those expected to fly on upcoming NASA Commercial Lunar Payload Service (CLPS) missions, are also at risk from ejecta plumes, albeit a smaller risk than the large landers. In all cases, scientific payloads could be damaged due to abrasion from high-velocity regolith ejecta.
There are multiple schools of thought for mitigating lander plume effects. Ideas include choosing locations with more favorable surface conditions and controlling vehicle throttling and descent trajectories, but the solution that retires this risk long-term to establish a sustainable lunar presence is developing lunar infrastructure to land on. There are many approaches to landing pad design, some using in-situ resources and sintering regolith into a hardened surface, others involving bringing pad materials from Earth. These methods are reliant on multiple systems that are at low development phases and require one or more dedicated lunar missions to establish.
FAST Particle injection in the lander engine and deposition on the surface Credits: Matthew Kuhns
The Masten in-Flight Alumina Spray Technique (FAST) Landing Pad changes the approach to landing on planetary bodies by mitigating the landing plume effects by creating a landing pad under the lander as it descends onto a surface. This approach uses engineered particles injected into the rocket plume to build up a coating over the regolith at the landing location. The hardened regolith would have greater thermal resistance and ablation resistance to reduce regolith erosion rates and deep cratering. This innovation would enable large and small landers to safely perform transportation to any region on the Moon without major risks posed by engine plume effects. A lander could land in relatively close proximity to other surface assets without pre-existing infrastructure, which greatly expands potential landing locations and minimizes the need for pad construction missions.
Using a traditional landing pad concept, vehicles would be constrained to land in specific lunar regions, which restricts the ability to gather science across the lunar domain. The FAST concept enhances overall lunar access and access to other planetary surfaces, including Mars, where loose regolith characteristics pose critical mission risks. The cost savings of this innovation is clear, for every dedicated lunar pad building or preparation logistics mission that does not need to be sent saves $120+ million. Providing mission assurance for crewed landings by mitigating deep cratering effects and reducing required shielding saves mass and cost for the Artemis program.
Landers that generate their own pads as they touch down would mean faster, cheaper, and safer planetary exploration
Planetary landings are a messy business that can be dangerous for anything nearby, but they can also be risky for the landers themselves. Engine plumes can kick dust, dirt, and rocks back up toward the spacecraft, endangering engines, science payloads (this happened to a weather instrument on the Curiosity Mars rover), and potentially even astronauts.
We’ve managed so far because most unmanned probes, and even the Apollo lunar landers, have been light enough that their engine plumes have been relatively mild. But as we look toward scaling up our presence on the moon, we’re going to need rockets that are much, much bigger. NASA’s proposed Artemis landers will be somewhere between double and quadruple the mass of Apollo, and modeling suggests that one of these could displace something like 470 tons (!) of lunar soil during landing.
Through NASA’s Innovative Advanced Concepts (NAIC) program, the space agency is funding a creative new approach toward making planetary landings safer for large spacecraft. Masten Space Systems is developing a concept for “Instant Landing Pads,” where a spacecraft builds its own landing pad as it descends toward the surface. By not requiring landing pads to be constructed in advance, this technique would be safer, cheaper, and help us establish a base on the moon as quickly and efficiently as possible.
In all of the renderings of lunar landings that we’ve seen so far (from folks like Blue Origin, Boeing, SpaceX, and NASA itself), the landers themselves have touched down on the lunar surface directly, without a landing pad. It’s certainly possible to do this with large landers, if you’re choosy about where you land and add enough shielding to your vehicle for it to be able to withstand whatever it might kick up. And depending on the size and power of the engine (or engines) and the surface that they’re interacting with, this can be a lot of material—Masten has been doing some testing on Earth, and you can see how much of a problem this can be:
Video Clip "Masten and UCF Crater Testing" click to play video
Finding the right landing location to avoid effects like this, and adding enough shielding to protect the lander, would be restrictive to any lunar program. Shielding is a significant amount of mass that takes away from payload, and if there’s no safe landing area near where you want your moon base to be, you’re out of luck.
The conventional solution is to send smaller landers first, and use local material to construct a landing pad. A project called PISCES is working on doing this with robots, for example. This could certainly work, but you’re adding months or years of lead time to your overall mission, and Masten estimates that it would cost over $100 million for every dedicated lunar pad-building or preparation-logistics mission.
What Masten wants to do instead is to put a pad, instantly, on a planetary surface underneath any rocket just a few seconds before landing.
The system that Masten is developing with NIAC funding is called FAST, or in-Flight Alumina Spray Technique. Here’s how it would work: a few hundred meters above the surface of the moon (or Mars, or anywhere else you want to land), your lander comes to a hover. Alumina pellets are then fed into the engine exhaust nozzle, where they get partially melted in the engine plume and blasted down onto the surface. Most planetary surfaces that a spacecraft would be landing on are cold enough that the alumina cools and hardens on contact, and over the course of about 15 seconds, something like 300 kilograms of alumina gets layered into a totally functional landing pad. You then land as normal, ablating the pad a little bit but not digging a crater under yourself or blasting dirt and rocks all over the place.
Masten has been testing rockets on Earth for years; its fleet of terrestrial test vehicles has accumulated more than 600 rocket-powered landings (on landing pads). This idea came directly out of testing how rocket engine plumes kick up material, Masten chief engineer Matthew Kuhns tells us. “I started brainstorming ideas around ways you could land without needing a precursor mission to create landing pads. Lots of crazy ideas later, this one stood out.”
NIAC is all about funding ideas that seem crazy, but that have enough technical feasibility that they could ultimately pay off.
“We will spend the next nine months looking at how this would benefit the Artemis moon landings,” Kuhns says. “NIAC projects as a rule are very ambitious and usually 10+ years out to use, but in this case since we can build on a terrestrial technology I think we can move a bit faster.”
Masten will be teaming up with Honeybee Robotics to figure out exactly how engines can be modified to use FAST. FAST requires a system to transport the landing-pad material into the engine, which is basically the opposite of a pneumatic sampling system that Honeybee has been working on. Testing is still to come, says Kuhns, but with Masten’s rocket experience, we’re hoping that moving “a bit faster” is a bit of an understatement.
We also asked Kuhns if he sees any problem with leaving these instant landing pads scattered about on the moon. “That would be a good problem to have,” he told us. “It would mean many many missions to the moon, a sustainable presence, and lots of science. Depending on their location and material, you could actually do science with the FAST landing pads and use them as laser or radio reflective arrays.”
NIAC projects are typically funded through three different phases as their technology-readiness level increases. A year from now, we hope to see these Instant Landing Pads make it to phase two, which will bring them that much closer to helping us return to the moon.
Apollo Dust Storm
When Apollo 12 landed on the moon in November of 1969, Commander Pete Conrad managed to bring the lunar module down within about 182 meters of its target—the unmanned Surveyor III probe, which had landed there a few years earlier.
Conrad was almost too precise, landing 152 meters closer to Surveyor III than the actual landing area that NASA was aiming for. NASA’s concern (and the reason for landing farther away) was that the lunar module’s descent stage engine might kick up a bunch of dust that would get all over the probe. As it turned out, and as the astronauts discovered when they made their way over to Surveyor III, it was in fact covered in dust.
Later examination of some of the Surveyor 3 parts that the astronauts brought back revealed that the probe had been indirectly sandblasted as Apollo 12 landed, and that “had Surveyor III been exposed to the direct spray [of the landing lunar module], the damage would have been orders of magnitude higher.”
Two of the most difficult hurdles for human missions to Mars are the challenge of landing human-class (>20t) payloads on the surface, and extracting water from the environment both for human consumption and for fuel.
Beyond the problems of entry and descent, thruster-fired landings have the potential of damaging the landing site, scattering debris, and even excavating a crater that could swallow the lander. This could jeopardize both the landed infrastructure as well as the payload. Preparation of a landing surface resistant to thruster fire may be a critical pre-requisite for ensuring crew safety and mission success.
However, a mitigation for both these problems is advanced preparation of a landing site, as well as stockpiling of water resources, before human-class landers are sent. Preparation of a landing zone will require traversal of a large surface area, as well as a high energy process for hardening the surface. Extracting water from regolith is a high temperature process, with a high volume of regolith required to produce sufficient water. A single mission that performs these two processes while traversing the same terrain would retire two mission-critical risks: landing safely and demonstrating resource extraction.
This study modelled several options for hardening surface regolith while simultaneously extracting water content from the regolith. The energy requirements for extracting water from different grades of regolith were assessed, and preliminary attempts to model the in-place water extraction processes were undertaken. In addition, several methods for hardening regolith to prepare landing zones were analysed, including production of regolith tiles, solar sintering and microwave sintering. Two microwave concepts were studied in detail, and models created to assess their performance in the two mission goals: water extraction and regolith sintering. The result is that a precursor mission to Mars with a 5t rover with a 20-kW power supply could effectively prepare a safe 100m-radius landing zone for human-scale landers while stockpiling 4-6t water, which would be enough water resources to produce methane propellant and crew consumables for a 4-person 2-year mission.
1 Introduction
The entry, descent, and landing stage of a Mars
mission is one of the most critical stages of a Mars
mission. The largest payload that has successfully
landed on Mars is the Curiosity rover, which is an order
of magnitude smaller than the minimum required mass
for human-class landers. Larger payloads will likely
require thruster firings close to the surface, which raise
the possibility of disturbing the terrain and creating a
crater for the lander to fall into. Landing pad preparation
requires shaping the terrain over a broad area, likely
using high-energy processes, which is a similar mode of
operation to resource extraction.
2 Problem statements
2.1 Disruption of regolith and potential cratering
According to recent research [1] on plume cratering
effects caused by propulsive landing systems, there is
significant risk in landing human mission assets on
Mars (i.e. in the 20-40t range). Studies from Apollo
landings on the moon, showed that lunar regolith and
dust was blasted in a horizontal direction from the
lander, causing damage to nearby instruments (the
Surveyor III lander which was 160m from the Apollo 12
lander). So, effects on nearby extra-terrestrial base
assets have long been known to be a problem. In
addition, the dust raised from landings could cause a
nuisance, especially to deployed solar panels. The
standard mitigation strategy for this is to set the landing
zone a safe distance from the base, and have 2m berms
constructed between the base and the landing zone to
mitigate horizontal ejecta. However, research in the last
10 years has shown that propulsive requirements near
the surface for large landers on Mars could cause
significant cratering. Experiments have been performed
on rocket plumes as they near sand, to help understand
the physics of the plume effects on surfaces. In addition,
computational flow models have been developed to
study the theoretical differences in the gravity regimes
on the moon, Mars and Earth.
Researchers have discovered four mechanisms of
soil movement caused by hot plume gases, in addition to
the mechanical shock caused by the initial overpressure
shockwave hitting the soil. These are viscous erosion
(VE), bearing capacity failure (BCF), diffused gas
eruption (DGE) and diffusion-driven flow (DDF). These
are:
BCF is the bulk shearing caused by the localized
region of high pressure gas underneath the rocket
plume. BCF drives soil perpendicular to the crater’s
surface, the surface of which may change as the
crater enlarges underneath the plume. This is the
primary mechanism considered by previous NASA
JPL studies to identify and mitigate risks for human
Mars missions [2]. The study identified previous
terrestrial tests and analysis estimating that Mars soil
bearing capacity fails at 20 kPa, and this rough
estimate is taken as sufficient criteria to eliminate
the risk. However, the additional surface failure
mechanisms below are less well-understood.
VE is the effect of tangential gas above the soil,
stripping away the top layer of particles.
DGE is an effect of the gas driven into the soil,
which might cause soil eruptions in another place.
DDF is an additional distributed force on the soil,
caused by the cumulative drag of the gas through the
soil. DDF drives soil tangential to the crater’s
surface, away from the tip of the plume.
On Mars, the authors conclude that a 40t spacecraft
landing on Mars will fluidize and crater the soil. They
are particularly concerned about the regolith being
ejected in high trajectories to nearby base elements,
perhaps even sufficiently vertically to strike the
descending spacecraft. In addition, upon engine cut-off,
the fluidized soil may collapse into a crater larger than
the craft itself. Most mission planners at NASA seem to
be ignoring this risk, indeed an abstract highlighting
these risks was proposed to the 2012 Concepts and
Approaches for Mars Exploration workshop at the
Lunar and Planetary Institute, but was not accepted for
presentation [3]. In this study, the authors highlight:
“The need for landing pads is the consensus of
the plume/soil research community after a
decade of concentrated research, including
experiments, physics-bases simulations, and
mission analysis. This finding has not yet been
communicated widely outside the community
of researchers…”
Therefore, it is a key requirement that techniques are
developed to protect the surface from rocket plume
damage, this would include protection from the four key
mechanisms above. However, the researchers in this
field believe that mission planners are likely to be
sceptical of the need for these systems, and so the
physics models need to be improved and validated for
Mars environment and architectures. Without this work,
it is unlikely that an exact determination can be made of
the minimum requirements for soil improvement
measures.
3.2 Landing zone preparation requirements
To mitigate the landing zone risks, several things are
required:
A hardened, level landing area for the final
touchdown of the spacecraft. Levelling is
particularly important in keeping the trajectory of
ejected soil near the horizontal plane — since most
movement is tangential to the surface where the
exhaust plume strikes. Humps or divets in the
landing area would provide some non-horizontal
surfaces that would cause raised trajectories for
ejected particles.
A surrounding area where the dust is fixed, to reduce
the dust raised by the horizontal movement of
particles.
Berms situated between the landing zone and the
existing surface base elements, to catch the particles
ejected tangentially.
An exclusion zone between the landing zone and the
base elements (possibly with roads prepared
between sites to enable dust-free transport).
The size of each of these zones will depend on the
transportation system and specifically the landing
strategy and lander requirements. To summarize the
requirements for a landing pad on the moon or Mars,
one study assumed the lander requirements for an
Altair-type lunar lander would amount to a 30m
diameter hardened landing pad, surrounded by a 70m
dust fixation zone. The study recommended a descent
trajectory that minimized horizontal movement as high
above the terrain as possible, and ending with a final
descent as vertical as possible, to minimize the possible
disturbance of elements on the ground. [5] Studies on
Mars EDL systems tend not to hypothesize on the
landing footprint accuracy, however, the EMC
technology roadmap indicates that a landing accuracy of
< 100 m for human missions is the desirable design
goal. [6]
The required thickness of the landing surface is also
ill-defined, since the effects of rocket plumes on loose
aggregate soil in low-gravity and low-pressure
environments is not well modelled. At a minimum, the
surface needs to withstand the bearing capacity failure
induced by the pressure from the rocket plume. Since
the proposed Mars Descent Module (MDM) thrusters
are 100 kN with a .8 m diameter [7], each produces a
pressure of ~200 kPa, assuming all thrust is directed
downwards. Therefore, the surface should be able to
withstand this. However, as noted in Section 2.1, there
are 3 other disruptive forces on the surface that need to
be resisted: viscous erosion (VE), diffused gas eruption
(DGE) and diffusion-driven flow (DDF). Since viscous
erosion is the disruption of particles on the surface, it
should be mitigated by sintering, which will melt loose
particles into an aggregate. The other two disruptive
forces are caused by diffusion of gas between soil
particles, which should also be drastically reduced by
the reduction/elimination of gaps between particles in
the sintered aggregate. To select the minimum thickness
for our model, we will rely on experimental results of
different sintering methods, to find a tested surface that
meets the minimum capacity. As a minimum baseline
for our model, therefore, we will use 5 cm, which is the
thickest test result that produced the strongest material.
For more details, see the technologies and experimental
test results are reviewed in the next section.
(ed note: The unmanned rover is constantly moving over the landing pad area. The leading edge heats a strip of regolith to 575K {sublimation point}. As it moves over the hot strip, rover captures the escaped gases in a cold trap. As the trailing edge moves over the hot strip it heats it to 1400K {sintering point}, making it suitable for a landing pad. So rover is constantly sublimating, capturing, and sintering.)
CONCEPT 1: In-Situ Orange: Microwave system Blue: Water capture system Black: Structure
CONCEPT 2: 3D
More efficient, but more complicated and more moving parts that can break
4.2 Model description and calculations
The model uses simple geometry to determine a
spiral path of a rover to lay a sintered regolith area in 2
concentric circles. The inner circle is the hardened
landing zone (HLZ), which is characterized by a thicker layer
of sintered regolith to resist the landing thrusters of the
Mars Descent Module. The outer circle is the dust
mitigation zone (DMZ), consisting of a thin layer of sintered
regolith to reduce the dust scattering from the
horizontally-deflected gases of the engine plumes. The
required sintered volume of each zone is calculated, and
this proportion is used to assign the available mission
time to each zone, as a rudimentary way of balancing
the power requirements – the overall volume to be
sintered corresponds to the energy output for each zone.
The time available for each zone is subdivided into
individual “steps” for the rover, each of which
volatilizes and sinters a certain small footprint of area
under the rover. The energy requirements for each step
is determined based on the step size, depth required, and
the regolith properties. Given the time allocated for each
step, the necessary power can be calculated.
(ed note: lots of equations and minutiae omitted. See paper for details)
The Excel solver was used
to optimize the following input parameters, while
maximizing the water captured, given the corresponding
constraints:
The HLZ sinter depth: must be between 5-10 cm.
The DMZ sinter depth: must be between 2 mm - 5
cm.
The HLZ diameter must be greater than 30m and
less than the DMZ diameter (which was fixed at
200m)
[1] P. Metzger, X. Li, C. Immer, and J. Lane, “ISRU
implications for lunar and martian plume effects,”
in 47th AIAA Aerospace Sciences Meeting
including The New Horizons Forum and
Aerospace Exposition, 2009, p. 1204.
[2] D. W. Beaty et al., “An analysis of the precursor
measurements of Mars needed to reduce the risk
of the first human missions to Mars.” unpublished
white paper, 2005.
[3] P. Metzger, P. Hintze, and R. Mueller, “Precursor
Activities To Solve Plume Cratering Problems
For Human-Class Mars Landers,” presented at the
Concepts and Approaches for Mars Exploration,
Houston, Texas, 2012, vol. 4359.
[5] B. Khoshnevis, A. Carlson, and M. Thangavelu,
“ISRU-Based Robotic Construction Technologies
For Lunar And Martian Infrastructures,” Apr.
2017.
[6] D. A. Craig, P. Troutman, and N. Herrmann,
“Pioneering Space Through the Evolvable Mars
Campaign,” 2015.
[7] B. G. W. K. D. Drake, “Human Exploration of
Mars Design Reference Architecture 5.0,
Addendum #2,” Mar. 2014.
Most of the potent engines have exhausts measured in thousands of degrees. What about landing? We don't want our ships to touch down on a new planet only to immediately sink out of sight in a self-created sea of lava.
(We will ignore that unpleasant little man in the front row who is asking loudly: why don't we keep the rocket in orbit and land with the small shuttle we carried along?)
As a side note, the SpaceX Falcon 9 has retractable landing legs. This is because while landing the white-hot exhaust is blown upward around the rocket base. If the legs were extended into that blowtorch they would be incinerated. Instead they deploy at the very last minute. Well, actually the other reason to deploy at the last minute is the legs interfere with using the grid fins to steer the landing.
As a wild guess, the exhaust temperature is approximately 100 K * Ve2. So an exhaust velocity of 20,000 m/s is on the order of 40,000 K.
The particle energy(approximately the temperature inside the engine) is
Ae = (0.5 * Am * Av2) / B
where
Ae = particle energy (Kelvin)
Am = mass of particle (g) (1.6733e-24 grams for monatomic hydrogen)
Av = exhaust velocity (cm/s)
B = Boltzmann's constant: 1.38e-16(erg K-1)
But more to the point is total plume energy.
Fp = (F * Ve) / 2
where
Fp = thrust power (watts)
F = thrust (newtons)
Ve = exhaust velocity (m/s)
(Note that exhaust velocity is in two different units in the two equations)
[1] Exhaust power. Say we have a gas core rocket with an exhaust velocity of 50,000 m/s and 1,000,000 newtons of thrust. We've got 25,000,000,000 watts on our hands (25 gigawatts). Say that the exhaust is concentrated mainly in a 10 meter diameter circle on the final descent. The area is about 80 square meters, for a heat flux of roughly 300 megawatts per square meter. Which will vaporize the surface layer of about anything. The question becomes: how deep?
[2] Heat radiation. We're talking about very high temperatures here, so maybe the surface might radiate heat away faster than the exhaust deposits it? If nothing else, it will give a rough upper limit to the temperatures involved. The 300 MW/m2 flux correspond roughly to black-body radiation at 8500 K. So the temperatures may well be of that order of magnitude.
[3] Heat Conduction. Let's say the surface gets really hot. How fast is the heat conducted below the surface? Many rocks seem to have conductivities on the order of 2 W/m-K or so. At that rate, the temperature gradient would have to be incredibly high to balance the influx; 150 MK/m. I suspect that indicates that the surface would probably ablate to vapour and escape, with only the thinnest layer liquid at any given time. Maybe a micrometre or so on average.
[4] Quantity vaporized. As a rough guideline, many rocks at normal temperatures have heat capacities of about 1 kJ/kg-K. Extrapolating wildly, I could assume that they don't vary by too much at higher temperatures. If their temperature is raised on the order of 7000 K, then they will carry off something like 7 MJ/kg. Now, we can probably assume a density of about 3000 kg/m3, so that's 21 GJ/m3. If the final part of the landing takes about 20 seconds, that's up to about 23 m3 of rock. Dividing by the assumed area, we get a very shallow crater about 30 cm deep (about a foot).
So, based on the above figures I'd guess that a plume of exhaust like that would erode the surface, breaking it down into vapour or even decomposing it, with the resulting gases dissipating rapidly. With heat conduction so low compared to the incoming energy, there simply won't be enough time for a pool of lava to form. Any liquid would be blasted outward by superhot gases, vaporizing and then recondensing along the way.
My guess is that you'd get a broad but shallow crater, surrounded for quite some distance by ash condensed from the escaping gases and of course any debris that might have been carried along for the ride.
Timothy Little
Timothy's masterful analysis does have some alarming consequences. Considering that we might be
using a gas core atomic rocket, this means when it lands it becomes a lean, mean, fallout machine.
"Nice landing, Skipper!" called out Oscar.
"Yea bo!" agreed Tex.
"Thanks, fellows. Well, let's get the stilts down." He punched a stud on the control board. Like most rockets built for jet landings, the jeep was fitted with three stabilizing jacks which came telescoping out of the craft's sides and slanting downward. Hydraulic pressure forced them down until they touched something solid enough to hold them, whereupon the thrusting force was automatically cut off and they locked in place, propping the rocket on three sides, tripod fashion, and holding it erect.
Thurlow waited until three little green lights appeared under the stud controlling the stilts, then unclutched the jeep's stabilizing gyros. The jeep held steady, he unstrapped. "All right, men. Let's take a look. Matt and Tex, stay inside. Oscar, if you don't mind my mentioning it, since it's your home town, you should do the honors."
"Right!" Oscar unstrapped and hurried to the lock. There was no need to check the air, since Venus is man-inhabited, and all of them, as members of the Patrol, had been immunized to the virulent Venerian fungi.
Thurlow crowded close behind him. Matt unstrapped and came down to sit by Tex in the passenger rest Oscar had left. The space around the lock was too limited in the little craft to make it worthwhile to do anything but wait.
Oscar stared out into the mist. "Well, how does it feel to be home?" asked Thurlow.
"Swell! What a beautiful, beautiful day!"
Thurlow smiled at Oscar's back and said, "Let's get the ladder down and see where we are." The access door was more than fifty feet above the jeep's fins, with no convenient loading elevator.
"Okay." Oscar turned and squeezed past Thurlow. The jeep settled suddenly on the side away from the door, seemed to catch itself, then started to fall over with increasing speed. "The gyros!" yelled Thurlow. "Matt, clutch the gyros!" He tried to scramble past Oscar; they fouled each other, then the two fell sprawling backwards as the jeep toppled over.
At the pilot's yell Matt tried to comply — but he had been sprawled out, relaxing. He grabbed the sides of the rest, trying to force himself up and back to the control station, but the rest tilted backwards; he found himself "skinning the cat" out of it, and then was resting on the side of the craft, which was now horizontal.
(ed note: re 'skinning the cat', "In America, as any country boy knows, this means to hang by the hands from a branch or bar, draw the legs up through the arms and over the branch, and pull oneself up into a sitting position." -- "A Hog on Ice" by Charles Earle Funk)
A quick look around was enough to confirm Oscar's prediction; the jeep lay on her side with her fins barely touching solid ground. The nose was lower than the tail and sinking in thin, yellow mud. The mud stretched away into the mist, like a flat field, its surface carpeted with a greenish-yellow fungus except for a small space adjacent to the ship where the ship, in failing, had splashed a gap in the surface.
Matt had no time to take the scene in; the mud was almost up to the door.
"Quit talking and get busy." Oscar trotted the length of the craft, taking the end of the line with him. He made it to the bank by stepping from a tail fin.
Matt and Tex had no trouble carrying Thurlow as far as the fins, but the last few feet, from fins to bank, were awkward. They had to work close to the jet tube, still sizzling hot, and balance themselves in a trough formed by a fin and the converging side of the ship. They finally made it by letting Oscar take most of the lieutenant's weight by hauling from the bank with his one good arm,
When they had gotten Thurlow laid out on the turf Matt jumped back aboard the jeep. Oscar shouted at him. "Hey, Matt — where do you think you're going?"
"Back inside."
"Don't do it. Come back here." Matt hesitated, Oscar added, "That's an order, Matt."
Matt answered, "I'll only be a minute. We've got no weapons and no survival kits. I'll duck in and toss them out."
"Don't try it." Matt stood still a moment, balanced between Oscar's unquestioned seniority and the novelty of taking direct orders from his roommate. "Look at the door, Matt," Oscar added. "You'd be trapped."
Matt looked. The far end of the door was already in the mud and a steady stream was slopping into the ship, like molasses. As he looked the jeep rolled about a quarter turn, seeking a new stability. Matt made it to the bank in one flying leap.
From SPACE CADET by Robert Heinlein (1948)
The Nerva-K behaved perfectly. We hovered for several minutes to melt our way through various layers of frozen gases and get ourselves something solid to land on. Condensing volatiles steamed around us and boiled below, so that we settled in a soft white glow of fog lit by the hydrogen flame.
Black wet ground appeared below the curve of the landing skirt. I let the ship drop carefully, carefully … and we touched.
It took us an hour to check the ship and get ready to go outside.
I was screwing down my helmet when Jerome started shouting obscenities into the helmet mike. I cut the checklist short and followed him out.
One look told it all.
The black wet dirt beneath our landing skirt had been dirty ice, water ice mixed haphazardly with lighter gases and ordinary rock. The heat draining out of the Nerva jet had melted that ice. The rocks within the ice had sunk, and so had the landing vehicle, so that when the water froze again it was halfway up the hull. Our landing craft was sunk solid in the ice.
We did have one chance. The landing vehicle was designed to move about on Pluto’s surface; and so she had a skirt instead of landing jacks. Half a gravity of thrust would have given us a ground effect, safer and cheaper than using the ship like a ballistic missile. The landing skirt must have trapped gas underneath when the ship sank, leaving the Nerva-K engine in a bubble cavity.
We could melt our way out.
I know we were as careful as two terrified men could be. The heat rose in the Nerva-K, agonizingly slow. In flight there would have been a coolant effect as cold hydrogen fuel ran through the pile. We couldn’t use that. But the environment of the motor was terribly cold. The two factors might compensate, or—Suddenly dials went wild. Something had cracked from the savage temperature differential. Jerome used the damper rods without effect. Maybe they’d melted. Maybe wiring had cracked, or resistors had become superconductors in the cold. Maybe the pile—but it doesn’t matter now.
After the fiasco with the Nerva-K, one of us had to go down and see how much damage had been done. That meant tunneling down with the flame of a jet backpack, then crawling under the landing skirt. We didn’t talk about the implications. We were probably dead. The man who went down into the bubble cavity was even more probably dead; but what of it? Dead is dead.
I feel no guilt. I’d have gone myself if I’d lost the toss.
The Nerva-K had spewed fused bits of the fission pile all over the bubble cavity. We were trapped for good. Rather, I was trapped, and Jerome was dead. The bubble cavity was a hell of radiation.
Tailsitters land on their tails, like a SpaceX rocket. Belly landers land on their belly, like an aircraft or helicopter.
Belly landers for use on planets with an atmosphere typically land much like aircraft, on long runways. A standard aircraft runway is from 1,829 to 2,438 meters long, longer will handle wide-body aircraft. The Shuttle Landing Facility at the Kennedy Space Center in Florida was a whopping 4,600 meters. Of course the Shuttle is a bit bigger than your average aircraft, and comes in with a totally dead-stick landing.
Belly landers for use on airless planets will probably land vertically on rockets like a tailsitter. Except the rockets will be in the ship's belly instead of the tail. Just like a Space 1999 Eagle Transporter doing a touch-down.
Since the major reason to use a belly lander is to simplify loading and unloading cargo, a spaceport built to accommodate belly landers will probably have lots of cargo warehouses.
Traveller Scout Service base. No landing ground (runway), just vertical take-off/landing pad in center of parkbay. Berm protects the base if the landing ship crashes. Once landed, the ship is moved into an empty ship berth.
From Happy Landings! Starport Design in Traveller by Thomas M. Price. White Dwarf magazine Issue 43 (July 1983)
Traveller 'E' class starport (Frontier). Little more than a spot of cleared ground for a landing ground (runway). No fuel, no repair yards, no shipyards, no parkbays. From Happy Landings! Starport Design in Traveller by Thomas M. Price. White Dwarf magazine Issue 43 (July 1983)
Bellylander Pilot View
For a belly lander the pilot will need similar cockpit windows to a conventional aircraft IF THEY ARE LANDING AT A SPACEPORT WITH A RUNWAY AND AN AIR TRAFFIC CONTROL SYSTEM. If they are landing in a wilderness enviroment in an unknown patch of ground that sort of looked flat from orbital surveillance, more windows/cameras will be needed. Suggestions include a droop-nose like the Concorde Supersonic Transport and helicopter chin bubbles. Both allow the pilot a better view of the irregular makeshift runway.
If the bellylander is a vertical take-off and landing vehicle, it might only need the chin bubbles. If you were building a NASA type vehicle where you couldn't afford the mass penalty of upper windows.
Belly landing also made sense for the LUNOX proposal. As did windows facing downwards ("chin bubbles"). Since this design is a vertical take-off and landing (VTOL), the chin bubbles are the only windows it has or needs.
Note how there are downward pointing windows ("chin bubbles") as well as the standard upwards. It needs both since in addition to VTOL the Eagle is also sometimes used like a search helicopter. Eagle Transporter from Space 1999
Water Landings
In Heinlein's Time For The Stars, the torchship Lewis & Clark avoids both the "uneven landing site" problem and the "vaporizing the landing site" problem by the simple expedient of only landing in oceans. This is also true of the landing shuttles carried by starships in Jerry Pournelle's CoDominion universe. Alas, this won't work very well for a non-interstellar spacecraft, as the only planet in the solar system with an ocean is Terra(with the possible exception of a methane ocean on Titan. Some of Jupiter's moons may have oceans of water, but these are covered by many miles of ice.)
Be aware that water landing creates additional problems when it comes to embarking.
Model-maker Randall Gilliland's diorama from The Last Planet AKA Star Rangers by Andre Norton, 1953. Collected in Star Soldiers (2001), currently a free eBook in the Baen free library.
Detail
Detail
Old Shipwrecks
Artwork by Sung Choi
click for larger image
Artwork by Mel Hunter
Artwork by Alex Schomburg
Artwork by Mel Hunter
Artwork by Al Feldstein. Cover of Weird Fantasy July 1953






 The poor man's way of landing on a planet with an atmosphere is by utilizing aerobraking and aerocapture. Pretty much all of NASA's manned rockets use this method. What you do is equip your spacecraft with a streamlined heat shield (technical term is "aeroshell"), and use air friction to eliminate your deltaV. Hopefully you can reduce the deltaV to zero before you run out of either heat shield (i.e., "burning up in re-entry") or altitude (i.e., "auger in").
The poor man's way of landing on a planet with an atmosphere is by utilizing aerobraking and aerocapture. Pretty much all of NASA's manned rockets use this method. What you do is equip your spacecraft with a streamlined heat shield (technical term is "aeroshell"), and use air friction to eliminate your deltaV. Hopefully you can reduce the deltaV to zero before you run out of either heat shield (i.e., "burning up in re-entry") or altitude (i.e., "auger in").





















































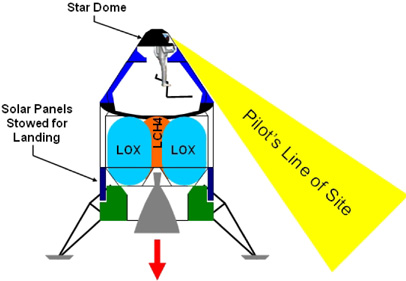








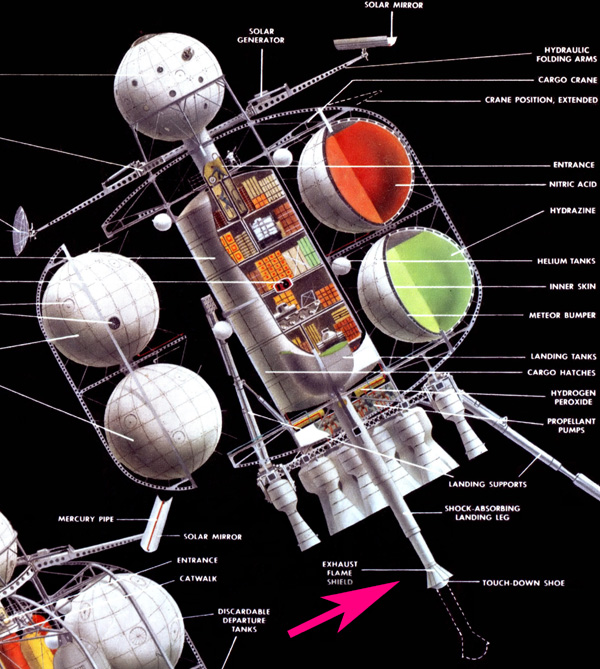

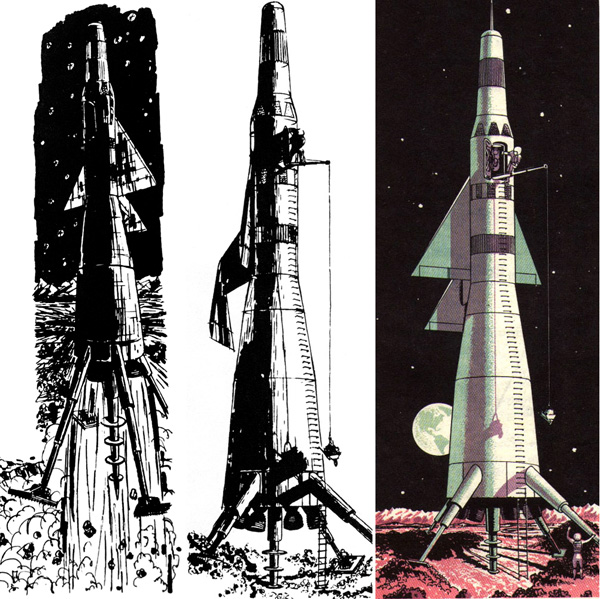





























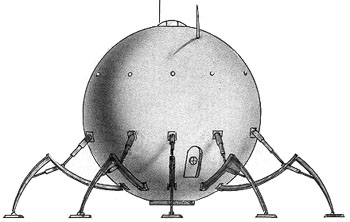
































































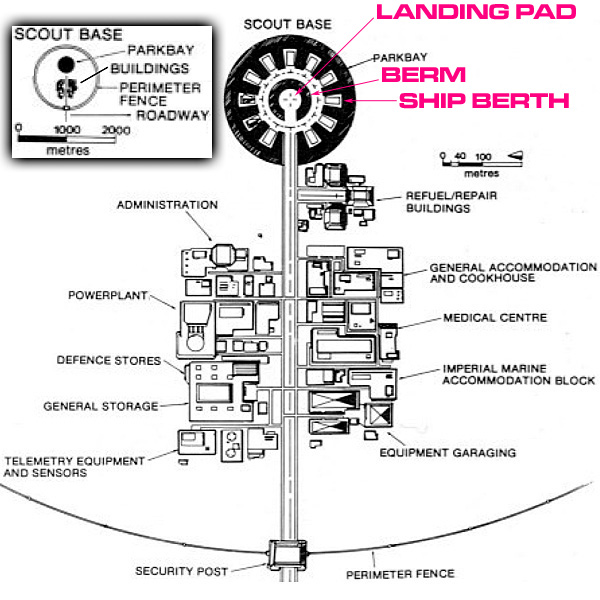
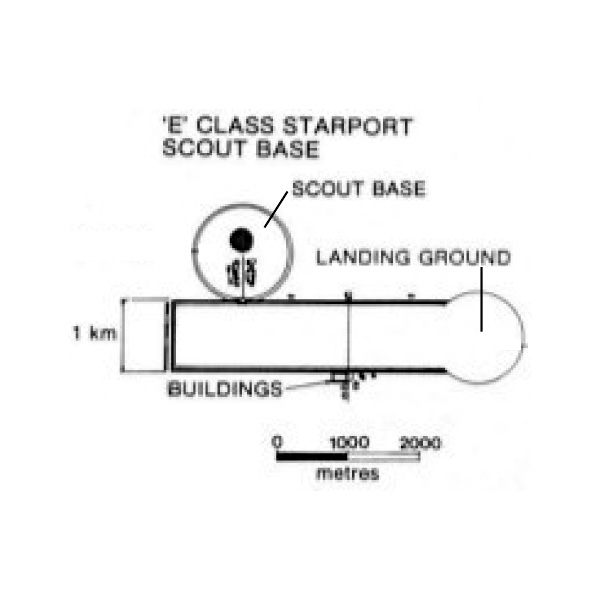



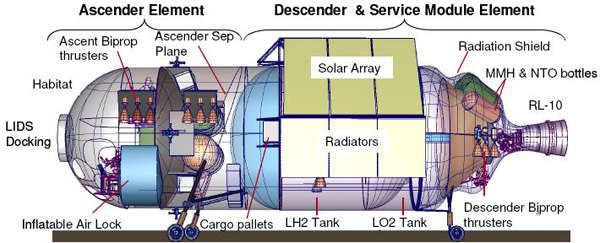
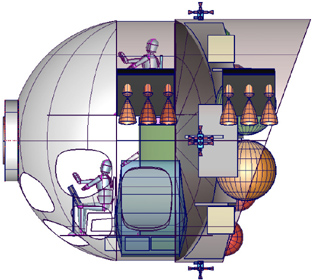
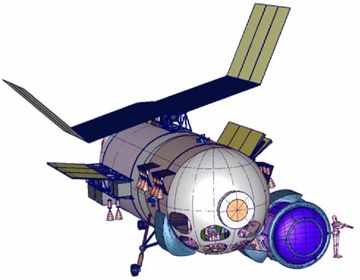
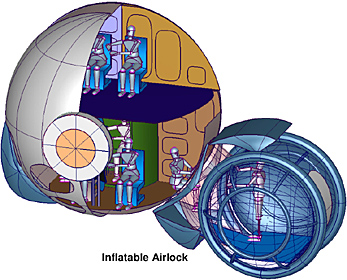

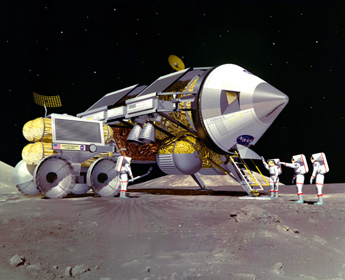

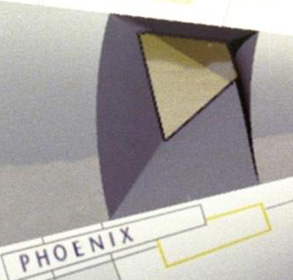








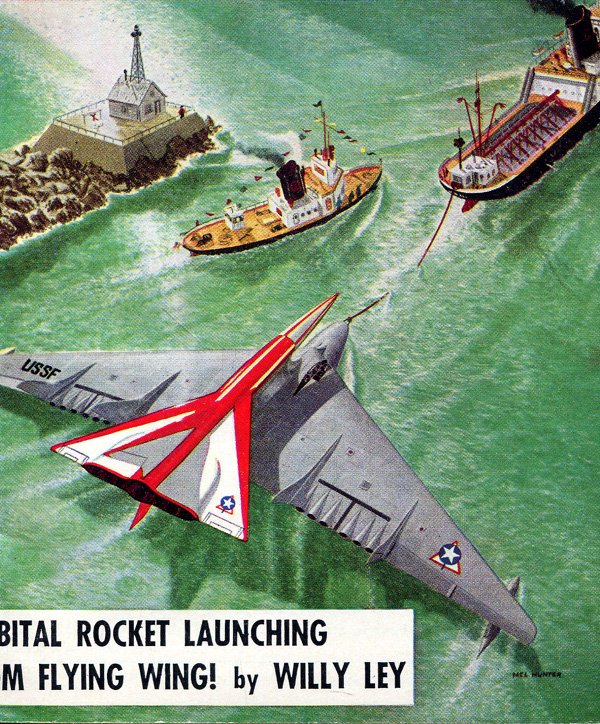

























































{kind=link}
{kind=link}
{kind=link}